
- Классификация по способу передачи сигналов управления, по стабильности и алгоритму управления.
- Способы передачи управления между программными объектами
- Применение
- 9. Классификация сар по способу передачи сигналов управления, по стабильности параметров и алгоритму функционирования.
- 10.Виды схем, использующиеся в сау.
- 11. Понятие о схеме электрической принципиальной (определение, назначение, пример).
Классификация по способу передачи сигналов управления, по стабильности и алгоритму управления.




![]()
![]()
По хар-ру передачи сигнала:
1) непрерывные системы (в процессе упр.сигнал не прерывается)
2) дискретные сист(в процессе упр.сигнал прерывается)
По хар-ру процесса управления :
1) Сист с детерминированными параметрами – у кот. в проц-ссе упр. парам. состояние элементов САУ не измен.
2) Стохастические САУ – в кот. параметры (управления ) элементов в процессе упр. могут изм (функции времени или др. параметры)
По хар-ру функционирования сист.:
1) Обычные САУ – замкнутые САУ с неизм. парам. вход. в САУ могут быть неприрывн., дискретными , релейными.
2) Адаптивные САУ – существует много методов адптации:
а)самонастривающ. САУ (сами изм. коэф. сист.)
б)самоорганизуещие сист (процессе упр автом изм свою структ)
в) самоалгоритмизирующиеся ( автом изм алгоритм своего функц-я)
г)экстремальные ( сист, кот автоматически находят точку экстремума хода тех процесса)
3)терминаьные САУ (на базе ЭВМ)
По наличию статической ошибки регулирования:
1) Статическая САР – обязательно имеет статич ошибку, может только уменьшать ошибку рег-я, но ликвидировать
2)Астатическая САР – не имеет статич ошибки, она способна полностью компенсировать действия возмущения и свести стат ошибку к 0.
10. Виды схем, использующихся в ТАУ.
1) Схема электрическая принципиальная
2) Схема функциональная
3) Схема структурная
1) СЭП дает полное представление о принципе работы установки, о составе элементов схемы САУ и их взаимодействии. СЭП выполняется в соответствии с ЕСКД(единая система конструкторской документации).ЕСКД регламентируется ГОСТом. По этой системе все элементы, входящие САУ.
2) СФ в ТАУ используется в построении структурной схемы. На этой схеме выполняется ход сигналы упр. и элементы зи кот строится САУ. (Не охвачена ЕСКД и не является элементом рабочей документации, выполняется в виде рисунка)
3) СС служит для изучения динамических свойств САУ. Элементами САУ являются динамические звенья и сумматоры. Динамические схемы изображаются в виде прямоугольников, имеющих входящую и выходящую стрелки. Стрелки показывают направления прохождения сигнала.
11. Понятие о схеме электрической принципиальной (определение, назначение, пример)
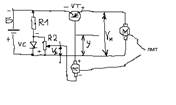
М — электрическая машина
VT – регулятор напр машины- транзистор
R1- параметрический стабилизатор напряжения
ТГ – датчик скорости вращения машины – тахогенератор
Принцип работы:R2 задается скорость двигателя, при вращении изменяется М , двигатель уменьшает обороты на одном валу присоединен ТГ, скорость его уменьшается. ТГ выдает напряжение , проп-ое ск-ти вращения Етг=кw – напр. обратной связи, напр. задания сравн. с напр. обр. связи они включены встречно. При этом транзистор открывается больше, т.е. пропускает большее напряжение на двигатель, кот. увеличивает скорость, компенсирует (напряжение) изменение М.
12.Понятие о схеме функциональной .
Одним из этапов анализа и синтеза САР является разработка функциональной схемы. За основу берется схема электрическая схема принципиальная.
ТГ вкл в схему т.о. что осуществляется гальваническое суммирование напр. тахогенератора Етг . Этот гальв сумматор осущ вычитание , т.к. напр. задание и Етг вкл встречно.
В уст. режимах напр. задания всегда больше Етг.
На ФС нет электрических цепей. Стрелки указывают соед элементов между собой и напр. входа сигнала управления.
На ФС количество блоков может быть избыточным.Сигнал управления может проходить не через все элементы, поэтому для построения СС САР используются только те элементы, через кот. проходит сигнал управления.
Источник
Способы передачи управления между программными объектами
Программные объекты — это обыкновенные классы из ООП. Под взаимодействием программных объектов я буду подразумевать передачу управления из одного класса в другой.
