
Регулирование скорости асинхронного двигателя
Наиболее распространены следующие способы регулирования скорости асинхронного двигателя : изменение дополнительного сопротивления цепи ротора, изменение напряжения, подводимого к обмотке статора, двигателя изменение частоты питающего напряжения, а также переключение числа пар полюсов.

Регулирование частоты вращения асинхронного двигателя путем введения резисторов в цепь ротора
Введение резисторов в цепь ротора приводит к увеличению потерь мощности и снижению частоты вращения ротора двигателя за счет увеличения скольжения, поскольку n = n о (1 — s).
Из рис. 1 следует, что при увеличении сопротивления в цепи ротора при том же моменте частота вращения вала двигателя уменьшается.
Жесткость механических характеристик значительно снижается с уменьшением частоты вращения, что ограничивает диапазон регулирования до (2 — 3) : 1. Недостатком этого способа являются значительные потери энергии, которые пропорциональны скольжению. Такое регулирование возможно только для двигателя с фазным ротором.
 Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Изменение напряжения, подводимого к обмотке статора асинхронного двигателя , позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Для этого между сетью переменного тока со стандартным напряжением U 1ном и статором электродвигателя включается регулятор напряжения .
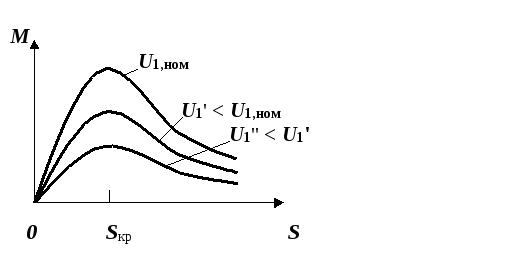
При регулировании частоты вращения асинхронного двигателя изменением напряжения, подводимого к обмотке статора, критический момент М кр асинхронного двигателя изменяется пропорционально квадрату подводимого к двигателю напряжения U рет (рис. 3 ), а скольжение от U рег не зависит.

Рис. 1. Механические характеристики асинхронного двигателя с фазным ротором при различных сопротивлениях резисторов, включенных в цепь ротора

Рис. 2. Схема регулирования скорости асинхронного двигателя путем изменения напряжения на статоре

Рис. 3. Механические характеристики асинхронного двигателя при изменении напряжения подводимого к обмоткам статора
Если момент сопротивления рабочей машины больше пускового момента электродвигателя (Мс > Мпуск), то двигатель не будет вращаться, поэтому необходимо запустить его при номинальном напряжении Uном или на холостом ходу.
Регулировать частоту вращения короткозамкнутых асинхронных двигателей таким способом можно только при вентиляторном характере нагрузки. Кроме того, должны использоваться специальные электродвигатели с повышенным скольжением. Диапазон регулирования небольшой, до n кр.
Для изменения напряжения применяют трехфазные автотрансформаторы и тиристорные регуляторы напряжения.

Рис. 4. Схема замкнутой системы регулирования скорости тиристорный регулятор напряжения — асинхронный двигатель (ТРН — АД)
Замкнутая схема управления асинхронным двигателем , выполненным по схеме тиристорный регулятор напряжения — электродвигатель позволяет регулировать скорость асинхронного двигателя с повышенным скольжением (такие двигатели применяются в вентиляционных установках).
Регулирование частоты вращения асинхронного двигателя изменением частоты питающего напряжения
Так как частота вращения магнитного поля статора n о = 60 f /р, то регулирование частоты вращения асинхронного двигателя можно производить изменением частоты питающего напряжения.
 Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость n о магнитного поля статора.
Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость n о магнитного поля статора.
Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью.
Для получения высоких энергетических показателей асинхронных двигателей (коэффициентов мощности, полезного действия, перегрузочной способности) необходимо одновременно с частотой изменять и подводимое напряжение. Закон изменения напряжения зависит от характера момента нагрузки Мс. При постоянном моменте нагрузки напряжение на статоре должно регулироваться пропорционально частоте.
Схема частотного электропривода приведена на рис. 5, а механические характеристики АД при частотном регулировании — на рис. 6.

Рис. 5. Схема частотного электропривода

Рис. 6. Механические характеристики асинхронного двигателя при частотном регулировании
С уменьшением частоты f критический момент несколько уменьшается в области малых частот вращения. Это объясняется возрастанием влияния активного сопротивления обмотки статора при одновременном снижении частоты и напряжения.
Частотное регулирование скорости асинхронного двигателя позволяет изменять частоту вращения в диапазоне (20 — 30) : 1. Частотный способ является наиболее перспективным для регулирования асинхронного двигателя с короткозамкнутым ротором. Потери мощности при таком регулировании невелики, поскольку минимальны потери скольжения.
 Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока.
Силовой трехфазный импульсный инвертор содержит шесть транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя.
В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями. Регулирование выходной частоты I вых и выходного напряжения осуществляется за счет высокочастотной широтно-импульсной модуляции.
Регулирование частоты вращения асинхронного двигателя переключение числа пар полюсов
Ступенчатое регулирование скорости можно осуществить, используя специальные многоскоростные асинхронные двигатели с короткозамкнутым ротором.
Из выражения n о = 60 f /р следует, что при изменении числа пар полюсов р получаются механические характеристики с разной частотой вращения n о магнитного поля статора. Так как значение р определяется целыми числами, то переход от одной характеристики к другой в процессе регулирования носит ступенчатый характер.
Существует два способа изменения числа пар полюсов. В первом случае в пазы статора укладывают две обмотки с разным числом полюсов. При изменении скорости к сети подключается одна из обмоток. Во втором случае обмотку каждой фазы составляют из двух частей, которые соединяют параллельно или последовательно. При этом число пар полюсов изменяется в два раза.

