
- СПОСОБЫ СНИЖЕНИЯ ШУМА
- Уменьшение шума различными способами
- Введение в проблему подавления шума
- Обзор существующих методов
- Линейное усреднение пикселей
- Медианная фильтрация
- Математическая морфология
- Гауссовское размытие
- Методы на основе вейвлет-преобразования
- Метод главных компонент
- Анизотропная диффузия
- Фильтры Винера
- Литература
СПОСОБЫ СНИЖЕНИЯ ШУМА
Из выражений для акустического расчета следуют основные способы снижения шума: уменьшение шума в источнике, изменение направленности излучения, рациональная планировка, акустическая обработка помещений и уменьшение шума на пути распространения.
Уменьшение шума в источнике – наиболее рациональный способ снижения шума. Для снижения механического шума на этапе проектирования оборудования и технологических процессов рекомендуется заменять ударные процессы и механизмы безударными, например, штамповку – прессованием, клепку – сваркой, возвратно-поступательное движение механизмов – равномерно-вращательным. Применение косозубых зубчатых передач вместо прямозубых дает снижение шума механизмов примерно на 5 дБ. Повышение точности изготовления деталей, уменьшение зазоров снижают шум на 5-10 дБ. Замена подшипников качения на подшипники скольжения уменьшает шум на 10-15 дБ. Заменой металлических деталей на пластмассовые, текстолитовые или капроновые можно уменьшить шум на 10-15 дБ.
При выборе материала для изготовления деталей необходимо учитывать, что внутреннее трение в различных металлах неодинаково, а следовательно, и различна звучность. Например, чугун менее звучный, чем сталь. Сплавы меди, марганца, магниевые обладают высоким внутренним трением. В процессе эксплуатации необходимо исключить вибрацию путем балансировки вращающихся деталей, применением виброизоляции, прокладок и упругих вставок в соединениях и т.д.
Аэродинамический шум, возникающий в результате нестационарных процессов в воздухе, при работе систем охлаждения или пневмосистем уменьшают путем снижения скорости воздушного потока. Это достигается за счет рационального размещения вентиляторов, улучшением их аэродинамических характеристик, уменьшением скорости вращения и т.п.
Электромагнитный шум возникает вследствие колебаний элементов электрических устройств (трансформаторы) под действием переменного магнитного поля. Для снижения шума необходимо уменьшать магнитную индукцию, более плотно прессовать сердечники, применять оптимальные по мощности трансформаторы.
Акустическая обработка помещений – это установка звукопоглощающих облицовок и штучных звукопоглотителей из звукопоглощающих материалов (ЗПМ).
Интенсивность шума зависит не только от прямого, но и от отраженного звука. Рабочее место может оказаться в зоне преимущественно прямого звука, когда IПР >> IОТР (точка 1). В этом случае звукопоглощающая облицовка не дает эффекта DL = 0 (рис. 6.3).
|
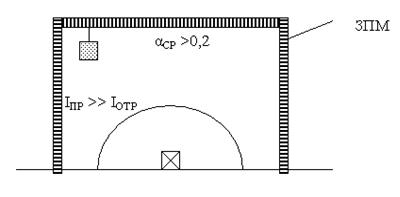
Рис. 6.3. Схема акустической обработки помещений
Когда расчетная точка находится в точке 2, где IПР = IОТР, можно путем звукопоглощения снизить шум на 2-3 дБ.
Максимальный эффект акустическая обработка помещений дает, когда расчетная точка будет в точке 3, где IПР
Для того, чтобы получить максимальное снижение шума, надо:
1) использовать звукопоглощающие материалы с коэффициентом поглощения aОБЛ = 0,6-0,2;
2) облицовывать как можно большую площадь (потолок и стены).
Свойствами поглощения звука обладают все строительные материалы. Однако ЗПМ принято называть те, у которых αОБЛ > 0,2 (кирпич, бетон имеют αОБЛ =0,01 – 0,05). Процесс поглощения звука происходит за счет перехода энергии колеблющихся частиц воздуха в теплоту вследствие потерь на трение в порах материала. Поэтому ЗПМ должен обладать пористой структурой, поры должны быть открыты со стороны падения звука и соединяться между собой (незамкнутые поры).
