
- Раздел I самостоятельные и контрольные работы
- Глава 1 теоретическая механика. Статика
- 1.1. Определение реакций идеальных связей аналитическим способом
- Лекция 2. Связи и их реакции
- 2.1. Понятие о связях
- 2.2. Простейшие виды связей
- 2.3. Тело на гладкой наклонной плоскости
- Вопросы для самоконтроля
- Задачи к лекции
Раздел I самостоятельные и контрольные работы
Глава 1 теоретическая механика. Статика
1.1. Определение реакций идеальных связей аналитическим способом
1. Указывают точку, равновесие которой рассматривается. В задачах для самостоятельной работы такой точкой является центр тяжести тела или точка пересечения всех стержней и нитей.
2. Прикладывают к рассматриваемой точке активные силы. В задачах для самостоятельной работы активными силами являются собственный вес тела или вес груза, которые направлены вниз (правильнее — к центру тяжести земли). При наличии блока вес груза действует на рассматриваемую точку вдоль нити. Направление действия этой силы устанавливается из чертежа. Вес тела принято обозначать буквой G.
3. Мысленно отбрасывают связи, заменяя их действие реакциями связей. В предлагаемых задачах используются три вида связей — идеально гладкая плоскость, идеально жесткие прямолинейные стержни и идеально гибкие нити, — в дальнейшем именуемые соответственно плоскостью, стержнем и нитью.
При замене связей их реакциями следует помнить, что реакция плоскости направлена по нормали (перпендикуляру) к ней в точке контакта (соприкосновения), а реакции стержня и нити — по их осям. При этом реакция плоскости направлена от нее и проходит через центр тяжести тела, а реакция нити — от рассматриваемой точки или тела (нить всегда испытывает растяжение). Направление реакции стержня заранее неизвестно, поэтому оно может быть принято произвольно. Если направление реакции стержня трудно определить из схемы, то его принимают растянутым, и реакцию направляют от рассматриваемой точки. Истинное направление будет установлено после решения уравнений.
Реакции нити и стержня принято называть усилиями. Реакцию плоскости обозначают буквой R, а усилие в нити и стержне — S или N. В дальнейшем, если не указывается вид связи или говорится о разных связях, то будет применяться термин «реакция».
К рассматриваемой точке прикладывают реакции связей. Лучше сделать это на отдельном чертеже, выполненном схематически, придерживаясь масштаба при изображении углов. В результате получают систему трех сходящихся сил. Активная сила (груз или собственный вес тела) известна, а реакции связей (их две) неизвестны.
4. Выбирают положение прямоугольной системы координат, Начало координат совмещают с точкой, равновесие которой рассматривается. Положение осей может быть выбрано произвольно и на конечном результате при правильном решении это не отражается. Обычно используют один из двух приемов для выбора направления осей координат. Первый: одну из осей (любую) направляют так, чтобы она совпала с направлением одной из неизвестных реакций, а другая при этом составляла бы с первой угол 90°. Второй: ось у направляют вертикально, а ось х — горизонтально. В частном случае возможен еще один прием для расположения осей: если система сил имеет ось симметрии, то одну из координатных осей совмещают с ней.
Во всех случаях следует определить углы между реакциями и координатными осями и указать их на чертеже.
5. Составляют уравнения равновесия вида:

