
Уравнивание углов на станции параметрическим способом
В табл. 13 даны результаты равноточных измерений углов на станции (рис. 4).
Рис. 4. Углы на станции
Результаты измерений βi
| № углов | Углы | βi | № углов | Углы | βi |
| АКВ | 20° 00′ 05,2″ | АКД | 65° 20′20,0″ | ||
| ВКС | 20° 00′ 10,1″ | ВКД | 45° 20′ 05,0″ | ||
| СКД | 25° 20′ 00,0″ |
Число всех измеренных углов n = 5; число необходимых измерений t = 3.
Выберем в качестве параметров х1, х2, х3 соответственно первый, второй, третий углы. Четвертый и пятый углы можно представить как суммы параметров.
Составим параметрические уравнения связи по формуле:
 (40)
(40)
Введем приближенные значения параметров, приняв их равными измеренным значениям соответствующих углов:
Перейдем к параметрическим уравнениям поправок:

Составим нормальные уравнения:
Bычислим коэффициенты и свободные члены нормальных уравнений (табл. 14).
Таблица параметрических уравнений
Систему нормальных уравнений решим методом обращения
Элементы обратной матрицы Ntt -1 получим на ПК, используя математические функции электронных таблиц Еxсel или системы Mathсad.

Контроль вычисления неизвестных:
4·3,038 +6·(-0,688) + 6·(-0,688) — 3,9 = 0.
В табл. 14 по формуле (28) вычислим поправки к результатам измерений. Сделаем контроль решения по МНК.
Найдем уравненные значения углов  (табл. 15). Выполним контроль уравнивания:
(табл. 15). Выполним контроль уравнивания:  .
.
Оценим точность результатов измерений.
— средняя квадратическая ошибка результатов измерений.
Уравненные значения углов. Контроль уравнивания
| № п/п |  | Параметры и их функции | Fi(x1, x2, x3) |
| 20°00′ 08,24″ | x1 | 20° 00′ 08,24″ | |
| 20° 00′ 09,41″ | x2 | 20° 00′ 09,41″ | |
| 25° 19′ 59,31″ | x3 | 25° 19′ 59,31″ | |
| 65° 20′ 16,96″ | x1 + x2 +x3 | 65° 20′ 16,96″ | |
| 45° 20′ 08,72″ | x2 + x3 | 45° 20′ 08,72″ |
Оценим точность уравненных углов. Обратный вес функции найдем через элементы обратной матрицы по формуле:
— обратный вес первой функции.
— обратный вес второй функции.
 — обратный вес параметра (j = 1, 2, 3).
— обратный вес параметра (j = 1, 2, 3).
 — средняя квадратическая ошибка параметра.
— средняя квадратическая ошибка параметра.
— средние квадратические ошибки весовых функций.
Источник
3. Уравнивание геодезической сети параметрическим способом
3.1. Краткие сведения из алгоритма способа
Сущность параметрического способа отражается в принципах, положенных в основу составления уравнений поправок. Дальнейшая задача сводится к их решению при условии метода наименьших квадратов.
Для составления уравнений поправок выбирают независимые параметры  . В качестве параметров выбирают величины, которые связаны функциональными зависимостями с результатами измерений. Для всех независимых параметров назначают их предварительные значения
. В качестве параметров выбирают величины, которые связаны функциональными зависимостями с результатами измерений. Для всех независимых параметров назначают их предварительные значения
 . К ним из уравнивания отыскивают поправки
. К ним из уравнивания отыскивают поправки .
.
Обозначим численные значения измеренных величин за  ,j = 1. , n, где n – количество измеренных величин и будем называть их уравниваемыми величинами. Уравненные значения этих величин обозначим за
,j = 1. , n, где n – количество измеренных величин и будем называть их уравниваемыми величинами. Уравненные значения этих величин обозначим за  . В качестве независимых параметров обычно принимают координаты пунктов.
. В качестве независимых параметров обычно принимают координаты пунктов.
Независимые параметры связаны функциональными зависимостями с уравниваемыми величинами
 .
.
Это выражение называется уравнением связи, оно справедливо и по отношению к уравненным величинам и уравненным параметрам
 , (19)
, (19)
причем  , где
, где
 — измеренное значение,
— измеренное значение, — поправка к измеренной величине,
— поправка к измеренной величине, — поправки к предварительным значениям параметров.
— поправки к предварительным значениям параметров.
