
- Способы задания поверхности примеры
- Способы задания поверхностей
- Лекция 7. Поверхности
- 7.1. Поверхности. Образование и задание поверхности на чертеже
- 7.2. Поверхности вращения
- 7.3. Цилиндрическая поверхность
- 7.4. Пересечение прямой с поверхностью прямого кругового цилиндра
- Упражнение
- 7.5. Пересечение прямой с поверхностью наклонного цилиндра
- Упражнение
- 7.6. Сферическая поверхность
- Упражнение
- 7.7. Пересечение прямой с поверхностью сферы
- Упражнение
- 7.8. Коническая поверхность
- 7.9. Пересечение прямой с поверхностью конуса
- 7.10. Пересечение цилиндра плоскостью
- 7.11. Пересечение сферы плоскостью
- 7.12. Пересечение конуса плоскостью
- 7.13. Задачи для самостоятельной работы
Способы задания поверхности примеры
Поверхность рассматривается как геометрическое место точек, координаты которых удовлетворяют некоторому заданному уравнению вида F(x,y,z)=0 (рис. 48, а, б, в). Порядок уравнения соответствует порядку поверхности. Порядок поверхности можно определить и геометрически, как порядок кривой, по которой плоскость пересекает поверхность, или как число точек пересечения прямой с поверхностью.




б – гиперболоид однополостный

в – гиперболический цилиндр

Аналитический способ задания поверхности находит широкое применение в практике, особенно если требуется исследовать свойства поверхности.
Кинематическую поверхность можно рассматривать как непрерывную совокупность последовательных положений линии, перемещающейся в пространстве по некоторым неподвижным линиям. Таким образом, на любой кинематической поверхности можно выделить два семейства линий: семейство образующих и семейство направляющих. Направляющие и образующие обладают следующим свойством: никакие две линии одного семейства не пересекаются между собой, но каждая линия одного семейства пересекает все линии другого.
Рассмотрим формирование конической поверхности (рис. 49). Такая поверхность образована движением прямой образующей l, постоянно проходящей через точку S и во всех своих положениях пересекающей некоторую направляющую кривую m. Если направляющая m – окружность, каждая точка которой равноудалена от вершины S, образуется прямой круговой конус.
Совокупность точек, линий и различных условий, определяющих закон перемещения образующей, называют также определителем поверхности. Например, определителем конуса вращения могут быть ось и образующая или вершина и направляющая линия. Определителем цилиндра вращения может быть ось и образующая (прямая или кривая) или ось и направляющая (окружность). Окружность может быть и направляющей линией цилиндра и его образующей. В начертательной геометрии все поверхности рассматриваются как кинематические, то есть образованные непрерывным перемещением в пространстве какой – либо линии или поверхности.


Поверхности, к которым нельзя применить математические закономерности или поверхности с произвольными образующими называются скульптурными или поверхностями произвольных форм (рис. 50). Такие поверхности обычно задают достаточно плотной сетью линий и точек, принадлежащих этим поверхностям. Совокупность таких линий называется каркасом поверхности. При этом точки, лежащие между линиями каркаса, определяются приближенно.

Одним из наиболее распространенных в промышленности методов конструирования поверхностей является метод конструирования с помощью непрерывного каркаса. Метод каркасного конструирования используется при изготовлении кузовов автомобилей, самолетов и в судостроении, для выполнения штампов при изготовлении поверхностей из листового материала, в топографии, горном и дорожном деле.
Источник
Способы задания поверхностей
Поверхность, образованная каким-либо способом, считается заданной, если относительно произвольной точки пространства можно однозначно решить вопрос о ее принадлежности данной поверхности. Для поверхности, заданной на чертеже, это условие становится следующим: поверхность считается заданной, если по одной проекции точки, принадлежащей поверхности, можно построить вторую проекцию. Совокупность условий, необходимых для задания поверхности, называется определителем поверхности. Он состоит из геометрической и алгоритмической частей. Геометрическая часть определителя – это перечень геометрических элементов и фигур, которые участвуют в образовании поверхности. Алгоритмическая часть определителя описывает взаимосвязи между элементами и фигурами, входящими в геометрическую часть, а также представляет совокупность правил, по которым образуется поверхность. Например, поверхность сферы можно образовать, вращая некоторую точку вокруг другой неподвижной точки (центра сферы) и поворачивая при этом плоскость вращения вокруг оси, проходящей через центр сферы. В этом случае в геометрическую часть определителя войдут две точки, а в алгоритмическую часть – описание правил вращения одной точки вокруг другой.
Следует иметь в виду, что при задании поверхности можно в ряде случаев вместо геометрических элементов задавать числовые параметры. Например, сферу можно было бы задать центром и величиной радиуса. Для задания конуса вращения необходимо определить ось вращения и величину угла между образующей конуса и осью. Такие параметры поверхности принято разделять на параметры формы и положения. Параметры, изменение которых приводит к изменению формы поверхности, называются параметрами формы. Если же при изменении параметра меняется положение поверхности в пространстве, то такой параметр относят к параметрам положения. В случае задания сферы ее радиус является параметром формы, а координаты центра сферы – параметрами положения. Число независимых параметров поверхности называется ее параметрическим числом.
Существует три наиболее распространённых способа задания поверхностей: аналитический, графический и графоаналитический. Рассмотрим каждый из этих способов.
