
Способы определения МС с помощью БРЛС (угломерный, дальномерный, угломерно-дальномерный)




![]()
![]()
С помощью БРЛС можно определить МС гораздо точнее, чем обзорно-сравнительным способом. Для этого на экране локатора нужно измерить курсовой угол и дальность до ориентира.
Курсовой угол ориентира (КУО, ψ) – это угол, заключенный между продольной осью ВС и направлением на ориентир (рис. 9.9). Это по сути то же самое, что КУР, только вместо радиостанции ориентир.
На экране локатора КУО — это угол между курсовой чертой (она направлена по продольной оси ВС) и направлением на ориентир от центра экрана. Отсчитать значение КУО можно по делениям и оцифровке, нанесенной на краю экрана. Правда, точность такого измерения не очень высока, СКП составляет около 1,5º.
Дальность до РЛО определяется с помощью меток дальности. Если считать, что на рис. 8.9 изображение соответствует масштабу 50 км (расстояние от центра до края экрана) и, следовательно, интервал между метками дальностей 10 км, то удаление первого РЛО примерно 38 км, а второго около 44 км. Понятно, что если РЛО находится между метками дальности, то пилоту приходится интерполировать дальность, и точность определения дальности будет зависеть от его глазомера. Если интервал между метками 10 км, то можно ошибиться на 1-2 км, а если этот интервал (на другом масштабе) 50 км, то погрешность будет значительно больше. Наибольшая точность будет, когда РЛО находится прямо на метке дальности. В зависимости от масштаба СКП измерения дальности может составлять от 1 до 4 км.
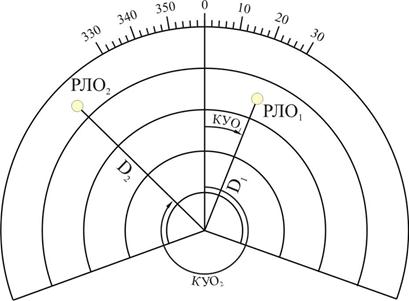
Рис. 9.9. Курсовые углы и дальности ориентиров
С помощью БРЛС измеряют наклонную дальность и в принципе ее необходимо пересчитать в горизонтальную. Но это имеет смысл делать лишь при небольших удалениях. Например, если высота полета 10 км, а наклонная дальность 40 км, то горизонтальная дальность составит 38,7 км, то есть будет отличаться от наклонной на 1,3 км. Поэтому, если дальность не пересчитывать, то погрешность из-за этого будет сравнима с погрешностью измерения самой этой наклонной дальности. А на больших удалениях она будет гораздо меньше.
Дальность сама по себе уже является навигационным параметром, а с помощью КУО можно рассчитать пеленг самолета. Поэтому даже по одному РЛО можно определить два навигационных параметра, что достаточно для определения МС. Но на экране можно наблюдать одновременно несколько РЛО, поэтому определить МС можно разными способами. Это практически те же способы, которые были рассмотрены применительно к другим навигационным средствам. Например, если мы знаем, как определить МС с помощью пеленга и дальности, полученных с помощью VOR/DME, то точно так же можно определить МС по пеленгу и дальности, полученным с помощью БРЛС. Не имеет значения, с помощью какого именно средства получены эти два навигационных параметра. В этом и состоит достоинство обобщенного метода линий положения.
1) Угломерно-дальномерный способ (по курсовому углу и дальности).
Для его применения достаточно наблюдать один РЛО (например, одинокий остров в океане). По экрану БРЛС измеряются КУО и дальность до ориентира. При необходимости дальность пересчитывается в горизонтальную, а по КУО и курсу рассчитывается истинный пеленг самолета. Расчет ИПС производится точно так же как, как и рассмотренный ранее расчет ИПС по курсовому углу радиостанции (КУР), ведь не имеет значения, курсовой угол чего именно мы измерили – радиостанции или ориентира.
