
Термех / УМК статика.кинематика / лекции / статика / проба1
2.Основные задачи статики
3.Основные понятия и определения статики твердого тела
4. Момент силы относительно центра и оси
5.Способы вычисления момента силы относительно оси
6.Алгебраический момент силы относительно центра
Механика это наука, изучающая основные законы механического движения, т.е. законы изменения взаимного расположения материальных тел или частиц в сплошной среде с течением времени. Содержанием курса теоретической механики в техническом вузе является изучение равновесия и движения абсолютно твердых тел, материальных точек и их систем. Теоретическая механика является базой для многих обще-профессиональных дисциплин (сопротивление материалов, детали машин, теория машин и механизмов и др.), а также имеет самостоятельное мировоззренческое и методологическое значение. Иллюстрирует научный метод познания закономерностей окружающего нас мира – от наблюдения к математической модели, её анализ, получение решений и их применение в практической деятельности.
Курс теоретической механики традиционно делится на три части:
Статика изучает правила эквивалентного преобразования и условия равновесия систем сил.
Кинематика рассматривает движение тел с геометрической стороны, без учета сил, вызывающих это движение.
Динамика изучает движение тел в связи с действующими на них силами.

Основные задачи статики:
Изучение методов преобразования одних систем сил в другие, эквивалентные данным.
Установление условий равновесия систем сил.
Источник
ПроСопромат.ру
Технический портал, посвященный Сопромату и истории его создания
Момент силы относительно оси
Рассмотрим, как определяется момент силы относительно оси. Стремление силы вращать тело вокруг неподвижной оси зависит от величины силы, ее наклона и расстояния от оси.
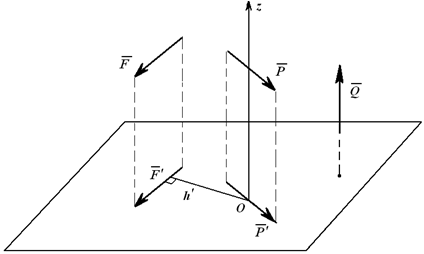
Из опыта известно, что силы, проходящие через ось, и силы, параллельные оси, НЕ МОГУТ ВЫЗВАТЬ ВРАЩЕНИЯ ТЕЛА вокруг этой оси. Посмотрим на рисунок.

Ни сила Р1, линия действия которой пересекает ось Oz, ни сила Р2, параллельная оси, не смогут повернуть тело вокруг этой оси.
Для вращательного эффекта силы относительно закрепленной оси вводится понятие момента силы относительно оси Мz (Р). Вращательный эффект силы относительно оси и выражается ее моментом.
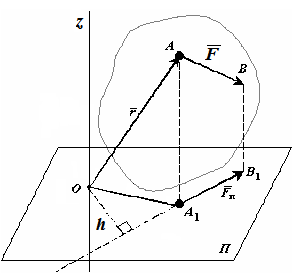
Пусть на тело в какой-то точке действует произвольная сила Р, не параллельная оси вращения Oz и не пересекающая эту ось. Проведем плоскость H, перпендикулярную оси Oz и проходящую через начало вектора силы. Разложим заданную силу Р на две составляющие: Р1, расположенную в плоскости H, и Р2, параллельную оси Oz.

Составляющая Р2, параллельная оси Oz момента относительно этой оси не создает. Составляющая Р1, действующая в плоскости H, создает момент относительно оси Oz или, что то же самое, относительно точки О. Момент силы Р1 измеряется произведением модуля самой силы на длину а перпендикуляра, опущенного из точки О на направление этой силы, т. е.

В выражение момента силы относительно оси входит не вся сила, а только ее составляющая, лежащая в плоскости, перпендикулярной оси вращения.
Знак момента по общему правилу определяется направлением вращения тела: (+) при движении по часовой стрелке, (—) при движении против часовой стрелки (правило условно). При определении знака момента наблюдатель должен непременно находиться со стороны положительного направления оси. На рисунке вверху момент силы Р относительно оси Oz положителен, так как для наблюдателя, смотрящего со стороны положительного направления оси (сверху), тело под действием заданной силы представляется вращающимся вокруг оси по ходу часовой стрелки.
На рисунке внизу момент силы Р относительно оси Oz — величина отрицательная.