Наиболее распространенными звукопоглощающими материалами являются ультратонкое стекловолокно, плиты минераловатные, винипор, различные жесткие плиты на цементном связующем типа «Акмигран», «Силакпор» и другие.
Звукопоглощающие свойства пористого материала зависят от толщины слоя (в), частоты звука f (рис. 6.4).
Рис. 6.4. Зависимость звукопоглощения от толщины слоя ЗПМ (а) и частоты звука (б):
λ = cм /f – длина волны; См – скорость звука в материале
Толщина слоя определяется и должна быть 100 — 200 мм. Максимальное звукопоглощение обеспечивается для звуков средней и высокой частоты
(6-8 дБ). Для увеличения поглощения на низких частотах и для экономии материала между ЗПМ и стеной оставляется воздушный зазор. На эффективность звукопоглощающих облицовок влияет также высота и конфигурация помещения. Облицовка более эффективна при относительно небольшой высоте (4-6 м), в этом случае стены не облицовывают. В помещениях высоких и вытянутых облицовка стен дает больший эффект. Кроме того, акустическая обработка помещений меняет спектр шума в помещении за счет большей эффективности облицовок на высоких частотах. Шум делается более глухим и менее раздражающим, улучшается слышимость оборудования, речи.
Если потолок и стены выполнены из стекла, для снижения шума применяются штучные поглотители различных конструкций, подвешиваемые к потолку равномерно по помещению на определенной высоте.
Уменьшение шума на пути его распространения, реализуется также за счет применения звукоизолирующих ограждений, экранов и глушителей. Шум из помещения 1, где находится источник шума Iпроникает в тихое помещение 2 тремя путями (рис. 6.5):
1) через ограждение, которое под действием переменного давления падающей на него волны излучает шум в тихое помещение;
2) через неплотности и отверстия;
3) посредством вибраций, возбуждаемых в строительных конструкциях.
Рис. 6.5. Звукоизолирующее ограждение
В первом и во втором случаях возникают воздушные звуки; в третьем – структурные звуки. Сущность звукоизоляции заключается в том, что падающая на ограждение звуковая энергия отражается в гораздо большей степени, чем проникает через него. Звукоизолирующие свойства ограждения характеризуются коэффициентом звукопроницаемости τ :
 |
где IПР – интенсивность проникающего звука; IПАД – интенсивность звука падающего на ограждение.
Эффективность звукоизоляции определяется по формуле
 |
На основании теоретических и практических исследований установлено, что эффективность звукоизоляции однослойного ограждения можно определить следующим образом:
 |
где m – масса 1 м 2 ограждения; f – частота звука, Гц.
Из уравнения следуют два важных вывода:
1) звукоизоляция тем выше, чем тяжелее ограждение, она меняется по так называемому закону массы:
 |
где m1 и m2 – начальная и конечная массы ограждения, т.е. при увеличении массы ограждения в 2 раза эффективность звукоизоляции возрастает на 6 дБ.
2) звукоизоляция одного и того же ограждения возрастает с увеличением частоты. Причем с увеличением частоты вдвое она возрастает на 6 дБ:
 |
где f1 и f2 – частоты звука, на которых определяется эффективность звукоизоляции.
Более эффективным способом повышения звукоизоляции является применение многослойных ограждений. В этом случае ограждение представляет собой конструкцию, составленную из нескольких жестких и упругих слоев. Упругим слоем может быть и воздушная прослойка, заполненная ЗПМ. Наличие неплотностей и отверстий в ограждении резко снижает звукоизоляцию.
Метод звукоизоляции является более эффективным по сравнению с методом звукопоглощения, когда необходимо снизить шум в помещениях, соседних с помещением источника шума. При этом звукоизоляция снижает шум на
25-30 дБ.
Звукоизолирующие кожухи применяются для изоляции наиболее шумных машин и механизмов. Кожухи изготавливаются обычно из дерева, металла и пластмассы. Внутреннюю поверхность кожуха облицовывают звукопоглощающим материалом. Очень важно исключить при этом все неплотности и отверстия. Кожух должен плотно закрывать источник шума. Для отвода теплоты кожухи снабжают вентиляционными устройствами с глушителями.
Экраны используются для защиты работающих от непосредственного (прямого) шума. Они устанавливаются между источником шума и рабочим местом (рис. 6.6).