Систему уравнений (19) приводят к линейному виду и получают систему линейных уравнений поправок:
 ,
,
или  , (20)
, (20)
где  — свободный член уравнения поправок;
— свободный член уравнения поправок;
 — коэффициенты уравнений поправок, вычисляемые по формулам:
— коэффициенты уравнений поправок, вычисляемые по формулам:
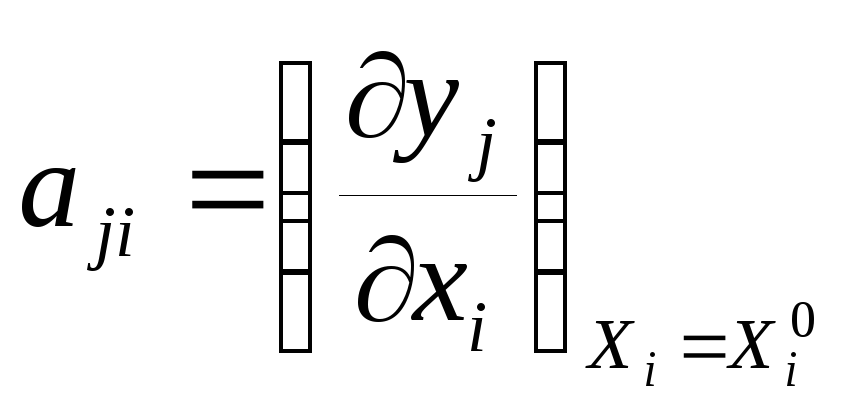 . (21)
. (21)
В матричной форме записи система параметрических уравнений имеет вид:
 , (22)
, (22)
где  — вектор-столбец поправок в измеренные величины, количество строк которого (n) совпадает с количеством измеренных величин;
— вектор-столбец поправок в измеренные величины, количество строк которого (n) совпадает с количеством измеренных величин;
 — матрица коэффициентов уравнений поправок, количество строк матрицы соответствует количеству измеренных величин(n), а столбцов – количеству параметров (k);
— матрица коэффициентов уравнений поправок, количество строк матрицы соответствует количеству измеренных величин(n), а столбцов – количеству параметров (k);
 — вектор поправок к приближенным значениям параметров;
— вектор поправок к приближенным значениям параметров;
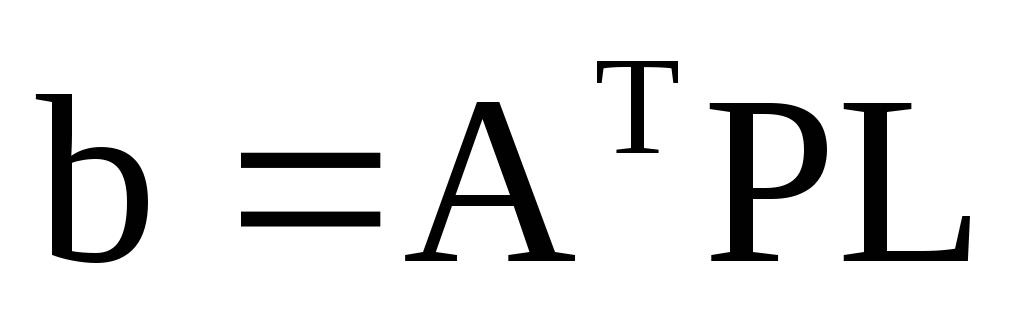
 — вектор свободных членов уравнений поправок.
— вектор свободных членов уравнений поправок.
Для приведения системы уравнений к равноточному виду и переходу к системе нормальных уравнений умножим систему (22) слева на  , где
, где — транспонированная матрица коэффициентов уравнений поправок;P – диагональная матрица весовых коэффициентов измеренных величин. Веса измеренных величин определяются по формуле
— транспонированная матрица коэффициентов уравнений поправок;P – диагональная матрица весовых коэффициентов измеренных величин. Веса измеренных величин определяются по формуле  , где
, где  — ошибка единицы веса, назначаемая до уравнивания,
— ошибка единицы веса, назначаемая до уравнивания,  — средняя квадратическая ошибкаj измерения. Система нормальных уравнений имеет вид:
— средняя квадратическая ошибкаj измерения. Система нормальных уравнений имеет вид:
 , (23)
, (23)
где  — матрица коэффициентов нормальных уравнений;
— матрица коэффициентов нормальных уравнений;
 .
.