Рис. 7. Схемы переключения обмоток асинхронного двигателя: а — с одинарной звезды на двойную; б — с треугольника на двойную звезду
Регулирование скорости путем изменения числа пар полюсов экономично, а механические характеристики сохраняют жесткость. Недостатком этого способа является ступенчатый характер изменения частоты вращения асинхронного двигателя с короткозамкнутым ротором. Выпускаются двухскоростные двигатели с числом полюсов 4/2, 8/4, 12/6. Четырехскоростной электродвигатель с полюсами 12/8/6/4 имеет две переключаемые обмотки.
Использованы материалы книги Дайнеко В.А., Ковалинский А.И. Электрооборудование сельскохозяйственных предприятий.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Способы регулирования частоты вращения асинхронных двигателей
Существенным недостатком асинхронных электродвигателей является относительно сложное регулирование частоты их вращения.
Возможные способы регулирования частоты вращения асинхронных электродвигателей можно установить в результате анализа выражения, записанного относительно частоты вращения ротора двигателя: n2= 60f1(1 ‑s)/p. Анализ формулы показывает, что частоту вращения асинхронного двигателя можно изменить, меняя скольжение ротораs, число пар полюсоврдвигателя или частотуf1питающего напряжения.
Регулирование частоты вращения изменением скольжения возможно изменением подводимого к обмотке статора напряжения или изменением активного сопротивления в цепи ротора.
Регулирование частоты вращения изменением активного сопротивлениявозможно только для асинхронных двигателей с фазным ротором, в обмотку которого (посредством контактных колец) включается добавочное регулировочное сопротивление по такой же схеме, как и при пуске двигателя. Однако пусковое сопротивление не годится для регулирования скорости, так как оно не рассчитано на длительную работу. Регулировочное сопротивление должно выдерживать токи, сравнимые с пусковыми, в течение длительного времени.
При увеличении активного сопротивления цепи ротора значение критического скольжения ротора двигателя sкв соответствии с приведенной ранее формулой увеличивается.
Включая различные добавочные сопротивления можно получить семейство механических характеристик двигателя, примерно таких, какие показаны на рис. 11, из которых следует, что с увеличением активного сопротивления в цепи ротора при постоянном моменте нагрузки на валу электродвигателя рабочая точка смещается с одной механической характеристики на другую, соответствующую новому, увеличенному сопротивлению. Происходит увеличение скольжения ротора, а следовательно, уменьшение частоты вращения ротора асинхронного двигателя. Регулирование при этом способе возможно в широком диапазоне скольжений, однако при уменьшении частоты нарушается жесткость механической характеристики и увеличиваются электрические потери.
Регулирование частоты вращения изменением питающего напряжениявозможно за счет того, что критическое значение моментаМк, а следовательно, величинаМ(s) при любом скольжении пропорциональна квадрату питающего напряженияU1 2 . Из приведенных на рис.12 кривых явно видно, что при постоянном моменте нагрузки на валу электродвигателя рабочая точка смещается с одной механической характеристики на другую, соответствующую новому, уменьшенному напряжениюU1. Происходит увеличение скольжения ротора, а следовательно, уменьшение частоты вращения ротора асинхронного двигателя. Регулирование асинхронного двигателя при этом способе возможно только в незначительном диапазоне скольжений, который ограничивается критическими моментом и скольжением ротора.
Следует отметить, что при уменьшении напряжения происходит резкое снижение критического момента двигателя, пропорционально квадрату напряжения и, следовательно, резкое уменьшение перегрузочной способности двигателя по кратности критического момента, что ограничивает область применения описанного способа.
Ступенчатое регулирование частоты вращения асинхронных электродвигателей с короткозамкнутым ротором, как указывалось, возможно путемизменения числа пар полюсовза счет переключения секций его обмотки, что находит применение для многоскоростных двигателей. Сущность способа заключается в том, что при постоянной частоте напряжения питающей сети, частота вращения асинхронного двигателя зависит от числа пар полюсов обмотки статора. Таким образом, если на статоре асинхронного двигателя разместить две или более отдельных обмоток с разными числами пар полюсов, то при включении в сеть каждой из обмоток в отдельности, можно получать различные частоты вращения магнитного поля, а значит, и ротора. К сожалению, этот экономичный и сравнительно простой способ не позволяет плавно регулировать частоту вращения двигателя. Промышленностью освоен выпуск серий электродвигателей, частота вращения которых регулируется ступенями в 2, 3 и 4 раза без потерь мощности. Необходимо также отметить, что устройство многоскоростных электродвигателей значительно сложней, чем односкоростных, что ведет к их удорожанию.