Аналитический способ. В этом случае поверхность рассматривается как геометрическое место точек, координаты которых удовлетворяют заданному уравнению вида:
F(x, y, z) = 0или z = Ф(х, у),
где Fи Ф — алгебраическая или трансцендентная функция.
Поверхность также может задаваться системой уравнений, определяющих зависимость координат точек поверхности от некоторого параметра:
 x = X(t)
x = X(t)
y = Y(t)
z = Z(t).
Такой способ задания называется параметрическим.
Широкое распространение в последнее время получила векторная форма задания поверхности, в этом случае поверхность определяется вектор-функцией R некоторой точки N, принадлежащей поверхности. Эта функция зависит от двух скалярных аргументов u и v:
R = R(u,v) = x(u,v)i + y(u,v)j + z(u,v)k,
где x,y,z – координаты вектор-функции. Параметры u и v называются криволинейными координатами поверхности. Каждой паре значений u, v из области их изменения соответствует точка поверхности, координаты которой определяются функциями
x = x(u,v), y = y(u,v), z = z(u,v).
Если один из параметров принять постоянным, например, задаться v=v1, то вектор функции R=R(u,v1) опишет на поверхности некоторую линию v1=const, называемую координатной линией. Переходя к другому значению v=v2, получим следующую линию семейства v2=const. Совокупность линий vi=const (i=1, …, m) образует линейный каркас поверхности (линейным каркасом поверхности называется множество линий, заполняющих поверхность так, что через каждую точку поверхности проходит в общем случае одна линия этого множества).
Аналогично, фиксируя u и изменяя v, можно получить координатную линию u=const.Множество линий uj=const (j=1, . n) образует другой линейный каркас той же поверхности. Через каждую точку поверхности можно провести две координатные линии (одну – семейства uj=const, другую – vi=const).Совокупность двух линейных каркасов образует сетчатый каркасповерхности или сеть.
Векторная форма задания поверхностей часто используется для задания кинематических поверхностей. Действительно, пусть образующая линия поверхности задана параметрически в виде r = r(u). Вводя второй параметр v, определяющий перемещение образующей в пространстве, можно получить сетчатый каркас поверхности, описывающийся уравнением r =r (u,v). Причем линии каркаса vi = const в этом случае представляют собой семейство образующих, а линии каркаса uj =const — семейство направляющих линий поверхности (рис.9.2).

Графический способзадания поверхностей предполагает задание поверхности на комплексном чертеже. При этом, как уже было сказано выше, поверхность считается заданной, а ее чертеж – метрически определенным, если по одной проекции точки, лежащей на поверхности, можно построить другую ее проекцию. Чаще всего поверхность задается на чертеже проекциями элементов своего определителя, т.е. тех геометрических объектов, с помощью которых поверхность была образована. Алгоритмическая часть определителя поверхности переводится при этом в алгоритм графических и аналитических операций, которые необходимо осуществить над проекциями элементов определителя, чтобы построить проекции произвольных точек или линий поверхности. Однако наглядность такого чертежа поверхности очень низкая. Для улучшения наглядности чертеж поверхности приходится дополнять проекциями наиболее характерных или важных точек и линий поверхности, в том числе очерковымилиниями ее проекций. Очерковыми линиями (или очерком) проекций поверхности называются линии, ограничивающие области ее проекций (рис.9.3).

Часто поверхность задается на чертеже некоторой совокупностью ее точек (называемой точечным каркасом поверхности) или линий (линейный или сетчатый каркас). Например, поверхность, образованная кинематическим способом, может задаваться на чертеже проекциями семейства направляющих линий и семейства образующих линий. Однако в этом случае поверхность будет не вполне определена, так как между точками и линиями каркаса поверхность не задается. Поэтому построить промежуточные точки и линий поверхности можно лишь приближенно. Для придания однозначности чертежу поверхности обычно пользуются одним из двух способов:
1. Задается алгоритм графических операций перехода от заданных линий каркаса к промежуточным линиям.
2. С помощью аналитических методов аппроксимации и какого-либо класса моделирующих функций рассчитывают математическую модель поверхности, содержащую заданные точки и линии каркаса. Эту модель в дальнейшем используют для получения промежуточных точек и линий. Однако нужно иметь в виду, что точность результата во многом определяется выбранным классом моделирующих функций.
Графоаналитический способ. При этом способе задания поверхности часть линий (например, образующая поверхности) может задаваться аналитически в виде уравнения

где  – параметры образующей, а направляющие линии задаются графически, в виде графиков изменения параметров
– параметры образующей, а направляющие линии задаются графически, в виде графиков изменения параметров  в зависимости от значения третьей координаты z (рис.9.4). Тогда при необходимости получения положения некоторой образующей для
в зависимости от значения третьей координаты z (рис.9.4). Тогда при необходимости получения положения некоторой образующей для  определяют сначала значения параметров
определяют сначала значения параметров  , которые затем подставляются в уравнение образующей.
, которые затем подставляются в уравнение образующей.