Напомним, что проекцией силы на ось является произведение модуля (величины) этой силы на косинус угла между направлениями действия силы и оси. Если угол между направлениями силы и оси острый, то перед величиной проекции ставится знак «плюс», т. е. сила и ось направлены в одну сторону, если они направлены в противоположные стороны, то ставиться знак «минус».
Решают систему двух уравнений с двумя неизвестными. При этом если одна из осей совпадает с неизвестной реакцией, то одно из двух уравнений содержит только одно неизвестное, что упрощает решение системы.
Если ответ получится со знаком «минус», то это означает, что направление реакции на чертеже было выбрано неверно, т.е. если до составления уравнений равновесия стержень предполагался растянутым, то в действительности он будет сжатым, и наоборот. Такой ответ не является ошибкой решения (если оно выполнено верно), так как чертеж и ответ вместе дают возможность указать истинное направление реакции.
6. Выполняют проверку решения. Обычно она делается графическим или другими способами, но может быть выполнена и аналитически. Для этого следует изменить положение осей координат и решить задачу в новой системе. Ответы должны быть одинаковыми.
Пример 1. Определить величину и направление реакций связей для схемы, приведенной на рис. 1, а под действием груза С = 30 кН. Проверить правильность определения реакций.
Решение. 1. В задаче рассматривается равновесие тела, опирающегося на плоскость и подвешенного на нити. Заменим тело точкой 0, совпадающей с центром тяжести.
2. Приложим к точке О активную силу, которой является собственный вес тела G. Направим ее вниз (рис. 1, б).
3. Мысленно отбросим связи — плоскость и нить. Заменим их действие на точку 0 реакциями связей. Реакция плоскости (обозначим ее R) проходит по нормали к плоскости в точке А, а реакция или усилие в нити (обозначим ее 5) — по нити от точки. Обе реакции и вес тела или линии их действия должны пересекаться в точке 0.
Изобразим действующие силы в виде системы трех сходящихся сил на отдельном чертеже (рис. 1, в).

4. Выберем положение системы координат. Начало координат совмещаем с точкой 0. Ось х совмещаем с направлением линии действия реакции R, а ось у направим перпендикулярно оси х (рис. 1, г). Определим утлы между осями координат и реакциями R и S. Обычно рис. 1, б и 1, в не выполняют отдельно, а сразу от рис. 1, а переходят к рис. 1, г. Можно было ось у совместить с усилием S, и ось х направить по углом 90°, тогда решение было бы другим.
5. Составим сумму проекций всех сил на оси координат:
1) £ X = R + S cos 60° — G cos 40° — 0;
2)]Ty = Scos30 0 -Gcos50 0 = 0.
Решим систему уравнений. Из второго уравнения находим

Из первого уравнения находим

6. Проверим решение, для чего расположим оси координат, как показано на рис. 1, д. Составим уравнения равновесия для вновь принятых осей:
Решим систему уравнений способом подстановки. Из первого уравнения найдем R:
Подставим это выражение во второе уравнение:


Теперь найдем R:
Очевидно, что при расположении осей, как показано на рис. 1, д, вычисления оказались более сложными.
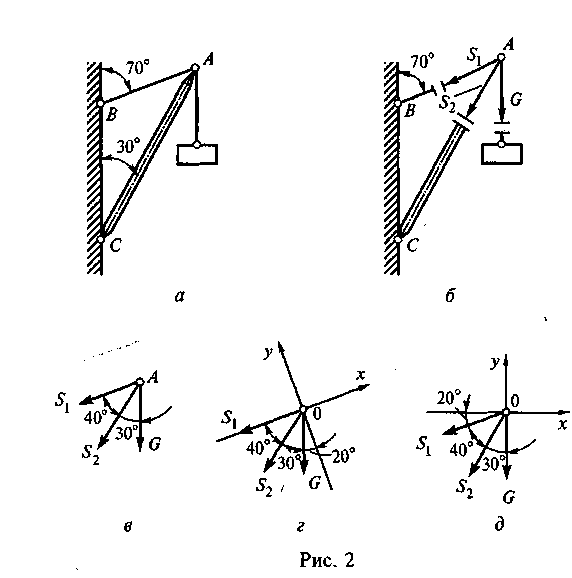
Пример 2. Определить усилия в нити и стержне кронштейна, показанного на рис. 2, а, если G= 20 кН.
Решение. 1. Рассмотрим равновесие точки А (или узла А), в которой сходятся все стержни и нити.
2. Активной силой является вес груза G, направленный вниз (рис. 2, б).
3. Отбросим связи: стержень и нить. Усилие в нити обозначим S\ и направим от точки А, так как нить может испытывать только растяжение. Усилие в стержне обозначим S2 и тоже направим от точки А, предполагая что стержень АС растянут (рис. 2, б).
Выполним на отдельном чертеже схему действия сил в точке А (рис. 2, в).
4. Выберем положение системы координат. Начало координат совмещаем с точкой А (рис. 2, г). Ось х совмещаем с линией действия усилия S1 , а ось у располагаем перпендикулярно оси х. Укажем углы между осями координат и усилиями Si и S2.
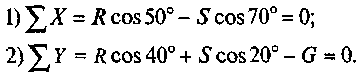
5. Составим уравнения равновесия:

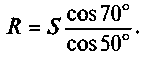
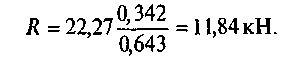
Из второго уравнения находим

Из первого уравнения находим

Знак «минус» перед S2 свидетельствует о том, что стержень АС не растянут, как предполагалось, а сжат.
6. Проверку решения предлагаем выполнить самостоятельно, расположив оси координат так, как показано на рис. 2, д.
Величина усилий зависит от углов наклона стержня и нити. Например, если на рис. 2, а угол 70° заменить на 60°, сохранив угол 30 Р , то усилия будут равны: Si = 20 кН, S2 = -34,64 кН. А при угле 50° S< = 29,26 кН, S2 = -44,8 кН. Оба усилия растут и становятся больше веса груза.
Пример 3. Как изменятся усилия в стержне и нити, если груз будет перекинут через блок, как показано на рис. 3, а>.
Остальные данные — в примере 2.
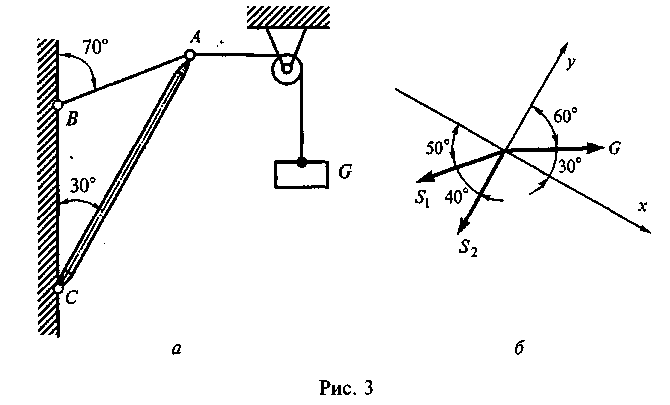
Решение. 1. Рассматриваемой точкой остается точка А. 1. Активная сила (вес груза G) действует на точку горизонтально слева направо, так как груз перекинут через блок.
3. Усилия Si и S2 прикладываем к точке А, как в примере 2.
4. Выбираем систему координат, как показано на рис. 3, б.
5. Составляем и решаем уравнения равновесия:

Из первого уравнения находим

Из второго уравнения находим

Ответ: Si = 26,94 кН; S2 = -10,64 кН при принятом направлении усилий на чертеже. Усилие Si увеличилось, S2 — уменьшилось, а знаки не изменились.
Задание для самостоятельной работы 1. Определить величину и направление реакций связей по данным одного из вариантов, показанных на рис. 4.
Источник
Лекция 2. Связи и их реакции
2.1. Понятие о связях
В Лекции 1 были даны определения свободных и несвободных тел. Возможное движение таких тел, соответственно, ничем не ограничено или же, наоборот, стеснено другими телами. Любые ограничения, накладываемые на движение тела, называют связями. Как правило, связи реализуются с помощью других тел.
Пример. Для лежащего на столе карандаша стол служит связью – он не дает карандашу падать вниз.
Пытаясь двигаться, тело вступает с наложенной на него связью в механическое взаимодействие и действует на нее с силой, которую называют силой давления на связь. Согласно закону равенства действия и противодействия, связь действует на тело с силой, равной по модулю, но противоположной по направлению. Сила, с которой связь действует на тело, называется силой реакции или реакцией связи. Она направлена в сторону, противоположную той, куда связь мешает телу двигаться. В более сложных случаях связь описывается не одной силой, а системой сил.
В теоретической механике применяется принцип освобождаемости от связей:
Пример. Карандаш, лежащий на столе, под действием силы тяжести \(\vec G\) должен двигаться вниз. Этого не происходит, потому что на карандаш действует реакция стола \(\vec N\), направленная вверх и уравновешивающая силу тяжести (рис. 2.1).

