Как устроен и работает электровоз, тяговый подвижной состав
Наши дополнительныесервисы и сайты:
e-mail:
office@matrixplus.ru tender@matrixplus.ru
icq:
613603564
skype:
matrixplus2012
телефон
+79173107414 +79173107418
г. С аратов
Статистика
Независимое возбуждение тяговых двигателей
В главе 3 было отмечено, что мягкой характеристикой обладают коллекторные двигатели постоянного тока с последовательным возбуждением. Поэтому их в подавляющем большинстве случаев используют на электровозах постоянного и переменного тока. Однако локомотивы с такими двигателями, в особенности электровозы постоянного тока, как уже было отмечено, склонны к бок-сованию. Боксование возникает чаще всего, когда все шесть или восемь тяговых двигателей соединены последовательно. Объясняется это следующим.
В процессе движения электровоза с составом не исключена возможность того, что по каким-либо причинам уменьшится нагрузка на колесную пару или колеса будут катиться по загрязненной поверхности рельсов. В обоих случаях сила сцепления колес с рельсами уменьшится. Вследствие мягкой характеристики тягового двигателя даже небольшое проскальзывание колесной пары вызовет незначительное снижение силы тяги и интенсивное увеличение частоты ее вращения (см. рис. 11, б). Это в свою очередь значительно снижает коэффициент трения колеса о рельс и тяговые двигатели вместе с колесной парой переходят в режим разносного боксования. В таком режиме частота вращения двигателя может превысить максимальную, гарантированную заводом, что может привести к возникновению кругового огня на коллекторе, нарушению геометрической формы коллектора, разрыву бандажей якоря и износу колес и рельсов.
Одновременно ухудшаются условия работы остальных тяговых двигателей, электрически связанных с двигателем боксующей колесной пары. Как уже отмечалось, при последовательном соединении двигателей, например, восьми-осного электровоза с выключенным пусковым реостатом на каждый двигатель приходится ‘/8 напряжения контактной сети, или 375 В. Возникшее боксование нарушит равномерное распределение напряжения. Допустим, что частота вращения якоря возросла в 2 раза; соответственно примерно в 2 раза возрастет э. д. с. боксующего двигателя и напряжение, приходящееся на него, станет равным примерно 750 В, а на остальных семи понизится до 320 В. Кроме того, снизится ток в цепи всех тяговых двигателей. В результате снижения напряжения у семи двигателей и тока в цепи всех двигателей уменьшится скорость движения поезда и сила тяги электровоза, т. е. нарушится нормальный процесс движения.
При восстановлении прежних условий сцепления (увеличится нагрузка на колесную пару, электровоз минует загрязненный участок рельсов) может не прекратиться начавшееся боксование, так как мал коэффициент трения при развившейся большой скорости у оси с боксующим двигателем. Чтобы прекратить боксование, машинист должен применить песок или уменьшить силу тяги электровоза, например, сняв ослабление возбуждения двигателя либо включив секции пускового реостата. Эти действия связаны с потерями силы тяги, скорости, дополнительным расходом электроэнергии и задержкой поезда. Происходящее при последовательном соединении тяговых двигателей перераспределение напряжений приводит к работе боксующего двигателя на более высокой характеристике. (Вспомним, что частота вращения двигателя прямо пропорциональна подводимому напряжению (см. с. 29) Это приводит к снижению вероятности восстановления сцепления без участия машиниста.
Значительно увеличивается вероятность автоматического восстановления сцепления после его срыва, если тяговый двигатель имеет жесткую характеристику (см. рис. 11, а). В этом случае даже небольшое увеличение частоты вращения якоря двигателя у колесной пары, начавшей боксовать, вызывает резкое снижение силы тяги, и скорость проскальзывания колес возрастает незначительно. Как только восстановятся нарушенные по каким-либо причинам условия сцепления, боксование колесной пары прекратится без вмешательства машиниста. Жестким характеристикам свойственно еще одно немаловажное преимущество. Уже отмечалось, что электровоз имеет семейство тяговых характеристик (так, для электровоза ВЛ10 их число равно 15, см. рис. 42). При независимом возбуждении можно получить большее число их в пределах, допустимых по сцеплению, току и скорости движения, плавно изменяя ток возбуждения с помощью полупроводниковых преобразователей. Примерно то же можно обеспечить при смешанном возбуждении двигателей (последовательное и независимое), изменяя соотношение токов, независимого и последовательного возбуждения.