Источник
Лекция 7. Поверхности
7.1. Поверхности. Образование и задание поверхности на чертеже
Поверхности составляют широкое многообразие объектов трехмерного пространства. Инженерная деятельность человека связана непосредственно с проектированием, конструированием и изготовлением различных поверхностей. Большинство задач прикладной геометрии сводится к автоматизации проектно-конструкторского процесса и воспроизведения сложных поверхностей. Способы формообразования и отображения поверхностей составляют основу инструментальной базы трехмерного моделирования современных систем автоматизированного проектирования.
Рассматривая поверхности как непрерывное множество точек, между координатами которых может быть установлена зависимость, определяемая уравнением вида F(x,y,z)=0, можно выделить алгебраические поверхности (F(x,y,z)— многочлен n-ой степени и трансцендентные (F(x,y,z)— трансцендентная функция.
Если алгебраическая поверхность описывается уравнением n-й степени, то поверхность считается поверхностью n-го порядка. Произвольно расположенная секущая плоскость пересекает поверхность по кривой того же порядка (иногда распадающейся или мнимой), какой имеет исследуемая поверхность. Порядок поверхности может быть определен также числом точек её пересечения с произвольной прямой, не принадлежащей целиком поверхности, считая все точки (действительные и мнимые).
Поверхность можно рассматривать, как совокупность последовательных положений l1,l2… линии l перемещающейся в пространстве по определенному закону (Рисунок 7.1). В процессе образования поверхности линия l может оставаться неизменной или менять свою форму — изгибаться или деформироваться. Для наглядности изображения поверхности на эпюре Монжа закон перемещения линии l целесообразно задавать графически в виде одной линии или целого семейства линий (m, n, p…).
Подвижную линию принято называть образующей (li), неподвижные – направляющими (m). Такой способ образования поверхности принято называть кинематическим .
Примером такого способа могут служить все технологические процессы обработки металлов режущей кромкой, когда поверхность изделия несёт на себе «отпечаток» режущей кромки резца, т.е. её поверхность можно рассматривать как множество линий конгруэнтных профилю резца.
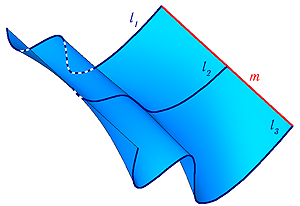
Рисунок 7.1 — Кинематическая поверхность
По виду образующей различают поверхности линейчатые и нелинейчатые , образующая первых – прямая линия, вторых – кривая.
Линейчатые поверхности в свою очередь разделяют на развертывающиеся , которые можно без складок и разрывов развернуть на плоскость и неразвертывающиеся .
Значительный класс поверхностей формируется движением окружности постоянного или переменного радиуса. Такие поверхности носят название циклические (Рисунок 7.2).
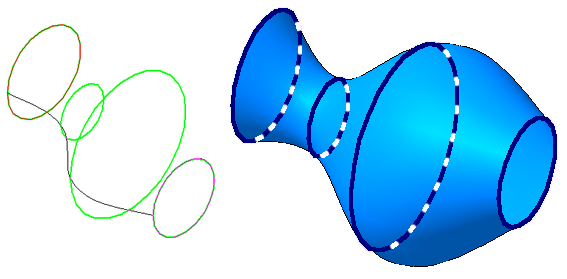
Рисунок 7.2 — Циклическая поверхность
Если группировать поверхности по закону движения образующей линии, то большинство встречающихся в технике поверхностей можно разделить на:
- поверхности вращения;
- винтовые поверхности;
- поверхности с плоскостью параллелизма;
- поверхности параллельного переноса.
Особое место занимают такие нелинейные поверхности, образование которых, не подчинено ни какому закону. Оптимальную форму таких поверхностей определяют теми физическими условиями, в которых они работают и устанавливают форму экспериментально (поверхности лопастей турбин, обшивка каркасов морских судов и самолетов).
Для графического изображения поверхности на чертеже используется её каркас.
Множество линий, заполняющих поверхность так, что через каждую точку поверхности проходит в общем случае одна линия этого множества, называется каркасом поверхности .
Поверхность может быть задана и конечным множеством точек, которое принято называть точечным каркасом .
Проекции каркаса могут быть построены, если задан определитель поверхности – совокупность условий, задающих поверхность в пространстве и на чертеже.
Различают две части определителя: геометрическую и алгоритмическую.
Геометрическая часть определителя представляет собой набор постоянных геометрических элементов (точек, прямых, плоскостей и т.п.), которые могут и не входить в состав поверхности.
Вторая часть – алгоритмическая (описательная) – содержит перечень операций, позволяющий реализовать переход от фигуры постоянных элементов к непрерывному каркасу.
Например, циклическая поверхность, каркас которой состоит из восьмиугольников (Рисунок 7.3), может быть задан следующим образом:
- Геометрическая часть определителя: три направляющих l, m, n.
- Алгоритмическая часть: выбираем плоскость α; находим точки А, В, С, в которых α пересекает соответственно направляющие l, m, n. Строим восьмиугольник, определяемый тремя найденными точками. Переходим к следующей плоскости и повторяем построение
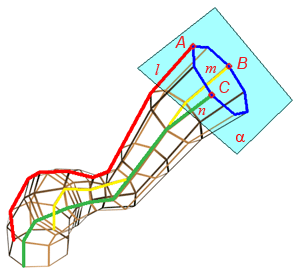
Рисунок 7.3 –Образование циклической поверхности
7.2. Поверхности вращения
Поверхностями вращения называются поверхности, полученные вращением образующей вокруг неподвижной оси (Рисунок 7.5).