Рис. 6.6. Акустический экран
Акустический эффект экрана основан на образовании за ним области тени, куда звуковые волны проникают лишь частично. Эффективность экрана зависит от длины волны: чем больше длина волны, тем меньше область тени за экраном. Поэтому их применяют в основном для защиты от высокочастотных шумов. Важно также расстояние от источника шума до экранируемого рабочего места, чем оно меньше, тем больше эффективность экрана. Экран оказывается эффективным тогда, когда отсутствуют отраженные волны (т.е. либо на открытой местности, либо в облицованном помещении). Для повышения эффективности экраны облицовывают звукопоглощающим материалом. В шумных цехах пульты управления размещаются в звукоизолированных кабинах.
Для снижения аэродинамического шума применяются глушители шума. Выбор глушителя зависит от спектра шума, величины требуемого снижения шума, конструкции установки и условий ее работы. Применяются глушители двух типов: абсорбционные (активные) и реактивные.
Активные глушители – это глушители, в которых используется звукопоглощающий материал (трубчатого типа и пластинчатые) (рис. 6.7).
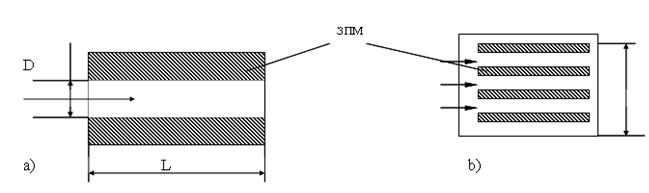
Рис. 6.7. Трубчатый (а) и пластинчатый (б) глушители
Абсорбционные глушители обеспечивают снижение шума на 25-30 дБ в широком диапазоне частот. Они применяются в вентиляционных, компрессорных, газотурбинных установках.
Глушители реактивного типа применяются для снижения шума с ярко выраженными дискретными составляющими. Это шум ДВС, поршневых компрессоров и т.п. Реактивные глушители устанавливаются на трубопроводах сравнительно небольших размеров, когда длина волны звука значительно больше диаметра трубопровода (рис. 6.8 и 6.9).
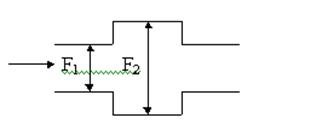
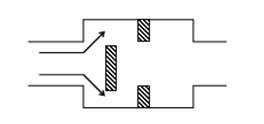
Рис. 6.8. Камерный глушитель Рис. 6.9. Экранный глушитель
Эффективность камерных глушителей зависит от степени расширения (F1/ F1). В экранных глушителях звук отражается обратно к источнику.
Для снижения шума в широком диапазоне частот применяют комбинированные глушители, в конструкции которых имеются элементы активных и реактивных глушителей.
Средства индивидуальной защиты (СИЗ)
Средства индивидуальной защиты применяются в тех случаях, когда другие способы защиты малоэффективны, это крайняя мера защиты. Обычно их используют на таких операциях, как ковка, штамповка, зачистка, испытание ДВС. К СИЗ относятся: вкладыши (мягкие тампоны) DL =5 – 20 дБ, наушники при f = 1000 Гц – до 22 дБ, шлемы при шуме > 120 дБ. Эффективность СИЗ от шума увеличивается с ростом частоты звука.
Дата добавления: 2017-01-29 ; просмотров: 4187 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Источник
Уменьшение шума различными способами
Зачем нужно подавлять шум? Чаще всего шумоподавление служит для улучшения визуального восприятия, но может также использоваться для каких-то специализированных целей — например, для увеличения четкости изображения, в качестве предобработки для последующего распознавания, при сжатии видеопоследовательностей и изображений.
Введение в проблему подавления шума
Компьютерная графика разделяется на три основных направления: визуализация, обработка изображений и распознавание образов.
Визуализация — это создание изображения на основе некоего описания (модели). К примеру, это может быть отображение графика, схемы, имитация трехмерной виртуальной реальности в компьютерных играх, в системах архитектурного проектирования и т.п.
Основная задача распознавания образов — получение семантического описания изображенных объектов. Цели распознавания могут быть разными: как выделение отдельных элементов на изображении, так и классификация изображения в целом. В какой-то степени задача распознавания является обратной по отношению к задаче визуализации. Области применения — системы распознавания текстов, создание трехмерных моделей человека по фотографиям и т.п.