На электровозах постоянного тока возникают затруднения с применением независимого возбуждения. Это связано со сложностью структуры полупроводниковых преобразователей, так как для независимого питания обмоток возбуждения тяговых двигателей необходимо сначала преобразовать постоянный ток в переменный, затем понизить напряжение, выпрямить его и регулировать напряжение с помощью тиристоров.
Кроме того, при резком изменении напряжения в контактной сети (это возможно в эксплуатации) могут возникнуть большие броски тока в обмотках возбуждения и якоря, а значит, и резкие изменения силы тяги со всеми вытекающими отсюда последствиями. Для ограничения бросков тока необходимо устанавливать специальные устройства.
Более благоприятны условия для использования преимуществ независимого возбуждения на электровозах переменного тока. Независимое возбуждение тяговых двигателей в режимах электрического торможения как реостатного, так и рекуперативного применено на электровозах ВЛ80Т, ВЛ80С, ВЛ80Р (см. рис. 67). В режиме тяги резкие колебания напряжения в контактной сети переменного тока в достаточной степени сглаживаются индуктивностью обмоток тяговых трансформаторов, реакторов и дросселей, поэтому дополнительных сглаживающих устройств не требуется.
Тяговые двигатели переменного тока всегда соединены параллельно, и поэтому исключаются неприятности, вызываемые боксованием одной или тем более нескольких колесных пар, обусловленные их последовательным соединением. Однако и при параллельно соединенных тяговых двигателях может возникнуть боксование какой-либо колесной пары. В этом случае ток соответствующего двигателя уменьшается, так как возрастает э. д. с. в обмотке якоря. В связи с этим повышается напряжение на выпрямительной установке и на всех остальных тяговых двигателях, ток их несколько возрастает, а следовательно, возрастает и сила тяги. В результате компенсируется потеря силы тяги колесной пары, у которой нарушено сцепление.
В случае независимого возбуждения уменьшается скольжение боксующей пары (по сравнению со скольжением при последовательном возбуждении), т. е. меньше потеря силы тяги, более интенсивно увеличивается напряжение, а следовательно, ток и сила тяги небоксующих колесных пар. Благодаря этому общая сила тяги электровоза снижается значительно меньше, чем при последовательном возбуждении двигателей.
Однако недостатки жестких характеристик весьма существенны. Не устранив их или хотя бы не смягчив, нецелесообразно применять тяговые двигатели с жесткими характеристиками на электроподвижном составе. Основной недостаток — плохое распределение нагрузок между параллельно работающими двигателями. Опыт эксплуатации специально переоборудованных электровозов ВЛ60К показал, что для максимального использования мощности тяговых двигателей следует сочетать оба способа возбуждения: последовательное при относительно небольших нагрузках, используя положительные свойства мягкой характеристики, и независимое при реализации силы тяги, близкой к ограничению по сцеплению.
форсунок в ультразвуковых ваннах и на стендах
Дезинфицирующие средства
широкого применения для дезинфекции на объектах железнодорожного транспорта, пищевой промышленности, ЛПУ, ветеринарного надзора
Моющие средства
для железнодорожного транспорта, сертифицированные ВНИИЖТ- «Фаворит К» и «Фаворит Щ», внутренняя и наружная замывка вагонов.
Источник
Схемы включения тяговых электродвигателей с различными способами возбуждения
Страницы работы
Содержание работы
2.2 Схемы включения тяговых электродвигателей с различными способами возбуждения
Способ возбуждения (создания рабочего магнитного потока) тяговые электродвигатели подразделяются на электродвигатели последовательного (рисунок 2.4, а), параллельного (рисунок 2.4, б), смешанного (рисунок 2.4, в) и независимого возбуждения (рисунок 2.4, г).