Это можно сделать двумя способами. Далее я буду называть их: объектный и событийный. Названия взяты из объектно-событийной парадигмы, подразумевающей наличие объектов, запускающих и обрабатывающих какие-то события. Но в моем случае, смысл другой. Так же, чтобы не путаться, назовем первый класс, из которого управления передается управляющим, второй класс, принимающий управление, соответственно, исполнителем.
Так как я привык работать с языком C# и .NET Framework, то в примерах и объяснениях я буду использовать именно их. Сразу стоит сказать, что в C# механизм событий реализован через делегаты — указатели на метод с заранее оговоренным интерфейсом. Для этих же целей подойдут паттерн Command или Observer. Несмотря на отличия в реализации, они равны по смыслу. Оба выполняют одну задачу — оповещают о событии неизвестного подписчика или подписчиков.
Я рассмотрю ситуацию, когда только один из объектов знает о другом. Еще возможны варианты — оба знают друг о друге (сильная связанность классов), или никто не знает ни о ком (универсальность, применение паттерна Facade и др).
Описание
Объектный способ означает, что один класс (исполнитель) предоставляет наружу через свой интерфейс какой-то метод. Второй (управляющий), имея ссылку на экземпляр исполнителя, может вызывать этот метод. При этом происходит передача управления из первого объекта во второй. Вот пример на языке C# (владеющие С++, Java, думаю, тоже поймут):
//исполнитель
class Worker <
public void doWork() <
//.
>
>
//управляющий
class Boss <
Worker worker1 = new Worker();
Worker worker2 = new Worker();
public void startProject() <
worker1.doWork();
worker2.doWork();
>
>
Как видно, класс Worker ничего не знает о том, кто заставил его работать, кому он принадлежит. С другой стороны, Boss прекрасно представляет себе, что за рабочие у него в подчинении, сколько их и какие работы они могут выполнять. Резюмируя: класс-управляющий (Boss) знает интерфейс класса-исполнителя (Worker), но не наоборот. Управляющий при этом должен знать количество исполнителей. 
Событийный способ передачи управления работает немного по-другому. Один класс через свой интерфейс объявляет о том, что он может инициировать какие-то события. Другой класс, зная об этом, может на эти события подписаться и обрабатывать их в случае их возникновения.
//исполнитель
class Worker <
public Worker(Boss boss) <
boss.projectStarted += new EventHandler(doWork);
>
private void doWork(object sender, EventArgs e) <
//.
>
>
//управляющий
class Boss <
public event EventHandler projectStarted;
public void startProject() <
if (projectStarted != null)
projectStarted.Invoke(this, new EventArgs());
>
>
Теперь же класс Boss ничего не знает о том, кто будет исполнять его команды, он просто объявляет событие “projectStarted”. Те же, кто хочет выполнить свою работу (класс Worker), совершенно точно знают, на кого они работают. Конкретный экземпляр Worker будет исполнять свою работу только при команде конкретного экземпляра Boss. В противоположность объектному подходу, исполнитель знает интерфейс управляющего, а управляющий ничего не знает об исполнителях и их количестве.
Применение
Проблема применения соответствующего подхода встала при реализации Model-View-Controller. Управление из контроллера передается в представление и мне нужно было решить, кто о ком должен знать: Controller о View или View о Controller?
Для начала посмотрим на то, как это реализовано у других. Возьмем какой-нибудь UI Control из библиотеки WinForms (да простят меня приверженцы других UI-фреймворков), например, Button.
Первое, что приходит в голову, когда мы думаем о кнопках — это событие Click(). В подавляющем большинстве случаев именно для обработки кликов мы их и используем. В событийном подходе события инициируются управляющим. Значит, кнопка из WinForms, когда ей нужно передать управление, является управляющим. Теперь взглянем на ее методы, например свойство Title. Оно отвечает за надпись, которую мы видим на кнопке во время работы приложения. Кнопка предоставляет методы для работы с собой через свой интерфейс и, следовательно, играет роль исполнителя. Как же так, кнопка и исполнитель и управляющий? Почему бы и нет? К тому же кнопка даже называется соответственно — UI Control. С одной стороны она UI, т.е. представление-исполнитель, с другой, она Contol, т.е. контроллер-управляющий.
При проектировании класса кнопки у нас есть одна проблема — мы не знаем, куда кнопка может передавать управление и откуда она его может получать. Но поведение реализовать нужно. Позволю себе сформулировать очевидный вывод, который тем не менее, позволяет лучше понять природу дизайна системы. Передавая управление в неизвестность, мы используем событийный механизм, получая управление из неизвестности мы используем механизм объектный.