Решение системы (23) находим в виде
 , (24)
, (24)
где 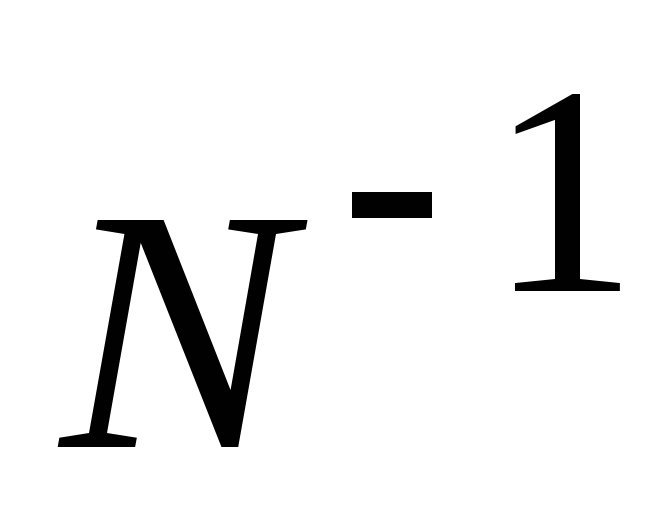 — матрица, обратная к матрице нормальных уравнений.
— матрица, обратная к матрице нормальных уравнений.
Подставив решение системы нормальных уравнений в выражение (22), найдем вектор поправок в измеренные величины.
После этого необходимо произвести оценку точности. Вычисляют ошибку единицы веса после уравнивания по формуле :
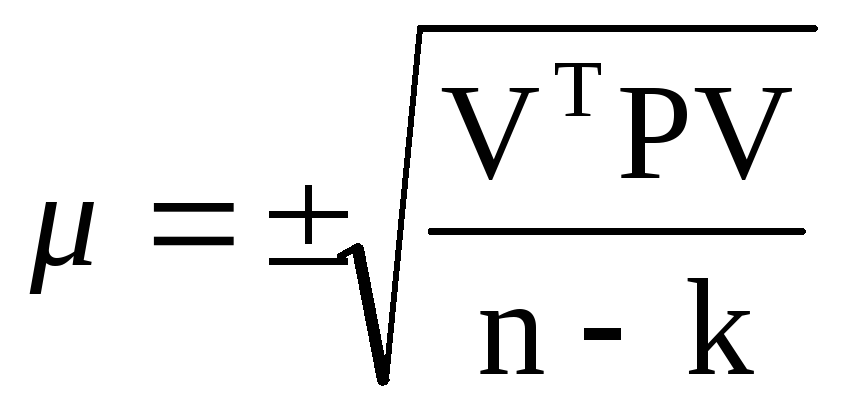 , (25)
, (25)
где n –число всех измерений,
k – число параметров;
V T – транспонированный вектор поправок в измеренные величины;
Р – матрица весов измеренных величин;
V — вектор поправок в измеренные величины.
Точность определения параметров из уравнивания характеризуется величиной средней квадратической ошибки, значение которой определяется из соотношения 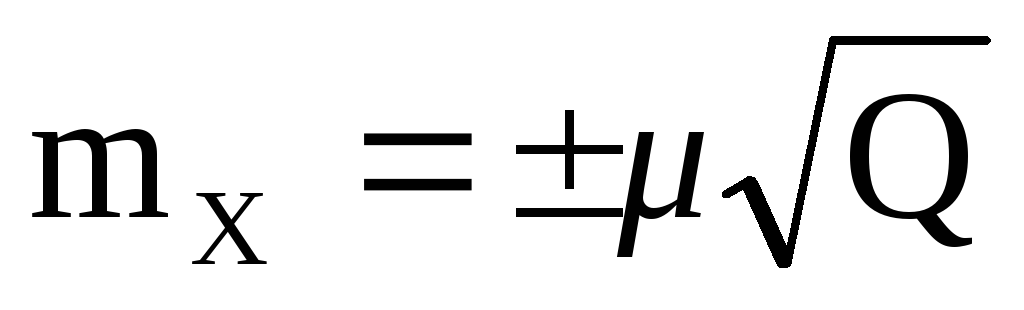 , гдеQ –обратные веса параметров, являющиеся диагональными элементами матрицы
, гдеQ –обратные веса параметров, являющиеся диагональными элементами матрицы  .
.
Источник
3. Уравнивание геодезической сети параметрическим способом
3.1. Краткие сведения из алгоритма способа
Сущность параметрического способа отражается в принципах, положенных в основу составления уравнений поправок. Дальнейшая задача сводится к их решению при условии метода наименьших квадратов.