Рис. 2.1. Карандаш под действием силы тяжести и реакции связи
Как правило, проектируемые сооружения, конструкции и механизмы не «плавают свободно» в пространстве; их перемещения стеснены какими-то связями. Поэтому поиск реакций связей, наложенных на тело, – важная задача. Знать реакции связей, наложенные на тело, необходимо по двум причинам:
Требуется знать, выдержит ли связь давление, оказываемое на нее телом. Это давление равно реакции, которую развивает связь.
Пример. Мосты и путепроводы могут выдерживать строго определенную нагрузку, поэтому на них устанавливают ограничения по массе въезжающих автомобилей и устанавливают соответствующие дорожные знаки (рис. 2.2). В этом примере мост служит связью для изучаемого твердого тела (автомобиля).

Требуется знать, выдержит ли само тело реакцию стесняющей его связи.
Пример. Спускаемые модули космических кораблей проектируют таким образом, чтобы они выдерживали жесткую посадку (удар о Землю). При ударе на эти модули действует сила реакции Земли, не дающей им падать дальше.
2.2. Простейшие виды связей
Ниже рассматриваются некоторые виды связей и указываются направления их реакций.
Гладкая поверхность (опора). Будем называть гладкой поверхность, трением о которую можно пренебречь. Реакция \(\vec N\) этой связи направлена перпендикулярно поверхности. Это объясняется тем, что при движении вдоль гладкой поверхности сопротивления не возникает; зато связь мешает телу «проваливаться» внутрь поверхности. Если поверхность искривлена, то сила ее реакции направлена перпендикулярно к касательной плоскости (рис. 2.3).

Рис. 2.3. Направление реакции плоской горизонтальной, плоской наклонной и искривленной поверхности
Замечание. Соприкосновение тела и поверхности может происходить не в единственной точке, а на некоторой площадке. Это значит, что действие тела на поверхность (как и ее реакция) будут представлять собой распределенную силу. Для простоты вычислений ее заменяют сосредоточенной равнодействующей.
Из-за того, что вектор \(\vec N\) направлен перпендикулярно (по нормали) к поверхности, эту реакцию также называют нормальной.
Пример. Гладкой поверхностью можно считать стол, на котором покоится некий предмет, например, карандаш (см. рис. 2.1).
Если одна поверхность опирается на другую своим ребром (изломом), то направление реакции перпендикулярно той поверхности, к которой в месте контакта можно провести касательную. Так, на рис. 2.4 а) показаны реакции поверхности в двух точках – A и B. Если же обе поверхности в месте соприкосновения имеют излом, как в точке A на рис. 2.4 б), то направление реакции нельзя определить заранее.

Однако положение равновесия, подобное рис. 2.4 б), крайне неустойчиво. Если представить себе, что на рисунке изображена балка, положенная на бордюр, то она упадет при малейшем сотрясении. Поэтому указанный случай представляет, скорее, теоретический интерес.
Нить. Представление о такой связи дает леска, на которой подвешен груз. Нить предполагается невесомой, гибкой (она может сминаться), тонкой и нерастяжимой (сохраняющей свою длину). Эпитет «тонкая» означает, что ее толщина много меньше длины, и поэтому свойства нити одинаковы во всех точках ее поперечного сечения. Такая связь препятствует движению тела лишь в одном направлении – вдоль по нити в сторону ее растяжения. Поэтому реакция данной связи (натяжение \(\vec T\)) направлена вдоль нити в сторону точки подвеса (рис. 2.5).

Рис. 2.5. Направление натяжения нити
Пример. На груз маятника действуют две силы: тяжести \(\vec G\) и натяжения нити \(\vec T\) (рис. 2.6). Согласно правилу параллелограмма, они имеют равнодействующую, которая в положении, указанном на рисунке, направлена вниз и налево. Поэтому маятник, выведенный из вертикального положения и предоставленный сам себе, начнет двигаться в обозначенную сторону.