Обработка изображений отвечает за преобразование (фильтрацию) изображений. Примерами могут служить повышение контраста, резкости, коррекция цветов, сглаживание. Задачей обработки изображения может быть как улучшение (восстановление, реставрация) изображения по какому-то определенному критерию, так и специальное преобразование, кардинально меняющее изображение. В последнем случае обработка изображений может быть промежуточным этапом для дальнейшего распознавания изображения (например, для выделения контура объекта).
Методы обработки изображения могут существенно различаться в зависимости от того, каким путем изображение было получено — синтезировано системой машинной графики, либо путем оцифровки черно-белой или цветной фотографии или видео.
В том случае, если изображение или видеопоследовательность были получены с помощью оцифровки, на них, как правило, присутствует шум. Проблема шумоподавления является одной из самых актуальных и распространенных проблем в области обработки как статичных изображений, так и видео.
Зачем нужно подавлять шум?
Чаще всего шумоподавление служит для улучшения визуального восприятия, но может также использоваться для каких-то специализированных целей — например, в медицине для увеличения четкости изображения на рентгеновских снимках, в качестве предобработки для последующего распознавания и т.п.
Также шумоподавление играет важную роль при сжатии видеопоследовательностей и изображений [25, 26]. И в видео, и в изображениях сжатие основано на пространственной корреляции значений пикселей, а в случае видео — еще и временной корреляции (на сходстве последовательно идущих кадров между собой). Одной из основных проблем в алгоритмах сжатия является определение локальной зашумленности данной области изображения, поскольку при сжатии сильный шум может быть принят за детали изображения, и это может, во-первых, привести к увеличению сложности с точки зрения сжатия и, во-вторых, отрицательно повлиять на результирующее качество сжатого изображения. При сжатии видеоизображений наличие шума приводит, кроме того, к увеличению межкадровой разницы, понижая, таким образом, степень сжатия, и отрицательно влияет на точность работы алгоритма компенсации движения [27].
Откуда же берется шум? Источники шума могут быть различными:
- неидеальное оборудование для захвата изображения — видеокамера, сканер и т.п.
- плохие условия съемки — например, сильные шумы, возникающие при ночной фото/видеосъемке
- помехи при передаче по аналоговым каналам — наводки от источников электромагнитных полей, собственные шумы активных компонентов (усилителей) линии передачи (пример — телевизионный сигнал)
- неточности (плохие фильтры) при выделении яркостного и цветоразностных сигналов из аналогового композитного сигнала и т. п.
Соответственно, шумы тоже бывают разных видов. Самые распространенные:
- белый шум — сигнал, отсчеты которого не коррелируют друг с другом, и его разновидность — белый гауссовский шум, который возникает, в частности, при плохих условиях приема сигнала и описывается следующей функцией плотности распределения амплитуд:
 ,
,
где d — амплитуда шума, а ? — параметр распределения - импульсный шум — случайные изолированные точки на изображении, значение которых значительно отличается от значений окружающих их точек (обычно возникает при передаче по аналоговым каналам).
- цветные пятна — характерны для аналогового сигнала (к примеру, присутствуют в видеоизображении, оцифрованном с видеокассет VHS).
 ,
, Менее распространенные виды шума — шум вида (как правило, вызывается помехами в электросети) и вертикальные царапины (характерны для старых черно-белых кинолент, возникают при механическом повреждении эмульсии на пленке).
Алгоритмы шумоподавления обычно специализируются на подавлении какого-то конкретного вида шума. Не существует пока универсальных фильтров, детектирующих и подавляющих все виды шумов. Однако многие шумы можно довольно хорошо приблизить моделью белого гауссовского шума, поэтому большинство алгоритмов ориентировано на подавление именно этого вида шума.