Цилиндрическая и коническая поверхности бесконечны (т.к. бесконечны образующие); сферическая, торовая поверхности — конечны.
Сферическая поверхность – частный случай торовой поверхности. При вращении окружности вокруг осей б, в, г (Рисунок 7.4, а) получим торовую поверхность (Рисунок 7.4, б), а вокруг оси а – сферическую.
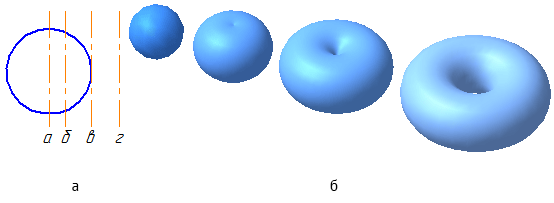
Рисунок 7.4 – Образование поверхностей вращения
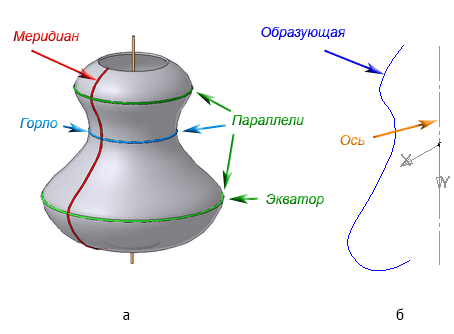
Рисунок 7.5 – Элементы поверхности вращения
Каждая точка образующей линии при вращении вокруг оси описывает окружность, которая располагается в плоскости, перпендикулярной оси вращения. Эти окружности называются параллелями (Рисунок 7.5).
Наименьшая параллель называется горлом , наибольшая – экватором .
Линия пересечения поверхности вращения плоскостью, проходящей через ось, называется меридианом .
Линия пересечения поверхности вращения плоскостью, проходящая через ось, параллельно фронтальной плоскости проекций, называется главным меридианом .
7.3. Цилиндрическая поверхность
Цилиндрическая поверхность образуется движением прямой линии, которая в любом своём положении параллельна данному направлению и пересекает криволинейную направляющую (Рисунок 7.6).
Цилиндр – геометрическое тело, ограниченное замкнутой цилиндрической поверхностью и двумя параллельными плоскостями, пересекающими все образующие данной поверхности.
Взаимно параллельные плоские фигуры, ограниченные цилиндрической поверхностью, называются основаниями цилиндра .
Если нормальное сечение (плоскость сечения перпендикулярна образующим) имеет форму окружности, то цилиндрическая поверхность называется круговой .
Если образующие цилиндрической поверхности перпендикулярны к основаниям, то цилиндр называется прямым, в противном случае – наклонным .
Рассмотрим проецирование прямого кругового цилиндра и принадлежащей ему точки F.
Условимся, что фронтальная проекция точки F – невидима (Рисунок 7.6).
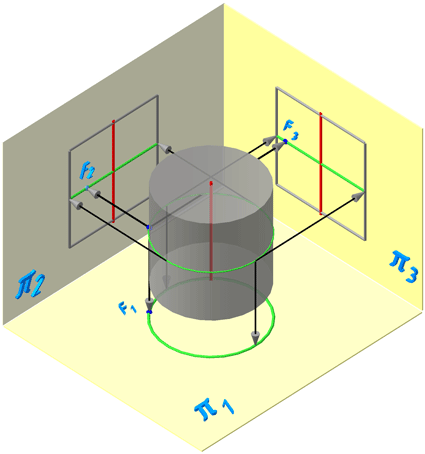
Рисунок 7.6 – Проецирование цилиндра на плоскости проекций
Горизонтальная и профильная проекции точки F будут видимы.
При определении видимости, образующие, которые находятся на части, обращённой к наблюдателю и обозначенной на π1 сплошной зелёной линией – на плоскости проекции π2 видны, а которые находятся на части, обозначенной толстой штриховой линией – видны на π3.
Пусть точка А на π2 видима (Рисунок 7.7). Тогда на π1 она будет видима, а на π3 невидима.
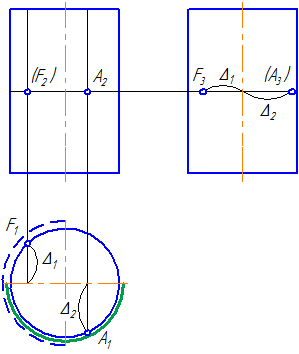
Рисунок 7.7 – Эпюр прямого кругового цилиндра и принадлежащих ему точек
7.4. Пересечение прямой с поверхностью прямого кругового цилиндра
Для построения точек пересечения прямой линии с поверхностью прямого кругового цилиндра не требуется дополнительных построений. На горизонтальной плоскости проекций точки пересечения (1 и 2) находятся сразу. Фронтальные проекции строим по линиям связи.
Но в общем случае, алгоритм решения рассмотрим на следующем упражнении.
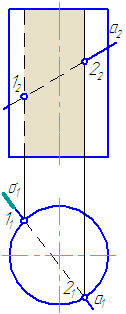
Рисунок 7.8 – Пересечение прямой с поверхностью прямого кругового цилиндра
Упражнение
Заданы: прямой круговой цилиндр с осью вращения, перпендикулярной плоскости проекций π1 и прямая а общего положения (Рисунок 7.8).