Если измерен магнитный курс, то
Здесь также магнитное склонение берется в месте вероятного местоположения ВС, а последний член формулы предназначен для перехода от истинного меридиана ВС к истинному меридиану РЛО – ведь именно от него на карте будет прокладываться пеленг.
После расчета на карте прокладываются ЛРПС и ЛРР и в точке их пересечения определяется место самолета (рис. 9.10).
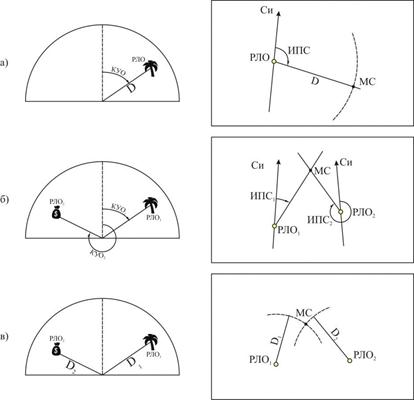
Рис. 9.10. Способы определения МС по БРЛС на карте: а) угломерно-дальномерный, б) угломерный, в) дальномерный
2) Угломерный способ (по двум курсовым углам).
Может быть использован, когда по каким-то причинам метки дальности на экране не видны. Выбираются два РЛО и для каждого из них рассчитывается ИПС по приведенной выше формуле. Чтобы точность определения была выше, следует выбирать такие РЛО, чтобы разность их курсовых углов была ближе к 90°. Место самолета определяется в точке пересечения двух проложенных на карте ЛРПС (см. рис. 9.10,б).

3) Дальномерный способ (по двум дальностям ориентиров).
По меткам дальности до двух РЛО определяются дальности и на карте прокладываются соответствующие им ЛРР в виде окружностей (см. рис. 9.10, в). Хотя курсовые углы ориентиров не измеряются, РЛО также следует выбирать так, чтобы разность КУО была ближе к 90°. Ведь этой величине и будет равен угол пересечения линий положения, а от него зависит точность определения МС.
Источник
Угломерный способ определения дальности
1. Угломерный, угломерно-дальномерный и разностно-дальномерный методы определения местоположения источников радиоизлучений.
1.1 Общая характеристика методов .
В зависимости от параметра электромагнитного поля, используемого при определении местоположения РЭС, различают: амплитудные, временные, фазовые и частотные методы. По измеряемым параметрам электромагнитного поля могут быть определены геометрические величины: пеленг, расстояние до РЭС, разность расстояний от РЭС до двух точек приема.
Измеренным геометрическим величинам соответствуют линии положения РЭС на плоскости (ЛП) или поверхности положения (ПП) в пространстве.
Форма ЛП или ПП и определяющие их соотношения зависят от метода определения местоположения (МП) (рис.1).
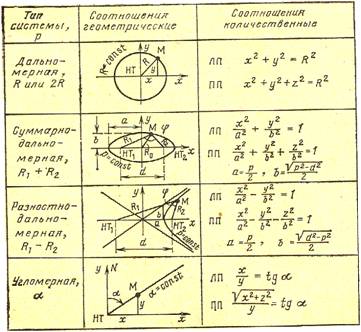
Рис.1 Формы и соотношения для линий и поверхностей положения.
Например, для дальномерной системы: М – источник ИРИ (РЭС); О1 – средство разведки (навигационная точка НТ) ; геометрическая постоянная
ЛП: х 2 + у 2 = R 2 – концентрическая окружность с центром в НТ.
ПП: х 2 + у 2 + Z 2 + R 2 – сфера с центром в НТ.
Определение: Геометрическое место точек возможного положения РЭС на плоскости ( в пространстве), для которых геометрическая величина, определяющая местоположение объекта, есть постоянная, называется линией ( поверхностью) положения.
Для однозначного определения МП необходимо, чтобы в области нахождения РЭС пересекалось не менее 2 х линий или не менее трех поверхностей положения (одна из которых, поверхность Земли).
В настоящее время применяются следующие методы определения МП излучающих РЭС: угломерный, разностно-дальномерный, суммарно-дальномерный, угломерно-дальномерный, дальномерный, комбинированный.
