
iSopromat.ru

Рассмотрим три существующих способа задания движения материальной точки: координатный, векторный и естественный.
Чтобы иметь возможность определить параметры движения точки необходимо задать закон ее движения.
В зависимости от известных величин и поставленной задачи могут быть использованы следующие способы задания движения точки: векторный, координатный и естественный.
Векторный
При векторном способе задания движения положение точки определяется радиус-вектором, проведенным из неподвижной точки в выбранной системе отсчета.

Координатный
При координатном способе задания движения задаются координаты точки как функции времени:
Это параметрические уравнения траектории движущейся точки, в которых роль параметра играет время t. Чтобы записать ее уравнение в явной форме, надо исключить из них t.
Естественный
При естественном способе задания движения задаются траектория точки, начало отсчета на траектории с указанием положительного направления отсчета, закон изменения дуговой координаты: s=s(t). Этим способом удобно пользоваться, если траектория точки заранее известна.
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
Источник
Способы задания движения точки
Для решения задач кинематики необходимо, чтобы изучаемое движение было задано. Оно считается заданным, если в любой момент времени однозначно можно определить положение точки в пространстве относительно заданной системы отсчета. Используют три основных способа задания движения точки: векторный, координатныйи естественный.
Векторный способ. Положение движущейся точки М в любой момент времени можно определить с помощью ее радиус-вектора, проведенного из центра О, связанного с телом отсчета, в точку М (рис. 1.1). Чтобы задать движение векторным способом, необходимо определить векторную функцию времени в виде:
 (1.1)
(1.1)
Зависимость (1.1) называют уравнением движения точки в векторной форме. Начало радиус-вектора движущейся точки находится в точке О, а конец его перемещается по траектории вместе с точкой М. Геометрическое место концов радиус-вектора, т.е. годограф этого вектора, определяет траекторию движущейся точки.
Координатный способ. С телом отсчета связывают прямоугольную систему декартовых координат, при этом положение точки определяют ее координатами, которые являются скалярными функциями времени (рис. 1.2):

 (1.2)
(1.2)
Уравнения (1.2) называют уравнениями движения точки в координатной форме. Они являются параметрическими уравнениями траектории точки. Исключив из этих уравнений параметр – время, можно получить уравнение траектории.
Между способами задания движения точки имеется связь. Так, если начало декартовой системы координат совпадает с центром, из которого проводится радиус-вектор точки при векторном способе изучения ее движения (см. рис. 1.2), то координаты точки равны проекциям на соответствующие оси радиус-вектора точки
 ,
,
где  – единичные орты координатных осей.
– единичные орты координатных осей.
Естественный способ. Этот способ используют в тех случаях, когда заранее известна траектория точки. На траектории выбирают неподвижную точку О (начало отсчета), а также положительное и отрицательное направления отсчета расстояний точки от начала отсчета (рис. 1.3). Тогда положение точки М на траектории будет однозначно определяться зависимостью криволинейной координаты S = ОМ от времени
 (1.3)
(1.3)
 Связь между координатным и естественным способами определяется выражением
Связь между координатным и естественным способами определяется выражением
 ,
,
где  – первые производные от координат точки по времени; С – постоянная интегрирования, зависящая от начальных условий.
– первые производные от координат точки по времени; С – постоянная интегрирования, зависящая от начальных условий.
Источник
Способы задания движения точки
Чтобы задать движение точки, надо задать ее положение по отношению к выбранной системе отсчета в любой момент времени. Для этого задания можно применять один из трех способов: естественный, координатный, векторный.
1. Естественный способ задания движения точки
Естественным способом задания движения пользуются в тех случаях, когда траектория движущейся точки известна заранее. Непрерывная линия, которую описывает движущаяся точка относительно данной системы отсчета, называется траекторией точки. Если траектория является прямой линией, то движение точки называется прямолинейным, а если кривой линией – то криволинейным.