Шум в видеопоследовательности можно условно разделить на пространственный и временной. Временным шумом называют неприятный визуальный эффект, возникающий в видео из-за случайного или коррелированного изменения пространственного шума от кадра к кадру. В некоторых источниках под временным шумом понимают любое случайное изменение значений каждого пиксела во времени, в том числе смену яркости от кадра к кадру. Соответственно, фильтры шумоподавления также делятся на пространственные и временные: первые производят усреднение пикселей по каждому отдельному кадру (изображению), а вторые — между несколькими последовательно идущими кадрами. Во временных фильтрах часто используются алгоритмы детектирования и/или компенсации движения. На практике обычно используется сочетание пространственного и временного методов шумоподавления — так называемый, 3D-фильтр. При этом в большинстве существующих алгоритмов первым применяется пространственный фильтр, поскольку после его работы процедура обнаружения движения во временном фильтре становится проще и точнее, и, как следствие, временное шумоподавление становится более эффективным. Хотя обратный порядок применения тоже имеет свои преимущества: временной фильтр, как правило, работает довольно бережно; проработав вначале, он понизит общий уровень шума и предотвратит излишнее размытие, характерное для любого пространственного фильтра.
Основная проблема при пространственном шумоподавлении заключается в том, чтобы не испортить четкость краев предметов на изображении, а также мелкие детали, соизмеримые по амплитуде с шумом. При шумоподавлении в видео подобные детали можно детектировать, отслеживая их на протяжении нескольких кадров.
Основной проблемой при временном шумоподавлении является эффект размытия движения ( ), возникающий при попытке усреднить пиксели вдоль границ движущихся объектов. Для устранения этой проблемы во временные методы часто встраивают алгоритм компенсации движения, но, во-первых, при этом значительно снижается скорость работы фильтра, а во-вторых, неточное нахождение блоков приводит к появлению артефактов.
Еще одной сложностью является оценка качества подавления шума. Как правило, оно оценивается следующим образом: на незашумленное изображение накладывается искусственный шум, затем полученное изображение фильтруется алгоритмом шумоподавления и сравнивается с исходным с помощью какой-нибудь метрики. Чаще всего для этой цели используют метрику PSNR (peak signal-to-noise ratio — пиковое соотношение сигнал/шум), которая определяется формулой:  ,
,
где xi, yi — i-е пиксели двух сравниваемых изображений, N — общее число пикселей на каждом изображении, а d(xi, yi) — разность между цветами соответствующих пикселей (для оттенков серого это просто разность значений пикселей, а для цветных изображений — евклидово расстояние между пикселями в трехмерном цветовом пространстве). Соответственно, чем ближе отфильтрованное изображение к оригинальному, тем больше значение PSNR, и тем выше считается качество работы алгоритма.
Однако эта и другие аналогичные метрики позволяют оценивать лишь среднеквадратичную разницу между изображениями, поэтому лучшие результаты с точки зрения метрики не всегда соответствуют наилучшему визуальному восприятию. К примеру, более размытое изображение, в котором вместе с шумом были удалены мелкие детали, может иметь значение PSNR выше, чем изображение с более аккуратно подавленным шумом. Визуальные оценки при этом покажут предпочтительность второго изображения.
При оценке качества работы временного алгоритма шумоподавления часто рассматривается межкадровая разница — чем меньше она становится после обработки видео фильтром шумоподавления, тем лучше считается качество этого фильтра.
Различные существующие на данный момент подходы к шумоподавлению будут рассмотрены далее.
Обзор существующих методов
Можно выделить следующие базовые подходы к пространственному шумоподавлению:
- Линейное усреднение пикселей по соседям
- Медианная фильтрация
- Математическая морфология
- Гауссовское размытие
- Методы на основе вейвлет-преобразования
- Метод главных компонент
- Анизотропная диффузия
- Фильтры Винера
Некоторые из этих методов применимы с небольшими модификациями также и во временной области.
Заметим, что алгоритмы на основе вейвлет-преобразования и метода главных компонент применяются, в основном, для обработки статичных изображений, хотя и обеспечивают наилучшее качество среди всех вышеперечисленных методов. Дело в том, что эти алгоритмы работают очень медленно и даже при хорошей оптимизации не могут обеспечить обработку в реальном времени, а при обработке видео скорость играет очень важную роль.
Рассмотрим каждый подход подробнее.
Линейное усреднение пикселей
Простейшая идея удаления шума — усреднять значения пикселей в пространственной окрестности. Для каждого пикселя анализируются соседние для него пиксели, которые располагаются в некотором прямоугольном окне вокруг этого пикселя (см. рисунок 2.1.1а). Чем больше взят размер окна, тем сильнее происходит усреднение. Самый простой вариант фильтрации — в качестве нового значения центрального пиксела брать среднее арифметическое всех тех его соседей, значение которых отличается от значения центрального не более чем на некоторый порог. Чем больше величина этого порога, тем сильнее происходит усреднение.