Частоту вращения асинхронного двигателя можно регулировать также изменением частоты питающего тока, но этот способ для мощных двигателей практически не применяют ввиду отсутствия простых и экономичных устройств, регулирующих частоту тока в мощных цепях. В то же время, разработка и промышленное освоение мощных и дешевых управляемых полупроводниковых приборов (диоды, тиристоры) позволяет реализовывать простые и надежные преобразователи частоты и напряжения малой и средней мощности, с помощью которых можно легко регулировать частоту вращения асинхронных электродвигателей с короткозамкнутым ротором, что значительно упрощает привод различных механизмов, при этом часто отпадает необходимость в редукторах, коробках скоростей, трансмиссиях.
Источник
Регулирование частоты вращения асинхронного электродвигателя
Подписка на рассылку
Рисунок 1. Асинхронный двигатель Асинхронный двигатель (рис. 1) имеет неподвижную часть, которая называется статор, и вращающуюся часть, именуемую ротором. Магнитное поле создается в обмотке, размещенной в статоре. Такая конструкция электродвигателя позволяет регулировать частоту его вращения различными способами.
Основные технические характеристики, учитываемые при изменении частоты вращения
При регулировании частоты вращения асинхронных электродвигателей следует учитывать несколько основных технических показателей, которые в значительной мере влияют на процесс работы двигателей.
- Диапазон регулирования Д, то есть предел, до которого возможно изменять частоту вращения. Эта характеристика вычисляется по соотношению минимальной и максимальной частоты вращения.
- Плавность регулирования — определяется по минимальному скачку частоты вращения электродвигателя, когда осуществляется переход одной механической характеристики на другую.
- Направление изменения частоты вращения двигателя (так называемая зона регулирования). Номинальные условия работы определяют естественную механическую характеристику двигателя. Когда осуществляется процесс регулирования частоты вращения, эти характеристики (напряжение и частота питающей сети) начнут изменяться. В результате получаются искусственные характеристики, которые обычно ниже естественных.
Есть несколько способов регулирования частоты вращения электродвигателя:
Регулирование частоты вращения изменением частоты питающей сети
Регулирование частоты вращения путем изменения частоты в питающей сети считается одним из самых экономичных способов регулирования, который позволяет добиться отличных механических характеристик электропривода. Когда происходит изменение частоты питающей сети, частота вращения магнитного поля также меняется.
Преобразование стандартной частоты сети, которая составляет 50 Гц, происходит за счет источника питания. Одновременно с изменением частоты происходит и изменение напряжения, которое необходимо для обеспечения высокой жесткости механических характеристик.
Регулирование частоты вращения позволяет добиться различных режимов работы электродвигателя:
- с постоянным вращающим моментом;
- с моментом, который пропорционален квадрату частоты;
- с постоянной мощностью на валу.
В качестве источника питания для регулирования могут использоваться электромашинные вращающиеся преобразователи, а также статические преобразователи частоты, которые работают на полупроводниковых приборах, серийно выпускающихся промышленностью.
Несомненным преимуществом частотного регулирования является наличие возможности плавно регулировать частоту вращения в обе стороны от естественной характеристики. При регулировании достигается высокая жесткость характеристик и отличная перегрузочная способность.
Регулирование частоты вращения изменением числа полюсов
Регулирование частоты вращения путем изменения числа полюсов происходит за счет изменения частоты вращения магнитного поля статора. Частота питающей сети остается неизменной, в то время как происходит изменение частоты вращения магнитного поля и частоты вращения ротора. Они меняются обратно пропорционально числу полюсов. Например, число полюсов равно 2, 4, 6, 8, тогда обороты двигателя при изменении их количества будут составлять 3000, 1500, 1000, 750 оборотов в минуту.
Двигатели, которые обеспечивают переключение числа пар полюсов, имеют обычно короткозамкнутый ротор с обмоткой. Благодаря этому ротору обеспечивается возможность работы двигателя без дополнительных пересоединений в цепи.
Изменение частоты вращения включением в цепь ротора с реостатом
Еще одним способом изменения частоты вращения двигателя является включение в цепь ротора с реостатом. Такой метод имеет существенное ограничение, так как может быть применен только для двигателей с фазным ротором. Он обеспечивает плавное изменение частоты вращения в очень широких пределах. Минусом же являются большие потери энергии в регулировочном реостате.
Изменение направления вращения
Изменение направления вращения двигателя может быть осуществлено за счет изменения направления вращения магнитного поля, которое создается обмотками статора. Изменение направления вращения можно достичь, изменив порядок чередования тока в фазах обмотки статора.
Источник