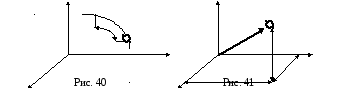
Пусть точка  движется относительно системы отсчета вдоль некоторой траектории
движется относительно системы отсчета вдоль некоторой траектории  (рис. 40). Выберем на этой траектории какую-нибудь неподвижную точку
(рис. 40). Выберем на этой траектории какую-нибудь неподвижную точку  , которую примем за начало отсчета, а затем, рассматривая траекторию как координатную ось, установим на ней положительное и отрицательное направление, как на обычной координатной оси.
, которую примем за начало отсчета, а затем, рассматривая траекторию как координатную ось, установим на ней положительное и отрицательное направление, как на обычной координатной оси.
Тогда положение точки  на траектории будет однозначно определяться криволинейной координатой
на траектории будет однозначно определяться криволинейной координатой  , равной расстоянию от точки
, равной расстоянию от точки  до точки
до точки  , измеренному вдоль дуги траектории и взятому с соответствующим знаком. При движении точка
, измеренному вдоль дуги траектории и взятому с соответствующим знаком. При движении точка  будет перемещаться вдоль траектории, следовательно, расстояние
будет перемещаться вдоль траектории, следовательно, расстояние  будет с течением времени изменяться. Чтобы определить положение точки на траектории в любой момент времени, надо знать зависимость вида:
будет с течением времени изменяться. Чтобы определить положение точки на траектории в любой момент времени, надо знать зависимость вида:
 . (13)
. (13)
Это уравнение выражает закон движения точки. Таким образом, чтобы задать движение точки естественным способом, необходимо знать:
1. Траекторию движения точки;
2. Начало отсчета на траектории с указанием положительного и отрицательного направлений отсчета;
3. Закон движения точки вдоль траектории  .
.
Следует отметить, что величина  определяет положение точки, а не пройденный ей путь. Например, если точка, двигаясь из начала отсчета
определяет положение точки, а не пройденный ей путь. Например, если точка, двигаясь из начала отсчета , доходит до положения
, доходит до положения  , а затем, двигаясь в обратном направлении, приходит в положение
, а затем, двигаясь в обратном направлении, приходит в положение  , то в этот момент ее координата
, то в этот момент ее координата  , а пройденный за это время путь будет равен
, а пройденный за это время путь будет равен .
.
2.Координатный способ задания движения точки
В этом случае положение движущейся точки в пространстве определяют тремя ее декартовыми координатами относительно выбранной неподвижной прямоугольной системы (рис. 41). При движении точки эти координаты являются однозначными и непрерывными функциями времени, т.е. уравнения движения получают в виде
 ,
,  ,
, .(14)
.(14)
При координатном способе задания движения точки траектория в непосредственном виде не дается, но может быть получена из уравнений движения. Исключая из уравнений движения время, получаем два соотношения между координатами  , которые определяют линию, описываемую в пространстве движущейся точкой, т.е. ее траекторию.
, которые определяют линию, описываемую в пространстве движущейся точкой, т.е. ее траекторию.
Если движущаяся точка остается за все время движения в одной и той же плоскости, то, приняв эту плоскость за координатную  , получаем два уравнения движения
, получаем два уравнения движения ,
, .
.
Уравнения движения точки в координатной форме представляют собой уравнение траектории в параметрической форме, где за независимый параметр принято время. Исключая его из уравнений движения, получаем уравнение траектории.
При движении точки в плоскости можно пользоваться не только декартовыми координатами. В этом случае можно ввести в рассмотрение полярные координаты (рис. 42).
Положение точки в этом случае будут определять полярными координатами  и
и , т.е. уравнения движения точки вполярных координатах имеют вид
, т.е. уравнения движения точки вполярных координатах имеют вид  .
.
Тут вы можете оставить комментарий к выбранному абзацу или сообщить об ошибке.