Построить точки пересечения прямой а с поверхностью цилиндра.
Для построения точек пересечения прямой с поверхностью цилиндра необходимо:
- Заключить прямую во вспомогательную секущую плоскость частного положения σ (горизонтально-проецирующую).
- Построить фигуру пересечения поверхности цилиндра горизонтально-проецирующей плоскостью: результат пересечения — четырехугольник (на π2 условно заштрихован).
- Найти точки «входа» и «выхода» прямой: на пересечении её фронтальной проекции с фронтальными проекциями сторон четырёхугольника (они же — проекции образующей цилиндра);
Прямая а пересекается со сторонами сечения в двух точках – 1 и 2.
Определим видимость участков прямой: очевидно, что между точками 1-2 прямая невидима, а на плоскости проекций π2 будет ещё невидим участок прямой от точки 1 до левой крайней образующей.
7.5. Пересечение прямой с поверхностью наклонного цилиндра
Упражнение
Заданы : наклонный круговой цилиндр с осью вращения, наклонной к плоскости проекций π1 и прямая mобщего положения (Рисунок 7.9).
Построить точки пересечения прямой mс поверхностью цилиндра.
Решение :
Для построения точек пересечения прямой с поверхностью цилиндра необходимо:
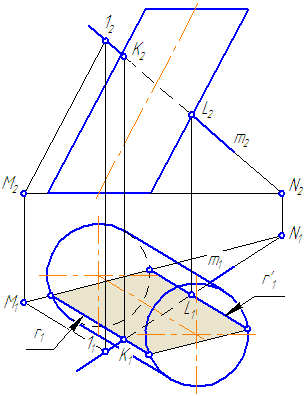
Рисунок 7.9 – Пересечение прямой с наклонным цилиндром
- Заключить прямую m во вспомогательную плоскость σ, дающую в сечении наиболее простую фигуру – четырехугольник (σ параллельна оси цилиндра или образующим). Эту плоскость зададим двумя пересекающимися прямыми m∩(1M);
- Построить горизонтальный след плоскости σ (прямую пересечения σ с плоскостью проекций π1) как проходящую через горизонтальные следы прямых m и (1M) (точки пересечения прямых с плоскостью проекций π1 (основания)) – (MN);
- Найти точки пересечения MN с окружностью основания цилиндра. Через эти точки провести образующие r, по которым плоскость σ пересекает боковую поверхность цилиндра:
На анимации ниже представлена последовательность построения точек пересечения прямой с наклонным цилиндром.
7.6. Сферическая поверхность
Сферическая поверхность – поверхность, образованная вращением окружности вокруг отрезка, являющегося её диаметром.
Шаром называется тело, ограниченное сферической поверхностью.
Экватор – это окружность, которая получается пересечением сферы горизонтальной плоскостью, проходящей через ее центр (Рисунок 7.10).
Меридиан – это окружность, которая получается пересечением сферы плоскостью, перпендикулярной плоскости экватора и проходящей через центр сферы.
Параллелями называются окружности, которые получаются пересечением сферы плоскостями, параллельными плоскости экватора.
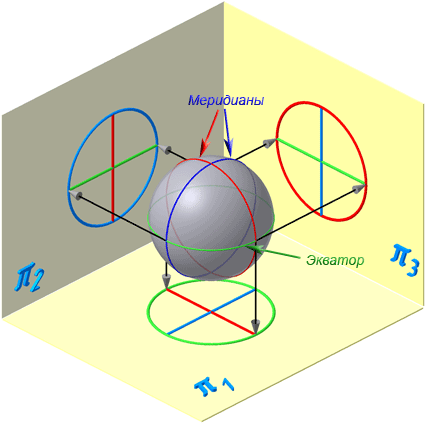
Рисунок 7.10 – Проецирование сферической поверхности
Прямоугольная проекция шара (сферы) на любую плоскость – есть окружность, которую часто называют очерковой .
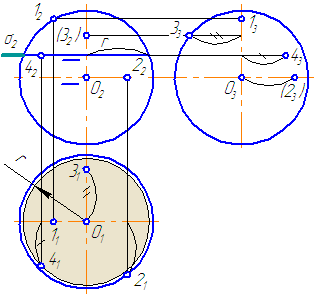
Рисунок 7.11 – Эпюр сферы и принадлежащих ей точек
Упражнение
Заданы: сферическая поверхность тремя проекциями (Рисунок 7.11) и фронтальные проекции точек 1, 2, 3, 4.
Необходимо построить горизонтальные и профильные проекции заданных точек.
- Проанализируем их расположение на поверхности сферы. Точки 1, 2, 3 лежат на очерковых образующих сферы.
- Точка 1 принадлежит главному меридиану (очерковой окружности на π2), проекция которого на π1 совпадает с проекцией горизонтальной оси, на π3 – с проекцией вертикальной оси.
- Недостающие проекции точки 1 находим посредством линий проекционной связи. Все проекции точки 1 видимы.
- Рассмотрим положение точки 2. Точка 2 принадлежит экватору (очерковой окружности на π1), проекции которого на π2 и π3 совпадают с проекцией горизонтальной оси. Горизонтальная проекция точки 2 строится посредством линии проекционной связи, для построения профильной проекции необходимо измерить расстояние, отмеченное дугой, и отложить его по линии связи от точки О3 вправо. Профильная проекция точки 2 невидима.
