
- Способы задания движения точки
- Способы задания движения точки
- 1. Естественный способ задания движения точки
- 2.Координатный способ задания движения точки
- Координатный способ задания движения точки
- Введение
- Определение кинематических величин
- Пример решения задачи
- Определение скорости и ускорения точки по заданным уравнениям ее движения
- Решение
- Определение вида траектории
- Определение скорости точки
- Определение ускорения точки
- Определение остальных величин
Способы задания движения точки
Для решения задач кинематики необходимо, чтобы изучаемое движение было задано. Оно считается заданным, если в любой момент времени однозначно можно определить положение точки в пространстве относительно заданной системы отсчета. Используют три основных способа задания движения точки: векторный, координатныйи естественный.
Векторный способ. Положение движущейся точки М в любой момент времени можно определить с помощью ее радиус-вектора, проведенного из центра О, связанного с телом отсчета, в точку М (рис. 1.1). Чтобы задать движение векторным способом, необходимо определить векторную функцию времени в виде:
 (1.1)
(1.1)
Зависимость (1.1) называют уравнением движения точки в векторной форме. Начало радиус-вектора движущейся точки находится в точке О, а конец его перемещается по траектории вместе с точкой М. Геометрическое место концов радиус-вектора, т.е. годограф этого вектора, определяет траекторию движущейся точки.
Координатный способ. С телом отсчета связывают прямоугольную систему декартовых координат, при этом положение точки определяют ее координатами, которые являются скалярными функциями времени (рис. 1.2):

 (1.2)
(1.2)
Уравнения (1.2) называют уравнениями движения точки в координатной форме. Они являются параметрическими уравнениями траектории точки. Исключив из этих уравнений параметр – время, можно получить уравнение траектории.
Между способами задания движения точки имеется связь. Так, если начало декартовой системы координат совпадает с центром, из которого проводится радиус-вектор точки при векторном способе изучения ее движения (см. рис. 1.2), то координаты точки равны проекциям на соответствующие оси радиус-вектора точки
 ,
,
где  – единичные орты координатных осей.
– единичные орты координатных осей.
Естественный способ. Этот способ используют в тех случаях, когда заранее известна траектория точки. На траектории выбирают неподвижную точку О (начало отсчета), а также положительное и отрицательное направления отсчета расстояний точки от начала отсчета (рис. 1.3). Тогда положение точки М на траектории будет однозначно определяться зависимостью криволинейной координаты S = ОМ от времени
 (1.3)
(1.3)
 Связь между координатным и естественным способами определяется выражением
Связь между координатным и естественным способами определяется выражением
 ,
,
где  – первые производные от координат точки по времени; С – постоянная интегрирования, зависящая от начальных условий.
– первые производные от координат точки по времени; С – постоянная интегрирования, зависящая от начальных условий.
Источник
Способы задания движения точки
Чтобы задать движение точки, надо задать ее положение по отношению к выбранной системе отсчета в любой момент времени. Для этого задания можно применять один из трех способов: естественный, координатный, векторный.
1. Естественный способ задания движения точки
Естественным способом задания движения пользуются в тех случаях, когда траектория движущейся точки известна заранее. Непрерывная линия, которую описывает движущаяся точка относительно данной системы отсчета, называется траекторией точки. Если траектория является прямой линией, то движение точки называется прямолинейным, а если кривой линией – то криволинейным.
Пусть точка  движется относительно системы отсчета вдоль некоторой траектории
движется относительно системы отсчета вдоль некоторой траектории  (рис. 40). Выберем на этой траектории какую-нибудь неподвижную точку
(рис. 40). Выберем на этой траектории какую-нибудь неподвижную точку  , которую примем за начало отсчета, а затем, рассматривая траекторию как координатную ось, установим на ней положительное и отрицательное направление, как на обычной координатной оси.
, которую примем за начало отсчета, а затем, рассматривая траекторию как координатную ось, установим на ней положительное и отрицательное направление, как на обычной координатной оси.