Источник
Способы задания движения точки
Моменты сил относительно точки и оси
Момент силы относительно точки
– вектор, численно равный произведению модуля силы на плечо и направленный перпендикулярно плоскости, содержащей силу и точку, в такую сторону, чтобы смотря ему навстречу, видеть силу стремящейся повернуться против хода час.стрелки. Плечо «h»– кратчайшее расстояние от точки до линии действия силы.
Момент силы равен векторному произведению вектора R на  вектор F. Модуль векторного произведения:
вектор F. Модуль векторного произведения:  R×F×sina= F×h. Для плоской сист. сил обычно находят не вектор момента, а только его модуль:
R×F×sina= F×h. Для плоской сист. сил обычно находят не вектор момента, а только его модуль:  ±F×h, >0 – против час.стр.; ’ h=±2SDOA’B’
±F×h, >0 – против час.стр.; ’ h=±2SDOA’B’
Момент силы относительно оси =0, если сила ½½ оси или линия действия силы пересекает ось. Момент силы относительно оси =0, если сила и ось в одной плоскости.
Момент силы отн-но оси – это есть проекция вектора момента силы отн-но любой точки оси на эту ось.
Способы задания движения точки.
Задать движение точки означает задать ее положение в каждый момент времени. Положение это должно определяться, как уже отмечалось, в какой-либо системе координат. Однако для этого не обязательно всегда задавать сами координаты; можно использовать величины, так или иначе с ними связанные. Ниже описаны три основных способа задания движения точки.
1.Естественный способ. Этим способом пользуются, если известна траектория движения точки. Траекторией называется совокупность точек пространства, через которые проходит движущаяся материальная частица. Это линия, которую она вычерчивает в пространстве. При естественном способе необходимо задать :
а) траекторию движения (относительно какой-либо системы координат);
б) произвольную точку на ней нуль, от которого отсчитывают расстояние S до движущейся частицы вдоль траектории;
в) положительное направление отсчета S (при смещении точки М в противоположном направлении S отрицательно);
г) начало отсчета времени t;
д) функцию S(t), которая называется законом движения точки.
2. Координатный способ. Это наиболее универсальный и исчерпывающий способ описания движения. Он предполагает задание:
а) системы координат (не обязательно декартовой) q1, q2, q3;
б) начало отсчета времени t;
в) закона движения точки, т.е. функций q1(t), q2(t), q3(t).
Говоря о координатах точки, мы всегда будем иметь в виду (если не оговорено противное) ее декартовы координаты.
3. Векторный способ. Положение точки в пространстве может быть определено также и радиус-вектором, проведенным из некоторого начала в данную точку. В этом случае для описания движения необходимо задать:
а) начало отсчета радиус-вектора r;
б) начало отсчета времени t;
в) закон движения точки r(t).
Поскольку задание одной векторной величины r эквивалентно заданию трех ее проекций x, y, z на оси координат, от векторного способа легко перейти к координатному. Если ввести единичные векторы i, j, k ( i = j = k = 1), направленные соответственно вдоль осей x, y и z (рис. 2), то, очевидно, закон движения может быть представлен в виде*)
 Преимущество векторной формы записи перед координатной в компактности (вместо трех величин оперируют с одной) и часто в большей наглядности.
Преимущество векторной формы записи перед координатной в компактности (вместо трех величин оперируют с одной) и часто в большей наглядности.
Способы задания движения точки.
s=f(t) –естественный способ задания движения, прямолинейное движение: х=f(t).
Координатный способ: x=f1(t), y=f2(t), z=f3(t). Уравнение траектории: f(x,y,z)=0.
Векторный способ: радиус-вектор  =
=  ,
,
модуль  , направляющие косинусы:
, направляющие косинусы:  и т.д
и т.д
6. Определение скорости точки при различных способах задания ее движенияВектор_скорости:  ;
;  .Проекции_скорости:
.Проекции_скорости:  ,
,  ,
,  . Модуль_скорости:
. Модуль_скорости:  , направляющие_косинусы:
, направляющие_косинусы:  и т.д.