- Точка 3 принадлежит очерковой окружности на π3, которая также является меридианом, проекции которого на π2 и π1 совпадают с проекцией вертикальной оси. Профильная проекция точки строится посредством линии проекционной связи. Для построения горизонтальной проекции точки 3 необходимо расстояние, отмеченное на π3 двумя засечками, отложить на π1 вверх от точки О1. Горизонтальная и профильная проекции точки 3 видимы.
- Для построения проекций точки 4 необходимо ввести вспомогательную секущую плоскость (зададим плоскость σ//π1 и σ⊥π2). Плоскость σ пересекает поверхность сферы по окружности радиусом r. На π1 строим данное сечение и по линии проекционной связи находим 41. Для построения профильной проекции необходимо расстояние, отмеченное засечкой, отложить по линии проекционной связи на π3 вправо от оси. Все проекции точки 4 видимы.
7.7. Пересечение прямой с поверхностью сферы
Упражнение
Заданы: сфера и прямая общего положения АВ.
Найти: точки пересечения прямой с поверхностью сферы (точки «входа» и «выхода»).
Чтобы найти точки пересечения прямой с поверхностью сферы необходимо:
- Заключить прямую во вспомогательную плоскость, пересекающую поверхность сферы так, чтобы получались простые фигуры (например, круг, ограниченный окружностью);
- Построить фигуру пересечения сферы вспомогательной плоскостью;
- Найти общие точки прямой и контура фигуры (окружность): так как прямая и окружность лежат в одной плоскости, то они, пересекаясь, образуют точки, общие для прямой и сферы, которые и будут являться искомыми точками (Рисунок 7.12).
- Через прямую проводим плоскость σ. Пусть σ⊥π1 и пересекает сферу по окружности радиусом r. С – центр окружности сечения ОС⊥σ:
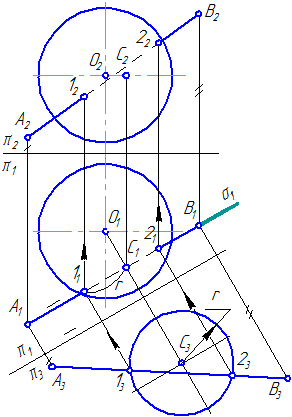
Рисунок 7.12 – Пересечение прямой с поверхностью сферы
- Введём π3⊥π1 и π3//σ1. Построим проекцию окружности сечения на π3 и проекцию А3В3.
- Находим точки их пересечения 12 и 23.
- Определим видимость участков прямой.
- На π1 точки 1 и 2 находятся на переднем полушарии, следовательно, на π2 они видимы.
7.8. Коническая поверхность
Коническая поверхность образуется движением прямой линии (образующей), которая в любом своем положении проходит через неподвижную точку и пересекает криволинейную направляющую (имеет две полости).
Тело, ограниченное замкнутой конической поверхностью вершиной и плоскостью, называется конусом .
Плоская фигура, ограниченная конической поверхностью, называется основанием конуса .
Часть конической поверхности, ограниченная вершиной и основанием, называется боковой поверхностью конуса .
Если основание конуса является кругом, то конус называется круговым .
Если вершина конуса расположена на перпендикуляре к основанию, восстановленному из его центра, то конус называется прямым круговым .
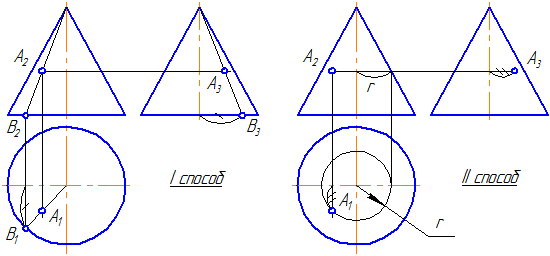
Рисунок 7.13 – Принадлежность точки конической поверхности
Рассмотрим вопрос принадлежности точки А поверхности конуса.
Дана фронтальная проекция точки А и она видима (Рисунок 7.13).
1 способ . Для построения ортогональных проекций точки, расположенной на поверхности конуса, построим проекции образующей, проходящей через данную точку. При таком положении точки А все её проекции – видимы.
2 способ . Точка А лежит на параллели конуса радиусом r. На π1 строим проекцию окружности (параллели) и по линии проекционной связи находим А1. По двум проекциям точки строим третью.
7.9. Пересечение прямой с поверхностью конуса
Пусть задан прямой круговой конус и прямая общего положения m (Рисунок 7.14). Найти точки «входа» и «выхода» прямой с поверхностью конуса.
- Через прямую m проводим вспомогательную секущую плоскость σ, дающую в сечении наиболее простую фигуру.
- Применение в качестве вспомогательной секущей плоскости проецирующей плоскости в данном случае нецелесообразно, так как в сечении получится кривая второго порядка, которую нужно строить по точкам.
Наиболее простая фигура – треугольник. Для этого секущая плоскость σ должна пройти через вершину S. Плоскость зададим с помощью двух пересекающихся прямых σ=SM∩MN или, что, то же самое, (σ=SM∩m).