Тогда положение точки  на траектории будет однозначно определяться криволинейной координатой
на траектории будет однозначно определяться криволинейной координатой  , равной расстоянию от точки
, равной расстоянию от точки  до точки
до точки  , измеренному вдоль дуги траектории и взятому с соответствующим знаком. При движении точка
, измеренному вдоль дуги траектории и взятому с соответствующим знаком. При движении точка  будет перемещаться вдоль траектории, следовательно, расстояние
будет перемещаться вдоль траектории, следовательно, расстояние  будет с течением времени изменяться. Чтобы определить положение точки на траектории в любой момент времени, надо знать зависимость вида:
будет с течением времени изменяться. Чтобы определить положение точки на траектории в любой момент времени, надо знать зависимость вида:
 . (13)
. (13)
Это уравнение выражает закон движения точки. Таким образом, чтобы задать движение точки естественным способом, необходимо знать:
1. Траекторию движения точки;
2. Начало отсчета на траектории с указанием положительного и отрицательного направлений отсчета;
3. Закон движения точки вдоль траектории  .
.
Следует отметить, что величина  определяет положение точки, а не пройденный ей путь. Например, если точка, двигаясь из начала отсчета
определяет положение точки, а не пройденный ей путь. Например, если точка, двигаясь из начала отсчета , доходит до положения
, доходит до положения  , а затем, двигаясь в обратном направлении, приходит в положение
, а затем, двигаясь в обратном направлении, приходит в положение  , то в этот момент ее координата
, то в этот момент ее координата  , а пройденный за это время путь будет равен
, а пройденный за это время путь будет равен .
.
2.Координатный способ задания движения точки
В этом случае положение движущейся точки в пространстве определяют тремя ее декартовыми координатами относительно выбранной неподвижной прямоугольной системы (рис. 41). При движении точки эти координаты являются однозначными и непрерывными функциями времени, т.е. уравнения движения получают в виде
 ,
,  ,
, .(14)
.(14)
При координатном способе задания движения точки траектория в непосредственном виде не дается, но может быть получена из уравнений движения. Исключая из уравнений движения время, получаем два соотношения между координатами  , которые определяют линию, описываемую в пространстве движущейся точкой, т.е. ее траекторию.
, которые определяют линию, описываемую в пространстве движущейся точкой, т.е. ее траекторию.
Если движущаяся точка остается за все время движения в одной и той же плоскости, то, приняв эту плоскость за координатную  , получаем два уравнения движения
, получаем два уравнения движения ,
, .
.
Уравнения движения точки в координатной форме представляют собой уравнение траектории в параметрической форме, где за независимый параметр принято время. Исключая его из уравнений движения, получаем уравнение траектории.
При движении точки в плоскости можно пользоваться не только декартовыми координатами. В этом случае можно ввести в рассмотрение полярные координаты (рис. 42).
Положение точки в этом случае будут определять полярными координатами  и
и , т.е. уравнения движения точки вполярных координатах имеют вид
, т.е. уравнения движения точки вполярных координатах имеют вид  .
.
Тут вы можете оставить комментарий к выбранному абзацу или сообщить об ошибке.
Источник
Координатный способ задания движения точки
Введение
Выводы приведенных ниже формул и изложение теории приводится на странице “Кинематика материальной точки”. Здесь мы применим основные результаты этой теории к координатному способу задания движения материальной точки.
Пусть мы имеем неподвижную прямоугольную систему координат с центром в неподвижной точке . При этом положение точки M однозначно определяются ее координатами (x, y, z). Координатный способ задания движения точки – это такой способ, при котором заданы зависимости координат от времени. То есть заданы три функции от времени (при трехмерном движении):
Далее мы приводим формулы вычисления кинематических величин и пример решения задачи для координатного способа задания движения.
Определение кинематических величин
Зная зависимости координат от времени , мы автоматически определяем радиус-вектор материальной точки M по формуле:
,
где – единичные векторы (орты) в направлении осей x, y, z .
Дифференцируя по времени , находим проекции скорости и ускорения на оси координат:
;
;
Модули скорости и ускорения:
;
.
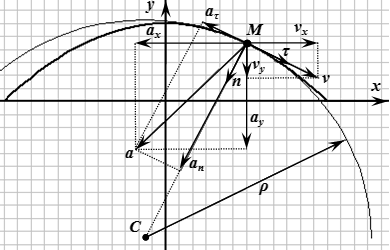
Единичный вектор в направлении касательной к траектории:
.