Рассмотрим частный случай.

В частном случае момент силы Р, расположенной в плоскости H, относительно оси Oz, перпендикулярной этой плоскости, определится произведением полной величины силы Р на ее плечо l относительно точки пересечения оси Oz и плоскости H

Итак, для определения момента силы относительно оси нужно спроектировать силу на плоскость, перпендикулярную оси, и найти момент проекции силы на плоскость относительно точки пересечения оси с этой плоскостью.
Источник
iSopromat.ru

Момент силы относительно оси – это характеристика вращательного действия силы на тело, закрепленное на оси, т.е. алгебраический момент проекции этой силы на плоскость, перпендикулярную к оси, относительно точки пересечения оси с этой плоскостью (рисунок 2).
Момент силы относительно, например, оси Oz (рисунок 1), равен алгебраическому моменту проекции этой силы на плоскость, перпендикулярную этой оси ( F’) относительно точки пересечения оси с плоскостью, т.е.
Момент силы относительно оси – скалярная величина.
Моменты силы относительно координатных осей можно получить, расписав векторное произведение

Величины, стоящие в скобках, представляют собой моменты силы F относительно соответствующих осей.
Наш короткий видеоурок про момент силы с примерами:
Правило знаков
Момент считается положительным, если проекция силы на плоскость, перпендикулярную к оси, стремится вращать тело вокруг положительного направления оси против движения часовой стрелки, и отрицательным, если она стремится вращать тело по движению часовой стрелки:
где FП – вектор проекции силы F на плоскость П, перпендикулярную к оси Oz, точка O – точка пересечения оси Oz с плоскостью П, h — плечо силы.
Это значит, что момент считается положительным, если мы смотрим навстречу оси и видим проекцию силы, стремящуюся повернуть плоскость чертежа в направлении против хода часовой стрелки.
Момент силы относительно оси равен нулю, если линия действия силы пересекает ось, т.е. h=0 (например Mz(P)), или сила параллельна оси, т.е. ее проекция на плоскость равна нулю, например, Mz(Q).
Свойства момента силы относительно оси
Момент силы относительно оси обладает следующими свойствами:
- момент равен нулю, если сила параллельна оси. В этом случае равна нулю проекция силы на плоскость, перпендикулярную оси;
- момент равен нулю, если линия действия силы пересекается с осью. В этом случае равно нулю плечо силы.
Другими словами, момент силы относительно оси равен нулю, если сила и ось лежат в одной плоскости.
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
Источник
Момент силы относительно оси
Обозначив момент силы  относительно осей
относительно осей  ,
,  и
и  , можем записать:
, можем записать:

где  ,
,  и
и  модули проекций сил на плоскости, перпендикулярные той оси, относительно которой определяется момент; l – плечи, равные длинам
модули проекций сил на плоскости, перпендикулярные той оси, относительно которой определяется момент; l – плечи, равные длинам
перпендикуляров от точки пересечения оси с плоскостью до проекции или ее продолжения; знак «плюс» или «минус» ставится в зависимости от того, в какую сторону поворачивается плечо l вектором проекции, если смотреть на плоскость проекции со стороны положительного направления оси; при стремлении вектора проекции повернуть плечо против хода часовой стрелки момент условимся считать положительным, и наоборот.
Следовательно, моментом силы относительно оси называется алгебраическая (скалярная) величина, равная моменту проекции силы на плоскость, перпендикулярную оси, относительно точки пересечения оси с плоскостью.

Предыдущий рисунок иллюстрирует последовательность определения момента силы  относительно оси Z. Если задана сила и выбрана (или задана) ось, то: а) перпендикулярно оси выбирают плоскость (плоскость ХОУ); б) силу F проецируют на эту плоскость и определяют модуль
относительно оси Z. Если задана сила и выбрана (или задана) ось, то: а) перпендикулярно оси выбирают плоскость (плоскость ХОУ); б) силу F проецируют на эту плоскость и определяют модуль  этой проекции; в) из точки 0 пересечения оси с плоскостью опускают перпендикуляр ОС к проекции и определяют плечо l = ОС; г) глядя на плоскость ХОУ со стороны положительного направления оси Z (т.е. в данном случае сверху), видим, что ОС поворачивается вектором
этой проекции; в) из точки 0 пересечения оси с плоскостью опускают перпендикуляр ОС к проекции и определяют плечо l = ОС; г) глядя на плоскость ХОУ со стороны положительного направления оси Z (т.е. в данном случае сверху), видим, что ОС поворачивается вектором  против хода стрелки часов, значит
против хода стрелки часов, значит