- Возьмем на прямой m точку А и соединим её с вершиной. Прямая SA пересечёт плоскость основания в точке М.
- Построим горизонтальные проекции этих объектов.
- Продлим фронтальную проекцию прямой m до пересечения с плоскостью основания в точке N.
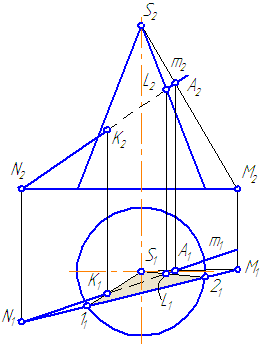
Рисунок 7.14 – Построение точек пересечения прямой с поверхностью конуса
- Построим её горизонтальную проекцию.
- Соединим точки M1N1, на пересечении с окружностью основания получим точки 1 и 2.
- Строим треугольник сечения конуса плоскостью σ, соединив точки 1 и 2 с вершиной S.
- На пересечении образующих 1-S и 2-S с прямой m получим искомые точки K и L.
- Определим видимость прямой относительно поверхности конуса.
На анимации ниже представлена последовательность построения точек пересечения прямой с поверхностью конуса.
7.10. Пересечение цилиндра плоскостью
Пусть плоскость сечения γ – фронтально-проецирующая (Рисунок 7.15).
- Если плоскость сечения γ параллельна оси цилиндра, то она пересекает цилиндр по четырехугольнику.
- Если плоскость сечения γ перпендикулярна оси цилиндра, то она пересекает цилиндр по окружности.
- Если плоскость сечения γ не параллельна и не перпендикулярна оси цилиндра в сечении эллипс.
Рассмотрим алгоритм построения сечения – эллипс (Рисунок 7.15):
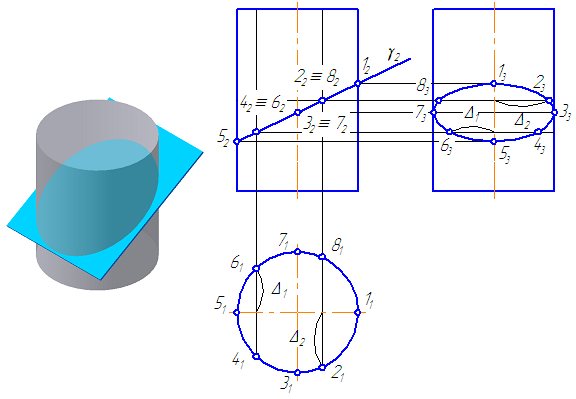
Рисунок 7.15 – пересечение цилиндра плоскостью
- Находим и строим характерные точки (точки, не требующие дополнительных построений) – в нашем случае, точки принадлежащие крайним образующим – 1, 3, 5, 7. Одновременно с этим, данные точки определяют величину большой и малой оси эллипса.
- Для построения участка эллипса необходимо построить не менее 5-ти точек (так как лекальная кривая второго порядка определяется как минимум пятью точками). Для построения точек 2, 4, 6, 8 возьмем на π1 произвольно расположенные образующие цилиндра, которые проецируются на данную плоскость проекции в точки.
- Построим вторые проекции данных образующих. Из точек пересечения вторых проекций образующих с проекцией плоскости сечения γ проводим линии связи к π3. Для построения третьей проекции, например, точки 6 измеряем расстояние Δ1 и откладываем его по соответствующей линии связи на π3. Симметрично ей, относительно оси вращения, строим точку 4. Аналогично строятся другие точки.
7.11. Пересечение сферы плоскостью
Плоскость пересекает поверхность сферы всегда по окружности. Задачу пересечения плоскости со сферой мы рассматривали при решении задачи построения точек пересечения прямой с поверхностью сферы (см. выше).
7.12. Пересечение конуса плоскостью
Рассмотрим пять возможных вариантов расположения плоскости относительно поверхности прямого кругового конуса. Пусть плоскость сечения перпендикулярна плоскости проекций π2 (Рисунок 7.16).
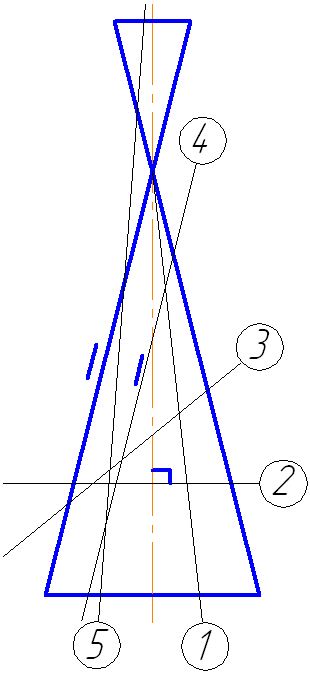
- Если плоскость проходит через вершину (1) – в сечении две образующие и прямая пересечения с плоскостью основания.
- Если плоскость перпендикулярна оси вращения конуса (2) – в сечении окружность.
- Если плоскость не параллельна ни одной образующей (пересекает все образующие (3)) – в сечении эллипс.
- Если плоскость параллельна одной образующей конуса – в сечении парабола (на примере – плоскость сечения (4) параллельна крайней образующей конуса).
- Если плоскость параллельна двум образующим (пересекает обе полости конической поверхности (5)) – в сечении гипербола (рисунок 7.17).