Для составления уравнений поправок выбирают независимые параметры  . В качестве параметров выбирают величины, которые связаны функциональными зависимостями с результатами измерений. Для всех независимых параметров назначают их предварительные значения
. В качестве параметров выбирают величины, которые связаны функциональными зависимостями с результатами измерений. Для всех независимых параметров назначают их предварительные значения
 . К ним из уравнивания отыскивают поправки
. К ним из уравнивания отыскивают поправки .
.
Обозначим численные значения измеренных величин за  ,j = 1. , n, где n – количество измеренных величин и будем называть их уравниваемыми величинами. Уравненные значения этих величин обозначим за
,j = 1. , n, где n – количество измеренных величин и будем называть их уравниваемыми величинами. Уравненные значения этих величин обозначим за  . В качестве независимых параметров обычно принимают координаты пунктов.
. В качестве независимых параметров обычно принимают координаты пунктов.
Независимые параметры связаны функциональными зависимостями с уравниваемыми величинами
 .
.
Это выражение называется уравнением связи, оно справедливо и по отношению к уравненным величинам и уравненным параметрам
 , (19)
, (19)
причем  , где
, где
 — измеренное значение,
— измеренное значение, — поправка к измеренной величине,
— поправка к измеренной величине, — поправки к предварительным значениям параметров.
— поправки к предварительным значениям параметров.
Систему уравнений (19) приводят к линейному виду и получают систему линейных уравнений поправок:
 ,
,
или  , (20)
, (20)
где  — свободный член уравнения поправок;
— свободный член уравнения поправок;
 — коэффициенты уравнений поправок, вычисляемые по формулам:
— коэффициенты уравнений поправок, вычисляемые по формулам:
 . (21)
. (21)
В матричной форме записи система параметрических уравнений имеет вид:
 , (22)
, (22)
где  — вектор-столбец поправок в измеренные величины, количество строк которого (n) совпадает с количеством измеренных величин;
— вектор-столбец поправок в измеренные величины, количество строк которого (n) совпадает с количеством измеренных величин;
 — матрица коэффициентов уравнений поправок, количество строк матрицы соответствует количеству измеренных величин(n), а столбцов – количеству параметров (k);
— матрица коэффициентов уравнений поправок, количество строк матрицы соответствует количеству измеренных величин(n), а столбцов – количеству параметров (k);
 — вектор поправок к приближенным значениям параметров;
— вектор поправок к приближенным значениям параметров;
 — вектор свободных членов уравнений поправок.
— вектор свободных членов уравнений поправок.
Для приведения системы уравнений к равноточному виду и переходу к системе нормальных уравнений умножим систему (22) слева на  , где
, где — транспонированная матрица коэффициентов уравнений поправок;P – диагональная матрица весовых коэффициентов измеренных величин. Веса измеренных величин определяются по формуле
— транспонированная матрица коэффициентов уравнений поправок;P – диагональная матрица весовых коэффициентов измеренных величин. Веса измеренных величин определяются по формуле  , где
, где  — ошибка единицы веса, назначаемая до уравнивания,
— ошибка единицы веса, назначаемая до уравнивания,  — средняя квадратическая ошибкаj измерения. Система нормальных уравнений имеет вид:
— средняя квадратическая ошибкаj измерения. Система нормальных уравнений имеет вид:
 , (23)
, (23)
где  — матрица коэффициентов нормальных уравнений;
— матрица коэффициентов нормальных уравнений;
 .
.
Решение системы (23) находим в виде
 , (24)
, (24)
где  — матрица, обратная к матрице нормальных уравнений.
— матрица, обратная к матрице нормальных уравнений.
Подставив решение системы нормальных уравнений в выражение (22), найдем вектор поправок в измеренные величины.
После этого необходимо произвести оценку точности. Вычисляют ошибку единицы веса после уравнивания по формуле :
 , (25)
, (25)
где n –число всех измерений,
k – число параметров;
V T – транспонированный вектор поправок в измеренные величины;
Р – матрица весов измеренных величин;
V — вектор поправок в измеренные величины.
Точность определения параметров из уравнивания характеризуется величиной средней квадратической ошибки, значение которой определяется из соотношения  , гдеQ –обратные веса параметров, являющиеся диагональными элементами матрицы
, гдеQ –обратные веса параметров, являющиеся диагональными элементами матрицы  .
.
Источник