Момент силы относительно оси равен нулю, если сила и ось лежат в одной плоскости: а) сила пересекает ось (в этом случае l = 0);

б) сила параллельна оси (  );
);
в) сила действует вдоль оси (l=0 и ).
Пространственная система произвольно расположенных сил.
Условие равновесия
Ранее подробно изложен процесс приведения сил к точке и доказано, что любая плоская система сил приводится к силе – главному вектору и паре, момент которой называется главным моментом, причем эквивалентные данной системе сил сила и пара действуют в той же плоскости, что и заданная система. Значит, если главный момент изобразить в виде вектора, то главный вектор и главный момент плоской системы сил всегда перпендикулярны друг другу.
Рассуждая аналогично, можно последовательно привести к точке силы пространственной системы. Но теперь главный вектор есть замыкающий вектор пространственного (а не плоского) силового многоугольника; главный момент уже нельзя получить алгебраическим сложением моментов данных сил относительно точки приведения. При приведении к точке пространственной системы сил, присоединенные пары действуют в различных плоскостях и их моменты целесообразно представлять в виде векторов и складывать геометрически. Поэтому полученные в результате приведения пространственной системы сил главный вектор (геометрическая сумма сил системы) и главный момент (геометрическая сумма моментов сил относительно точки приведения), вообще говоря, не перпендикулярны друг другу.
Векторные равенства  и
и  выражают необходимое и достаточное условие равновесия пространственной системы произвольно расположенных сил.
выражают необходимое и достаточное условие равновесия пространственной системы произвольно расположенных сил.
Если главный вектор равен нулю, то его проекции на три взаимно перпендикулярные оси также равны нулю. Если главный момент равен нулю, то равны нулю и три его составляющие на те же оси.

Значит, произвольная пространственная система сил статически определима лишь в том случае, когда число неизвестных не превышает шести.
Среди задач статики часто встречаются такие, в которых на тело действует пространственная система параллельных друг другу сил.


В пространственной системе параллельных сил неизвестных должно быть не больше трех, иначе задача становится статически неопределимой.
Глава 6. Кинематика точки
Основные понятия кинематики
Раздел механики, занимающийся изучением движения материальных тел без учета их масс и действующих на них сил, называется кинематикой.
Движение – основная форма существования всего материального мира, покой и равновесие – частные случаи.
Всякое движение, и механическое в том числе, происходит в пространстве и во времени.
Все тела состоят из материальных точек. Чтобы получить правильное представление о движении тел, начинать изучение нужно с движения точки. Перемещение точки в пространстве выражается в метрах, а также в дольных (см, мм) или кратных (км) единицах длины, время – в секундах. В практике или жизненных ситуациях время часто выражают в минутах или часах. Отсчет времени при рассмотрении того или иного движения точки ведут от определенного, заранее обусловленного начального момента (t = 0).
Геометрическое место положений движущейся точки в рассматриваемой системе отсчета называется траекторией. По виду траектории движение точки делится на прямолинейное и криволинейное. Траектория точки может быть определена и задана заранее. Так, например, траектории искусственных спутников Земли и межпланетных станций вычисляют заранее, или если принять движущиеся по городу автобусы за материальные точки, то их траектории (маршруты) также известны. В подобных случаях положение точки в каждый момент времени определяется расстоянием (дуговой координатой) S, т.е. длиной участка траектории, отсчитанной от некоторой ее неподвижной точки, принятой за начало отсчета. Отсчет расстояний от начала траектории можно вести в обе стороны, поэтому отсчет в одну какую-либо сторону условно принимают за положительный, а в
противоположную – за отрицательный,т.е. расстояние S – величина алгебраическая. Она может быть положительной (S > 0) или отрицательной (S
Источник