Цилиндрический шарнир (подшипник). Эта связь соединяет два тела так, что одно может вращаться относительно другого вокруг оси, называемой осью шарнира. Считается, что реакция \(\vec R\) шарнира лежит в плоскости, перпендикулярной его оси; но заранее определить направление реакции в этой плоскости, как правило, нельзя. Дело в том, что подобное закрепление тела не позволяет ему двигаться в любом направлении, перпендикулярном указанной оси.
Пример. Соединение двери и косяка с помощью петель (рис. 2.7) можно считать шарниром. Действительно, прикладывая усилие, перпендикулярное оси вращения, нельзя «сдернуть» дверь с петель, не повредив косяка.

В двух предыдущих случаях (опора и нить) задача об определении реакции связи содержала одну неизвестную величину – модуль (числовое значение) реакции. В случае цилиндрического шарнира искомых величин две – надо узнать еще и направление реакции в плоскости вращения. Но выбирают неизвестные разными способами, в зависимости от удобства.
Во-первых, можно искать модуль реакции R и угол α, образуемый данным вектором с какой-либо прямой в плоскости вращения. Если ввести в этой плоскости систему координат, этой прямой может быть, например, ось абсцисс, как на рис. 2.8 а). Во-вторых, можно разложить искомый вектор \(\vec R\) на две составляющие, направленные вдоль осей координат, как на рис. 2.8 б). Тогда потребуется найти числовую величину каждой из составляющих.

Рис. 2.8. Тело AB закреплено в точке А с помощью цилиндрического шарнира
Сферический шарнир соединяет тела так, что они могут вращаться друг относительно друга вокруг одной точки – центра шарнира (рис. 2.9).

Указанная точка не может совершить никакого перемещения относительно обоих тел. Поэтому реакция сферического шарнира в пространстве может иметь любое направление. Аналогично цилиндрическому шарниру, при решении задач эту реакцию часто раскладывают на три компоненты, направленные вдоль координатных осей (рис. 2.10).

Рис. 2.10. Сферический шарнир A реагирует на тело AB с силой \(\vec R\), которая раскладывается на компоненты \(\vec X_\), \(\vec Y_\) и \(\vec Z_\)
Частным случаем сферического шарнира является подпятник – подшипник с упором. Его схематичное изображение представлено на рис. 2.11.

Рис. 2.11. Тело AB в точке A связано подпятником
Реакция подпятника также имеет произвольное направление в пространстве.
Подвижный шарнир. Конструктивно эта связь представляет собой цилиндрический или сферический шарнир, соединяющий тело с некоторой поверхностью и способный перемещаться по ней. Такая способность может достигаться водружением шарнира на катки (из-за чего его также называют опорой на катках). Поскольку шарнир не препятствует движению тела вдоль поверхности, его реакция направлена перпендикулярно ей (рис. 2.12).

Рис. 2.12. Реакция подвижного шарнира
Пример. Подвижные шарниры могут использоваться при строительстве металлических мостов. Если оба конца такого моста закрепить неподвижно, то летом, удлинняясь при повышении температуры, мост будет выгибаться дугой (рис. 2.13 а). Зимой при охлаждении конструкция станет сужаться, пытаясь сорвать крепления (рис. 2.13 б).

Рис. 2.13. Металлический мост при нагревании и охлаждении
Такие деформации малозаметны, но, повторяясь из года в год, они могут не только привести в негодность дорожное покрытие, но и вызвать разрушение самого моста. Поэтому один из неподвижных шарниров заменяют подвижным (рис. 2.14). Это дает мосту возможность растягиваться и сжиматься без катастрофических последствий.

C математической точки зрения подвижный шарнир полностью аналогичен опоре: реакции обеих связей перпендикулярны рассматриваемой поверхности. Тем не менее, из-за его конструктивных особенностей подвижный шарнир лучше рассматривать отдельно.
Невесомый стержень служит для соединения двух тел; предполагается, что к обоим телам он прикреплен шарнирами (как правило, сферическими, если тела рассматриваются в пространстве, и цилиндрическими, если речь идет о плоской задаче). Аналогично нити, толщина стержня обычно много меньше его длины, и ее не берут в расчет. Кроме того, как понятно из названия, весом такого стержня по сравнению с наложенной на него нагрузкой можно пренебречь.
Замечание. «Невесомость» стержня – это очередная идеализация. Металлические стержни, составляющие каркас многих строительных конструкций, могут иметь массу в десятки и сотни килограммов (соответственно, их вес может составлять тысячи ньютонов). Но они воспринимают нагрузку во много раз большую: например, достаточно сравнить массу металлической арматуры со всей массой железобетонной плиты. Поэтому весом стержней зачастую пренебрегают.
Реакция \(\vec S\) прямого невесомого стержня, имеющего шарнирное закрепление, направлена вдоль самого стержня. Действительно, пусть стержень AB соединяет два тела: AC и BC (рис. 2.15).