Рассмотрим некоторые из них.
1.2 Угломерный (пеленгационный) метод основан на определении МП, как точки пересечения ЛП, соответствующих измеренным в двух разнесенных точках приема пеленгами (рис.2).
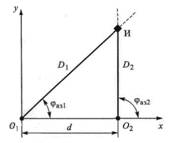
Рис.2 Угломерный метод определения местоположения ИРИ на плоскости.
Для определения МП «и» на плоскости достаточно измерить j аз1 и j аз2 . Тогда по теореме синусов:
 ;
;
 ;
;
где d – база, о1 и о2 – точки приема (НТ)
Для определения МП «и» в пространстве (рис.3) измеряются азимутальные углы j аз1 j аз2 и угол места в одной из точек приема. Либо наоборот – углы места j ум1 и j ум2 в двух точках приема и азимут в одной из них.
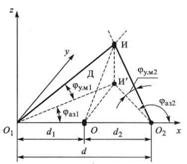
Рис.3 Угломерный метод определения местоположения ИРИ в пространстве.

Важнейшей оценкой, определяющей выбор способа определения МП, является погрешность измерений. Однако непосредственному измерению в аппаратуре подвергаются электрические параметры с характерной для данной системы погрешностью. Погрешности связаны следующей функциональной цепочкой:
где s э – ошибка определения электрического параметра;
s р – ошибка определения геометрического параметра;
s л — ошибка определения ЛП (ПП);
s Д — ошибка определения МП.
Ошибки определения линейного и геометрического параметров связаны соотношением:
s лр = Кл s р , где Кл – коэффициент линейной ошибки (определяется выбранным методом определения МП).
Например, для угломерного метода (плоскостной случай):
Для рассматриваемого рисунка Д=Д1, а  — ошибка определения угла.
— ошибка определения угла.
Она связана с ошибкой определения электрического параметра, например, фазы. В свою очередь 

Анализ показывает, что наибольшая точность определения МП будет при a @ 110 о и расположению РЭС на нормали к середине базы при относительно небольших Д.
Наихудшая точность соответствует направлениям на РЭС, близким к направлению базы.
Точность определения МП может быть увеличена при многократном пеленговании (10-15 пеленгов), но при этом возникает опасность ложных пеленгов (рис.4)

Рис.4 Возникновение ложных пеленгов
Здесь наряду с определением 3 х истинных источников И1, И2, И3 обнаруживается 6 ложных (ЛИ).
Исключение ЛП возможно за счет опознавания источников путем сравнения по параметрам сигналов ( f , t u , Tu ), либо путем взаимокорреляционной обработки сигналов, принимаемых в о1, о2.
Достоинства метода – простота.
Недостатки метода – необходимость согласования обзора из 2 х точек и зависимость ошибок от положения источника.
1.3 Разностно-дальномерный метод основан на измерении относительного запаздывания сигналов, принимаемых в 3 х пунктах приема, и нахождении ЛП (гипербол), а также вычислении координат точки пересечения ЛП (рис.5)
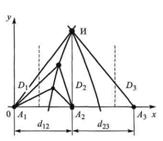
Рис.5 Разностно-дальномерный способ определения местоположения
Здесь А1, А2, А3 –разнесенные точки наблюдения, принадлежащие различным базам А1, А2, d 12 и А2, А3, d 23 . Фокусы гипербол совпадают с точками наблюдения. Разности расстояний, определяемые путем измерения относительного запаздывания сигналов, будут:
Они являются параметрами гипербол, по которым гиперболы строятся. (Гипербола – геометрическое место точек, для каждой из которых разность расстояний до фокусов есть величина постоянная (рис.1)
Пространственное положения источника ЭМИ определяется по трем разностям дальностей, измеренных в 3 х , 4 х приемных пунктах. МП источника ЭМИ – точка пересечения трех гиперболоидов вращения.
Линейная ошибка метода:
 , где
, где  — СКО определения Р.
— СКО определения Р.