Вместо среднего арифметического соседей можно брать их взвешенную сумму, где весовой коэффициент каждого соседнего пиксела зависит либо от расстояния в пикселях от него до центрально пикселя, либо от разницы их значений.
Эти алгоритмы очень простые, но они не дают хорошего результата.
Интересная модификация этого метода была предложена Де Хааном 6. Он предложил в качестве значения центрального пикселя также брать взвешенную сумму соседних пикселей, только соседей брать не подряд, а через один или два пикселя (см. рисунок 2.1.1б). Утверждается, что при таком подходе удается подавить низкочастотный шум, который заметнее на глаз, чем высокочастотный.
 |  |
| Рисунок 2.1.1а. Обычный вид окна | Рисунок 2.1.1б. Вид окна в алгоритме Де Хаана |
Аналогично можно применять этот метод во временной области, только усреднение будет производиться уже между соседними кадрами, и окно соответственно будет браться по времени (то есть каждый пиксель будет усредняться по пикселям, расположенным в той же позиции в соседних кадрах). В общем виде такую схему шумоподавления можно выразить следующей формулой:  ,
,
где x — пиксель, а t — номер кадра. Веса  могут браться в зависимости от близости значений пикселей и расстояния между кадрами. Также усреднение может проводиться рекурсивно:
могут браться в зависимости от близости значений пикселей и расстояния между кадрами. Также усреднение может проводиться рекурсивно:  ,
,
где  — значение, посчитанное для этого пиксела в предыдущем кадре. Для предотвращения возникновения ореолов вокруг движущихся объектов, о которых было сказано выше, во временные фильтры встраивают алгоритмы определения движения. При этом возможно два варианта: простое детектирование движения (пикселы в движущихся блоках просто остаются без изменения, и шум вдоль движущихся объектов не подавляется) или построение скомпенсированного предыдущего и/или следующего кадра (см. [27]) и смешивание текущего с ним. В последнем случае компенсация движения должна быть выполнено качественно, иначе будут артефакты на месте неправильно найденных блоков.
— значение, посчитанное для этого пиксела в предыдущем кадре. Для предотвращения возникновения ореолов вокруг движущихся объектов, о которых было сказано выше, во временные фильтры встраивают алгоритмы определения движения. При этом возможно два варианта: простое детектирование движения (пикселы в движущихся блоках просто остаются без изменения, и шум вдоль движущихся объектов не подавляется) или построение скомпенсированного предыдущего и/или следующего кадра (см. [27]) и смешивание текущего с ним. В последнем случае компенсация движения должна быть выполнено качественно, иначе будут артефакты на месте неправильно найденных блоков.
Простой метод, усредняющий пиксели по семи кадрам и учитывающий движение, описан в [7].
Медианная фильтрация
Медианная фильтрация — это стандартный способ подавления импульсного шума.
Для каждого пиксела в некотором его окружении (окне) ищется медианное значение и присваивается этому пикселу. Определение медианного значения: если массив пикселей отсортировать по их значению, медианой будет серединный элемент этого массива. Размер окна соответственно должен быть нечетным, чтобы этот серединный элемент существовал.
Медиану также можно определить формулой:  ,
,
где W — множество пикселей, среди которых ищется медиана, а fi — значения яркостей этих пикселей.
Для цветных изображений используется векторный медианный фильтр (VMF):  ,
,
где Fi — значения пикселей в трехмерном цветовом пространстве, а d — произвольная метрика (например, евклидова).
Однако в чистом виде медианный фильтр размывает мелкие детали, величина которых меньше размера окна для поиска медианы, поэтому на практике практически не используется. Пример усовершенствованной медианной фильтрации можно найти в [1].
Математическая морфология
Шумоподавление можно также осуществлять с использованием двух основных морфологических операций (см. [2]): сужения (erosion) и расширения (dilation), а также их комбинаций — закрытия (closing) и раскрытия (opening). Раскрытие (сначала сужение, потом расширение) убирает выступы на границах объектов, а закрытие (сначала расширение, потом сужение) заполняет отверстия внутри и на границах.