Рис. 2.15. Определение направления реакции прямого стержня
Это значит, что к нему приложены две силы – в точках A и B. Поскольку стержень неподвижен, они находятся в равновесии. Согласно первой аксиоме статики, это значит, что эти силы направлены вдоль стержня. По закону равенства действия и противодействия, стержень реагирует на это воздействие с силой, равной по модулю, но противоположной по направлению. Поэтому реакция также направлена вдоль стержня.
Рассуждая аналогичным образом, легко показать, что реакция криволинейного шарнирно закрепленного стержня направлена вдоль хорды, соединяющей его концы (рис. 2.16).

Рис. 2.16. Определение направления реакции изогнутого стержня
Следует учитывать, что имеется два возможных направления реакции данной связи; выбор конкретного направления зависит как от состояния, в котором находится стержень, так и от того, в каком из концов тела эта реакция рассматривается. Так, выше на рис. 2.15 и рис. 2.16 изображены случаи, в которых стержень сжат (например, он удерживает плиту BC от падения на горизонтальную поверхность AC). Противодействуя этому сжатию, он стремится растянуться, поэтому реакция \(\vec S\) в точке B направлена в сторону от стержня. Если стержень растянут (например, он скрепляет тела AC и BC, а мы стараемся оторвать одно тело от другого), то он попытается сжаться, и направление вектора \(\vec S\) следует изменить на противоположное – развернуть его внутрь стержня.
Иногда можно рассматривать стержень как результат отвердевания нити. Например, с точки зрения теоретической механики безразлично, как груз маятника соединяется с часовым механизмом: с помощью тонкой нити или стержня. Тем не менее, между двумя этими связями существует разница. В отличие от нити, стержень не может сминаться. Кроме того, направление реакции нити определено однозначно, а реакция стержня может быть направлена двумя разными способами.
Существуют и другие виды связей, которые будут рассмотрены в Лекции 3.
2.3. Тело на гладкой наклонной плоскости
Ниже мы рассмотрим простой, но важный пример, на котором покажем последовательность решения задач о равновесии твердого тела.
Пусть груз веса P находится на гладкой плоскости, наклоненной к горизонту под углом α, и удерживается нитью, натянутой вдоль самой поверхности. Требуется найти реакцию плоскости N и натяжение нити T. Параметр α может меняться в пределах от 0° до 90°.
Разобьем решение на несколько этапов.
Выберем тело, равновесие которого будет рассматриваться (в нашем случае – груз) и сделаем первоначальный чертеж (рис. 2.17)

Изобразим силы, действующие на выбранное тело. В нашем случае на груз действует сила тяжести \(\vec G\), направленная вертикально вниз и численно равная его весу P. Движение груза ограничено двумя связями – поверхностью и нитью. Согласно принципу освобождаемости от связей, их можно отбросить, заменив реакциями – нормальной реакцией \(\vec N\) и натяжением \(\vec T\), соответственно (рис. 2.18).

Составим условия равновесия. Поскольку система сил, действующих на тело, сходится (мы пренебрегаем размерами груза), то условие равновесия выражается единственным векторным равенством:
| \(\vec G+\vec N+\vec T=\vec 0.\) | (2.1) |
Введем систему координат так, как показано на рис. 2.19: ось x направим параллельно поверхности, ось y – перпендикулярно ей.