В свою очередь ; 
j — угол под которым видна база А1 А2 из точки И
Обычно базы (А1А2) и (А2А3) располагаются не на одной линии а под a =60 о -90 о
Для определения временных задержек D t 12 и D t 23 используют, например, передний фронт импульса сигнала РЭС.
Для уменьшения s Л базу нужно увеличивать. Точность определения МП данным методом высокая (десятки м).
Рассматриваемый метод применяется в пассивных импульсных (временных) и корреляционно-базовых системах определения местоположения источников ЭМИ.
При использовании пассивных разностно-дальномерных систем также возможно обнаружение ложных несуществующих источников ЭМИ в тех случаях, когда источник излучает периодические сигналы с малым периодом следования (с малой скважностью). На временном интервале, равном разности времени распространения сигнала от источника до приемника, укладывается несколько периодов излучаемых сигналов.
В результате система измеряет большое количество разностей дальностей и определяет соответственно большое количество гиперболических поверхностей. Многие из них являются ложными.
Устранить подобную неоднозначность можно путем разнесения источников по угловым координатам, т.е. совместным применением разностно-дальномерного и триангуляционного методов.
Помимо рассмотренных находят применение комбинации методов: угломерно-дальномерный и угломерно-разностно-дальномерный (рис.6,7).
SHAPE \* MERGEFORMAT 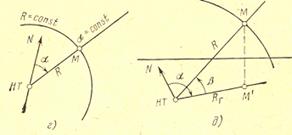
Рис.6 Дальномерно-угломерный способ
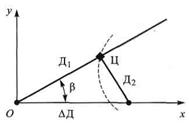
Рис.7 Угломерно-разностно-дальномерный способ
2. Погрешность определения местоположения источника
Установим связь между ошибкой олределения МП и линейными ошибкам, справедливую для любого метода (рис.8)
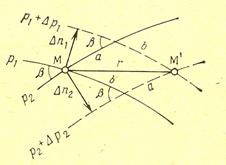
Рис.8 Определение ошибки местоположения
Здесь Р1 и Р2 истинные ЛП для геометрических параметров Р1 и Р2,
Р1+ D Р1 и Р2+ D Р2 – ЛП измеренные, отстоящие от истинных на величины линейных ошибок D n 1 и D n2; М – истинное МП объекта, М ¢ — найденное (измеренное); r – ошибка МП объекта.
Из D МОМ ¢ можно найти:
r 2 = a 2 + в 2 ± 2ав cos b , где  ,
,  .
.
Тогда  .
.
Переходя к СКО и полагая измерения ЛП Р1 и Р2 некоррелированными получим:  .
.
Здесь  — дисперсии ошибок определения линий положения.
— дисперсии ошибок определения линий положения.
Вывод: для любых методов при заданных линейных ошибках  — ошибка МП s Д минимальна при b =90 о .
— ошибка МП s Д минимальна при b =90 о .
В РРТР широко распространены угломерный и угломерно-дальномерный методы, как единственные методы, позволяющие однозначно определять МП.
Недостатком угломерного метода является зависимость ошибки МП от дальности и сравнительно большие значения ошибок.
В последнее время все чаще используется гиперболический метод. Его достоинства:
- Высокая точность определения МП;
- Отсутствие необходимости в точной ориентации антенн;
- Возможность использования слабонаправленных антенн (широкая зона обзора);
- Возможность использования больших высот для носителя аппаратуры РРТР и, следовательно, большая дальность действия.
- Невозможность определения МП источника немодулированного колебания;
- Необходимость временной синхронизации между пунктами приема с точностью до 10 -8 с;
- Зависимость точности от вида модуляции (лучше для остроконечной АКФ модулирующего сигнала);
- Затраты времени на измерения. В отличие от пеленгатора, где результат – пеленг, в РДС формируются выборки сигналов. Они передаются со всех постов на общий пост вычисления координат, где определяются соответствующие задержки, а по ним МП.
Для определения МП ИРИ с произвольными видами модуляции более предпочтительны угломерные системы на основе пеленгаторов.
Источник