Картинка для лучшего восприятия:
Но это очевидность касается только “неизвестности”. А что же делать, если мы проектируем обе части и у нас нет неизвестности? Надо придумать себе неизвестность. Но какой подход выбрать? Я пришел к выводу, что любой. Все зависит от того, откуда мы начинаем проектировать дизайн, что для нас первично.
Вернемся к разговору про View и Controller. Например, мы пишем систему вывода статистической информации на экран в виде графиков. Именно задача рисования красивых графиков первична — т.е. первичен исполнитель. Далее представляем, что сама статистика для нас не важна (хотя, на самом деле это может быть совершенно не так) и представляем, что управление передается из неизвестности. Следовательно, применяем объектный подход — описываем для View методы рисования графиков, передаем ссылку на View в Controller, и из контроллера в нужных местах производим вызовы методов.
Другоая ситуация — нам важна статистика (управляющий), а как она будет представлена, уже вторично. Теперь для нас неизвестность — это то, как будет статистика отображаться. Применяем событийный подход. Описываем события и делаем их инициацию в нужных местах. Теперь для нас не важно, кто и как их обработает. Модуль рисования графиков при этом сам подписывается на нужные события.
В первом случае удобнее вызывать рисование графиков для разных видов информации, например, не только статистику, но и оперативные данные. Т.е. использование разных контроллеров для одного представления не вызывает трудностей. Во втором же наоборот, мы можем нашу статистику рисовать (причем одновременно) и в виде красивых графиков, и в виде облака значений и любыми другими способами. Другими словами, для одного контроллера легко задать несколько представлений.
Источник
9. Классификация сар по способу передачи сигналов управления, по стабильности параметров и алгоритму функционирования.
1.по характеру передачи сигнала управления:
1.1.Непрерывные САУ. Сигнал управления передается на ОУ не прерываясь.
1.2.Дискретные САУ (импульсные, цифровые). Сигнал управления при передаче прерывается на некоторое время.
1.3.Релейные САУ. Имеют существенную нелинейность.

2.по стабильности параметров динамических звеньев САУ:
2.1.Системы с детерминированными параметрами. Коэффициенты диф. уравнений неизменны,стабильны.
2.2.Стохастические САУ. Коэффициенты диф. уравнений могут изменяться со временем.
3.по характеру функционирования:
3.2.Адаптивные САУ. Содержат контур адаптации. Приспосабливаются к условиям ведения тех. процесса.
а) Самонастраивающиеся САУ. Подстраивают свои коэффициенты звеньев с таким расчетом, чтобы компенсировать действия возмущений тех. процессов. Эти возмущения, как правило, параметрические.
б) Самоорганизующиеся САУ. Подстраивают свою структурную схему с тем, чтобы компенсировать действия возмущения ОУ.
в) Самоалгоритмизирующиеся САУ. Эти САУ изменяют свой алгоритм управления с целью компенсации действий возмущений ОУ (у+∆y=кх, где ∆y — возмущения)

г) Экстремальные САУ. Эти САУ находят экстремальные значения звеньев и работают в этой точке.
д)Терминальные системы. Компьютерная САУ. Компьютер управляет объектом.
10.Виды схем, использующиеся в сау.
1) Схема электрическая принципиальная
2) Схема функциональная
3) Схема структурная
1) СЭП дает полное представление о принципе работы установки, о составе элементов схемы САУ и их взаимодействии. СЭП выполняется в соответствии с ЕСКД(единая система конструкторской документации).ЕСКД регламентируется ГОСТом. По этой схеме м-но опред-ть все элементы, входящих в САУ. ххх ххх ххх эз. На схеме есть перечень элементов, входящих в систему.
2) СФ в ТАУ используется в построении структурной схемы. (Не охвачена ЕСКД и не является элементом рабочей документации, выполняется в виде рисунка) в прямоугольнике указ-ся название.направление действия сигнала.явл-ся предшественником структурной схемы.
примечание: в ЕСКД имеется схема с созвучным названием : сх. электрич-я функцион-ая- указ-ся электрические элементы отдельных функц-х элементов.
3) СС служит для изучения динамических свойств САУ. (для анализа и синтеза САУ: анализ — анализ устойчивости САР, синтез – выбор КУ). Элементами САУ являются динамические звенья и сумматоры.Динамич-е звенья опис-ся диф-ые уравн-ями в операторной форме. Динамические схемы изображаются в виде прямоугольников, имеющих входящую и выходящую стрелки. Стрелки показывают направления прохождения сигнала.Динамические звенья опис-ся дифурами в операторной форме.