Его можно определить двумя способами – по направлению скорости, или в противоположную сторону. Поэтому здесь в знаменателе стоит не модуль скорости, а алгебраическая величина скорости, которая, по абсолютной величине, равна модулю скорости, но может принимать как положительные, так и отрицательные значения: . Она является проекцией скорости на направление единичного вектора .
Алгебраическая величина тангенциального (касательного) ускорения – это проекция полного ускорения на направление единичного вектора касательной к траектории:
.
Вектор тангенциального (касательного) ускорения:
.
Здесь также, как и для скорости, – это скалярная величина, которая может принимать как положительные так и отрицательные значения: .
Нормальное ускорение:
.
Вектор нормального ускорения:
; .
Единичный вектор в направлении главной нормали траектории (то есть единичный вектор, перпендикулярный касательной и направленный к центру кривизны траектории):
.
Здесь – это модуль нормального ускорения: . Нормальное ускорение всегда направлено к центру кривизны траектории. Оно не может быть направлено в противоположную сторону.
Радиус кривизны траектории:
.
Центр кривизны траектории:
.
Единичный вектор в направлении бинормали:
.
Пример решения задачи
Определение скорости и ускорения точки по заданным уравнениям ее движения
По заданным уравнениям движения точки установить вид ее траектории и для момента времени найти положение точки на траектории, ее скорость, полное, касательное и нормальное ускорения, а также радиус кривизны траектории.
Уравнения движения точки:
, см;
, см.
Решение
Определение вида траектории
Исключаем время из уравнений движения. Для этого перепишем их в виде:
; .
Применим формулу:
.
;
;
;
.
Итак, мы получили уравнение траектории:
.
Это уравнение параболы с вершиной в точке и осью симметрии .
Поскольку
, то
; или
.
Аналогичным образом получаем ограничение для координаты :
;
;
Таким образом, траекторией движения точки является дуга параболы
,
расположенная при
и .
Строим параболу по точкам.
| 0 | 6 |
| ± 3 | 5,625 |
| ± 6 | 4,5 |
| ± 9 | 2,625 |
| ± 12 | 0 |
Определяем положение точки в момент времени .
;
.
Определение скорости точки
Дифференцируя координаты и по времени , находим компоненты скорости.
.
Чтобы продифференцировать , удобно применить формулу тригонометрии:
. Тогда
;
.
Вычисляем значения компонент скорости в момент времени :
;
.
Модуль скорости:
.
Определение ускорения точки
Дифференцируя компоненты скорости и по времени , находим компоненты ускорения точки.
;
.
Вычисляем значения компонент ускорения в момент времени :
;
.
Модуль ускорения:
.
Алгебраическая величина тангенциального ускорения – это проекция полного ускорения на направление единичного вектора касательной к траектории. Выберем направление совпадающим с направлением скорости . Тогда ; алгебраическая величина тангенциального ускорения – это проекция полного ускорения на направление скорости :
.
Поскольку , то вектор тангенциального ускорения направлен противоположно скорости .
Нормальное ускорение:
.
Вектор и направлен в сторону центра кривизны траектории.
Радиус кривизны траектории:
.
Траекторией движения точки является дуга параболы
; .
Скорость точки: .
Ускорение точки: ; ; .
Радиус кривизны траектории: .
Определение остальных величин
При решении задачи мы нашли:
вектор и модуль скорости:
; ;
вектор и модуль полного ускорения:
; ;
тангенциальное и нормальное ускорения:
; ;
радиус кривизны траектории: .
Определим остальные величины.
Единичный вектор в направлении касательной к траектории:
.
Вектор тангенциального ускорения:
.
Вектор нормального ускорения:
.
Единичный вектор в направлении главной нормали:
.
Координаты центра кривизны траектории:
.
Введем третью ось системы координат перпендикулярно осям и . В трехмерной системе
; .
Единичный вектор в направлении бинормали:
.
Автор: Олег Одинцов . Опубликовано: 22-02-2016 Изменено: 29-01-2020
Источник