В качестве примера можно предложить следующий алгоритм, описанный в [3]. Сначала по исходному изображению I вычисляется новое изображение I‘, равное полусумме открытия-закрытия и закрытия-открытия исходного изображения. Получим сглаженное изображение, не содержащее шума. Тогда изображение D, равное разнице I и I‘,будет содержать весь шум и все те детали исходного изображения, размер которых меньше размера структурного элемента, примененного при морфологических операциях. Предполагая, что амплитуда у шума меньше, чем у деталей, обнулим в D все значения, меньшие некоторого порога, и снова сложим с I‘.
Изображения, обработанные этим методом, выглядят несколько искусственно, поэтому для обработки фотореалистичных изображений он не подходит, хотя, к примеру, для анимации может оказаться очень полезным.
Гауссовское размытие
Гауссовское размытие — это свертка изображения с функцией  ,
,
где параметр s задает степень размытия, а параметр A обеспечивает нормировку. Фактически, это то же усреднение, только пиксель смешивается с окружающими по определенному закону, заданному функцией Гаусса. Матричный фильтр, посчитанный по указанной формуле, называется гауссианом; чем больше его размер, тем сильнее размытие (при фиксированном s). Поскольку данный фильтр сепарабелен, то есть представим в виде  ,
,
то свертку можно производить последовательно по строкам и по столбцам, что приводит к значительному ускорению работы метода при больших размерах фильтра.
Вблизи границ (контуров на изображении) такой фильтр применять нельзя, чтобы не смазать детали изображения. Как следствие вдоль границ остается зашумленный контур.
Можно немного модифицировать этот метод для лучшей адаптации к границам: искать в каждом окне наилучшее направление размытия (наличие границы), вычисляя производные по направлениям, и применяя в данном окне направленный гауссиан вдоль найденной границы. В результате размытие будет проводиться вдоль границ изображения, и зашумленного контура не будет.
Методы на основе вейвлет-преобразования
Вейвлет-преобразование — это инструмент многомасштабного анализа. Применительно к области шумоподавления оно позволяет удалять шум с изображения, не затрагивая значительно границы и детали. Также оно позволяет эффективно подавлять шумы со спектрами, отличными от белого.
Обычное прямое одномерное дискретное вейвлет-преобразование (ДВП) — это итерационное применение низкочастотного и высокочастотного фильтров с последующим удалением каждого второго элемента (прореживанием) к низкочастотному сигналу, получаемому на выходе. В результате низкочастотной фильтрации получается приближение исходного сигнала, в результате высокочастотной — детализирующая информация об исходном сигнале, а полученные значения высокочастотного сигнала называются вейвлет-коэффициентами. Обратное ДВП состоит из итерационного применения обратных фильтров к высокочастотным и низкочастотным коэффициентам с восстановленными вторыми элементами (их значения принимаются за 0) и их сложения. Прямое преобразование называется анализом, а обратное — синтезом. Пара фильтров, участвующих в преобразовании — вейвлетным базисом. Схематично все вышесказанное (для одного уровня разложения) изображено на рисунке 2.5.1.

Рисунок 2.5.1. Схема одномерного вейвлет-преобразования
Здесь H1 (G1) — высокочастотный фильтр анализа (синтеза), а H2 (G2) — низкочастотный фильтр анализа (синтеза).
Двумерное дискретное вейвлет-преобразование получается в результате применения одномерного преобразования последовательно к строкам и столбцам изображения. В результате мы получаем одну низкочастотную полосу и три высокочастотных, причем ВЧ-коэффициенты каждой полосы отвечают за конкретное направление — вертикальное, горизонтальное, либо диагональное (см. рисунок 2.5.2).
 | |
 |
 |

 ,
,  ,
, 


 ,
,  — гамма-функция.
— гамма-функция. такого распределения вычисляется по формуле:
такого распределения вычисляется по формуле:  .
.
 .
. можно вычислить (это дисперсия исходного зашумленного сигнала), выразим из этой формулы параметр s (положим ? = 1):
можно вычислить (это дисперсия исходного зашумленного сигнала), выразим из этой формулы параметр s (положим ? = 1): .
. при ? = 1.
при ? = 1. — неполная гамма-функция.
— неполная гамма-функция. ,
,  — разность яркостей ( ) двух пикселей.
— разность яркостей ( ) двух пикселей. .
.