Спроецируем обе части равенства (2.1) на оси координат и получим систему линейных уравнений относительно неизвестных N и T:
\begin | (2.2) | |
При нахождении проекций мы воспользовались известным из планиметрии фактом: если соответственные стороны двух углов перпендикулярны, то эти углы равны. Фактически это утверждение означает, что один угол получается из другого поворотом на 90° и последующим переносом в другое место на плоскости.
Горизонтальная прямая перпендикулярна линии действия силы \(\vec G\), оси x и y также перпендикулярны. Поэтому угол между вектором \(\vec G\) и отрицательным направлением оси y равен углу α между горизонтальной прямой и осью x.
В более сложных задачах, в которых к телу прикладывается большое количество сил, можно оформлять вычисление проекций на координатные оси в виде таблицы:
|
Уравнения в проекции на ту или иную ось получаются суммированием (с учетом знаков) всех слагаемых в соответствующей строке таблицы.
Решим полученную систему и проанализируем решение. Из (2.2) получаем, что T = P sin α, N = P cos α. Тем самым, реакции связей найдены; выясним, как они ведут себя в зависимости от угла α. При α = 0° получаем N = P, T = 0, что согласуется с чисто физическими соображениями: если опорная поверхность горизонтальна, то она полностью воспринимает вес груза, а удерживающая нить остается ненатянутой. При α = 90° (вертикальная поверхность) N = 0, T = P, т.е. груз удерживается только нитью, а поверхность его движению не препятствует.
В общем случае, если убрать нить (положить T = 0 независимо от веса P), то груз не будет находиться в равновесии. Действительно, проекция вектора \(\vec G+\vec N\) на ось y равна нулю, а на ось x она составляет –P sin α. При α ≠ 0° эта проекция меньше нуля, а значит, тело станет двигаться в сторону, противоположную оси y (вниз).
Из нашего решения и закона равенства действия и противодействия следует, что сила давления груза на опорную плоскость равна P sin α, а на нить – P cos α. Если максимально допустимые для опоры и нити нагрузки меньше указанных значений, то связи не выдержат указанного давления: плоскость может деформироваться или разрушиться, а нить – оборваться.
Замечание. Направление координатных осей выбирается из соображений удобства. Как правило, они проводятся параллельно или перпендикулярно неизвестным реакциям. Это сводит к минимуму число неизвестных проекций; тем самым, уравнения типа (2.2) упрощаются. Оси координат можно было бы провести и каким-либо другим образом. Например, ось x можно было бы направить по горизонтали направо, а ось y – вертикально вверх; их можно было бы ориентировать относительно сил совершенно произвольным образом. Конечный ответ задачи при этом бы не изменился, но нахождение проекций и последующее решение системы уравнений усложнилось бы. Приемы упрощения уравнений равновесия с помощью выбора системы координат излагаются далее в п. 4.3.
Вопросы для самоконтроля
- В чем состоит принцип освобождаемости от связей?
- Предположим, что помимо реакций опоры, на балку на рис. 2.4 действует сила тяжести, приложенная к ее середине и направленная вниз. Может ли балка под действием полученной системы сил остаться в равновесии: в случае а); в случае б)? Ответ пояснить. Поверхности считаются гладкими.
Груз располагается на конце невесомого стержня, который с помощью цилиндрического шарнира закреплен в неподвижной точке A. Стержень отклонили от вертикали на угол α (рис. 2.20). При каких значениях α груз будет находиться в равновесии? Что изменится, если заменить стержень нитью?

Задачи к лекции
Лампа веса 40 Н подвешена к потолку на двух одинаковых цепочках длины 26 см каждая. Расстояние между точками их подвеса составляет 40 см (рис. 2.21). Найти натяжение каждой из цепочек.

Прибор веса 1200 Н хотят установить на легкую треногу, каждая из ножек которой имеет длину 2 м. В рабочем состоянии основания ножек образуют правильный треугольник со стороной 1 м (рис. 2.22). Выдержит ли тренога нагрузку, создаваемую прибором, если каждая из ее опор рассчитана на максимальную нагрузку 380 Н?

Ответы. 1. 52 Н. 2. Не выдержит: нагрузка на каждую опору составит около 417.79 Н.
Также рекомендуется решить задачи из §§1, 2, 6 [2].
Источник