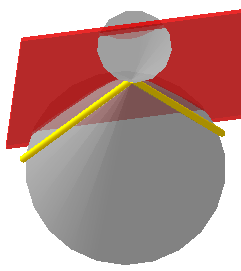
Рисунок 7.17. Плоскость сечения параллельна двум образующим конуса
Ниже, на моделях, представлены варианты положения секущей плоскости относительно поверхности конуса, при которых получаются сечения в виде эллипса, параболы и гиперболы.
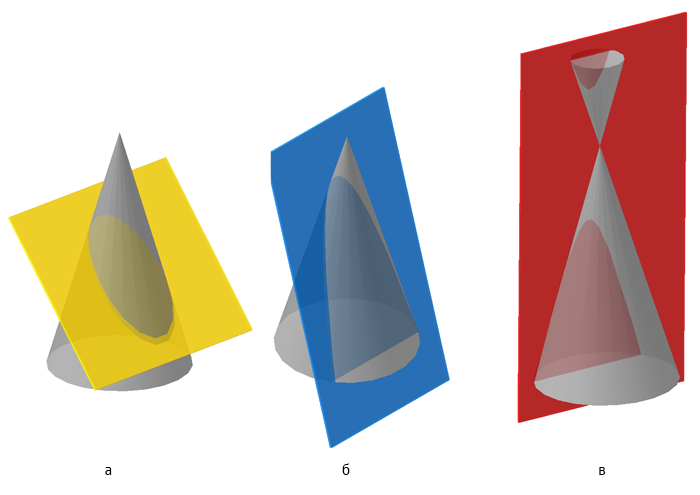
Рисунок 7.18 – Сечение конической поверхности плоскостью (а — эллипс, б — парабола, в — гипербола)
Рассмотрим пример построения сечения конической поверхности плоскостью.
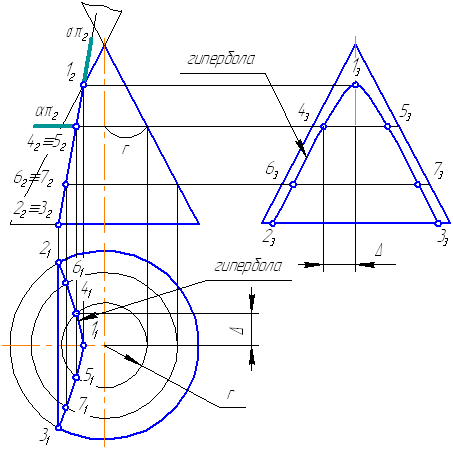
Рисунок 7.19 – Построение пересечения конической поверхности плоскостью
Пусть задана секущая проецирующая плоскость σ⊥π2 (Рисунок 7.19). Если продлить коническую поверхность и проекцию плоскости, то видно, что плоскость пересекает вторую ветвь конической поверхности, следовательно, в сечении получится гипербола.
- Построим характерные точки. Это точки, лежащие на крайних образующих и на окружности основания конуса (1, 2, 3). Их проекции строятся по линиям проекционной связи.
- Для построения промежуточных точек, воспользуемся методом вспомогательных секущих плоскостей. Введём плоскость α⊥π2 и перпендикулярно оси вращения, что даст в сечении окружность радиусом r. Строим эту окружность на π1. Плоскость α пересекает и заданную плоскость сечения по прямой, проекции которой на π1 и π3 совпадают с линиями проекционной связи.
- На пересечении этих двух сечений на плоскости проекций π1 строим точки 4, 5. Профильные проекции этих точек строим по линии проекционной связи, откладывая расстояние от оси вращения конуса, равное Δ.
- Аналогично строим точки 6, 7. Плавно соединим построенные точки, образуя гиперболу.
- Обведём то, что осталось от конуса после такого среза с определением видимости. В нашем примере все проекции построенной кривой будут видимы.
На анимации ниже представлена последовательность построения пересечения конической поверхности плоскостью.
7.13. Задачи для самостоятельной работы
1. Достроить проекции сферы с заданным вырезом (Рисунок 7.20).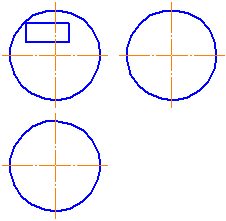
Рисунок 7.20
2-3. Построить три проекции конуса с призматическим отверстием (Рисунки 7.21, 7.22).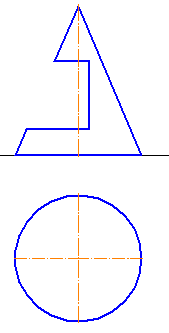
Рисунок 7.21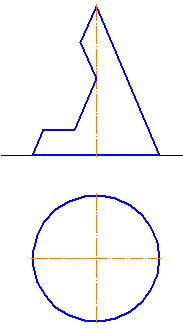
Рисунок 7.22
4. Построить точки «входа» и «выхода» прямой при пересечении её с поверхностью полусферы (Рисунок 7.23).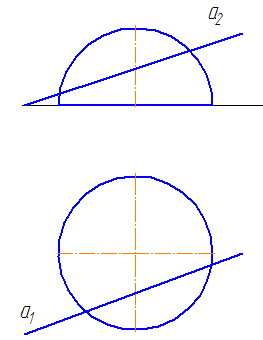
Рисунок 7.23
Источник