примеч-е: в сист-е ЕСКД сх. электрич-ая структурная содержит электрич-е связи м/у элементами в структуре.Тау эту схему не использует.
11. Понятие о схеме электрической принципиальной (определение, назначение, пример).
СЭП дает полное представление о принципе работы установки, о составе элементов схемы САУ и их взаимодействии. Можно определить весь состав элементов, входящих в САУ.СЭП выполняется в соответствии с ЕСКД(единая система конструкторской документации).ЕСКД регламентируется ГОСТом. По этой схеме м-но опред-ть все элементы, входящих в САУ. ххх ххх ххх эз
СЭП САР скорости электродвигателя постоянного тока:

Б – батарея – источник энергии, тока
R1 – постоянный резистор
R2 – переменный резистор
Мех – механизм, вращающий двигатель
Uб – напряжение батареи
Uз – напряжение задания скорости вращения механизма
Uvc-стабилизированное напряж-е стабилитрона.
w-угловая частота вращ-я.
Uос – напряжение обратной связи
Принцип работы схемы:
заданная скорость вращения двигателя задается величиной wз –> Uз. Двигатель должен вращаться с неизменной скоростью. Под действием момента сопротивления скорость двигателя может изменяться ∆w=10% от min, то звук будет неестественным. Поэтому к двигателю механически подключен тахогенератор вместе с изменением скорости машины, изменяется и направление ТГ.
↓Uтг = Ктг*w↓. Напряжение тахогенератора включено встречно напряжению задания.
Uу = Uз – Uтг. w↓=>↓Uтг=> Uу↑ тем самым отпирает транзистор VT.При отпирании Uдв возрастает. w = Kдв*Uдв
Назначение элементов схемы:
R1, VC – источник стабил-го напряжения.
Стабилизатор напряжения обеспечивает стабильность задающего напряжения.
R2 – резистор задатчик, задается величина скорости, при которой должен работать двигатель.
ТГ – тахогенератор, датчик о.с., датчик скорости вращения двигателя.Датчик преобразует мех. Величину вращения скорости в напряжение.
VT – устройство регулирования напряжения двигателя (преобразователь энергии).Преобразует энергию батареи в регулировочную эл. Энерг., подаваемую на двигатели. Двигатель- преобразует электрическую энергию в механическую.
12. Понятие о схеме функциональной (определение, назначение, пример).
1.Б – блок питания
4.датчик скорости, обратной связи
5.преобразователь энергии – транзистор
Принцип построения: 
1.выделяются все функцио-ные блоки, рис-ся прямоуг-ки.
2.соединяются стрелочками, стрелки показывают направление прохождения энергии и сигнала управления.
Фун. сх-ма используется для построения структурной схемы.
13.Схема структурная (определение, назначение, пример).
лементами являются динамические звенья. Динамическое звено имеет один вход, один выход, на входе – управляющее воздействие, на выходе – выходная координата.

В прямоугольнике обознач. передаточная функция. Передаточ. функция показывает связь выходной координаты и управляющей, выраж. в операторной форме.
Y(p) = X(p)W(p) оператор Лапласа
Структурная схема- строгое мат.-ое описание управляющей и выходной координаты, представленное в графическом виде.
Структурная схема забирает из динамической элементы через которые проходит сигнал управления.

механизм, двигатель, ПЭ, С, ТГ
Звенья стр. сх. называют динамич. звеньями или элементарными звеньями. Элемент. звено имеет один вход, один выход. Выход. координата влияет на управляющую.
14. Статические характеристики звеньев САР.
СХ устанавливают связь между управляющей корд. Вых. Коод. В установившихся режимах.
Т.е. статическая хар-ка характеризуется коэф передачи звена.Он опр-ся как отнош-е приращение вых координаты к соотв приращ входн. Показывает наклон прямой.
Статич хар-ка не учитывает пер процессов. Она опр. По установл. Значениям у и х.
коэф передчи элемент звена определяется по его регулировочной хар-ке.
Перех. Из одного сост-я в др сост. Наз-ся перех. Процессом.Сост-е ОУ после окончания перех. Проц. наз-ся установившимся режимом.
Регулировочная хар-ка –это зависимость вых. Коорд от управляющей коорд. В установшихся реж-х.
Линеаризация-регулировочная хар-ка, превращ-е прямой в кривую.
Тут вы можете оставить комментарий к выбранному абзацу или сообщить об ошибке.
Источник