и т.д.
Естественный_способ:  ,
,  ,
,  – орт касательной.
– орт касательной.
Движение в полярной системе координат: r=r(t) – полярный радиус, j=j(t) – угол. Проекции скорости на
радиальное направление  , поперечное направление
, поперечное направление  ,
,
модуль скорости  .; x=rcosj, y=rsinj.
.; x=rcosj, y=rsinj.
Определение ускорения точки при различных способах задания ее движения
Ускорение_точки.  .
.
Проекции_уск.-я:  и т.д.
и т.д.
Модуль_уск.-я:  ,направляющ.косинусы:
,направляющ.косинусы:
 , и т.д.
, и т.д.
Проекции уск. на радиальное напр-ние  ,
,
поперечное_напр-ние  , модуль_уск-я
, модуль_уск-я  .
.  . 7. Скорости и ускорения различных точек вращающегося тела.
. 7. Скорости и ускорения различных точек вращающегося тела.
Вращательным движением называется движение, при котором все точки тела описывают окружности. Центры этих окружностей лежат на прямой, называемой осью вращения. В общем случае движение твердого тела можно представить как результат сложения поступательного и вращательного движений. При вращательном движении все точки тела описывают окружности, при этом радиус-векторы поворачиваются на угол  за время
за время  . Для того, чтобы указать, в какую сторону совершается поворот, элементарные повороты изображают в виде вектора
. Для того, чтобы указать, в какую сторону совершается поворот, элементарные повороты изображают в виде вектора  . По модулю
. По модулю  равен величине угла поворота, а направление подчиняется правилу правого винта (рис. 1.6). Быстроту вращения характеризует угловая скорость
равен величине угла поворота, а направление подчиняется правилу правого винта (рис. 1.6). Быстроту вращения характеризует угловая скорость  .
.
Рис.1.6Угловой скоростью называется производная от угла поворота по времени.
Модуль угловой скорости равен  .Вектор угловой скорости направлен вдоль оси вращения по правилу правого винта (рис. 1.6). При равномерном вращении угловая скорость
.Вектор угловой скорости направлен вдоль оси вращения по правилу правого винта (рис. 1.6). При равномерном вращении угловая скорость  связана с периодом обращения Т и частотой вращения
связана с периодом обращения Т и частотой вращения  следующим образом
следующим образом
Модуль угловой скорости выражается в радианах в секунду (рад/с). Быстрота изменения угловой скорости характеризуется угловым ускорением  .
.
 Угловым ускорением называется производная от угловой скорости по времени. Модуль углового ускорения равен
Угловым ускорением называется производная от угловой скорости по времени. Модуль углового ускорения равен  При вращении тела вокруг неподвижной оси угловое ускорение
При вращении тела вокруг неподвижной оси угловое ускорение  также как и угловая скорость
также как и угловая скорость  направлено вдоль оси вращения. При ускоренном движении эти вектора сонаправлены
направлено вдоль оси вращения. При ускоренном движении эти вектора сонаправлены  , при замедленном — противоположны
, при замедленном — противоположны  Угловое ускорение измеряется в рад/с 2 . При равномерном вращении
Угловое ускорение измеряется в рад/с 2 . При равномерном вращении
При равнопеременном вращении
 где
где  — начальная угловая скорость.
— начальная угловая скорость.
Знак»+» — при равноускоренном движении.
Знак «-» — при равнозамедленном движении.
 8. Плоскопараллельное движение твердого тела
8. Плоскопараллельное движение твердого тела
Движение, при котором каждая точка тела движется в плоскости параллельно некоторой неподвижной плоскости.
 Плоское движение является сложным. Его всегда можно рассмотреть как совокупность поступательного и вращательного.
Плоское движение является сложным. Его всегда можно рассмотреть как совокупность поступательного и вращательного.
Источник