В схеме последовательного возбуждения обмотка якоря и обмотки главных полюсов (обмотки возбуждения) соединяются между собой последовательно, в схеме параллельного возбуждения – параллельно, в схеме смешанного возбуждения – последовательно-параллельно, в схеме независимого возбуждения обмотка возбуждения питается от независимого источника электрической энергии (возбудителя).
Каждая система возбуждения имеет свои преимущества и недостатки. По таким показателям, как равномерность распределения нагрузки между тяговыми электродвигателями локомотива, меньшее изменение нагрузки при колебаниях напряжения в контактной сети, меньшее изменение мощности при движении по различным элементам профиля пути и надежность конструкции, преимущества имеют тяговые электродвигатели последовательного возбуждения, они и получили наибольшее распространение.
Рисунок 2.4 – Схемы включения тяговых электродвигателей с различными способами возбуждения
Источник
Способы возбуждения двигателя постоянного тока.
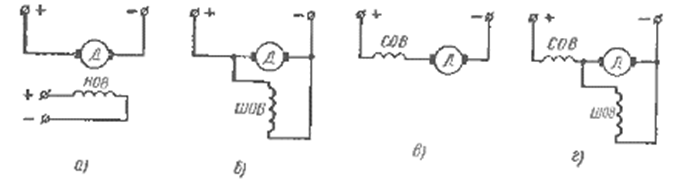
Под возбуждением электрических машин понимают создание в них магнитного поля, необходимого для работы электродвигателя. Схемы возбуждения электродвигателей постоянного тока показаны на рисунке.
Схемы возбуждения электродвигателей постоянного тока: а — независимое, б — параллельное, в — последовательное, г — смешанное
По способу возбуждения электрические двигатели постоянного тока делят на четыре группы:
1. С независимым возбуждением, у которых обмотка возбуждения НОВ питается от постороннего источника постоянного тока.
2. С параллельным возбуждением (шунтовые), у которых обмотка возбуждения ШОВ включается параллельно источнику питания обмотки якоря.
3. С последовательным возбуждением (сериесные), у которых обмотка возбуждения СОВ включена последовательно с якорной обмоткой.
4. Двигатели со смешаным возбуждением (компаундные), у которых имеется последовательная СОВ и параллельная ШОВ обмотки возбуждения.
Порядок установки переносных заземлений в электроустановках до 1000 В.
4,5 1, Устанавливать заземления на токоведущие части необходимо непосредственно после проверки отсутствия напряжения.
4.5.2. Переносные заземления сначала нужно присоединить к заземляющему устройству,а затем, после проверки отсутствия напряжения, установить на токоведущие части.Снимать переносное заземление необходимо в обратной последовательности:сначала снять его с токоведущих частей, а затем от заземляющего устройства.
4.5.3. Установка и снятие переносных заземлений должны выполняться в диэлектрических перчатках с применением в электроустановках выше 1000 В изолирующей штанги. Закреплять зажимы переносных заземлений следует этой же штангой или непосредственно руками в диэлектрических перчатках.
4.5.4. Запрещается пользоваться для заземления проводниками, не предназначенными для этой Дели, а также присоединять заземления посредством скрутки.
БИЛЕТ № 18
Закон Ома для полной цепи
Закон Ома для полной цепи – эмпирический (полученный из эксперимента) закон, который устанавливает связь между силой тока, электродвижущей силой (ЭДС) и внешним и внутренним сопротивлением в цепи.
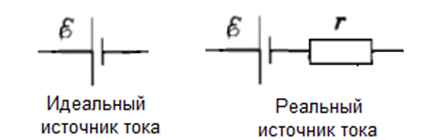
При проведении реальных исследований электрических характеристик цепей с постоянным током необходимо учитывать сопротивление самого источника тока. Таким образом в физике осуществляется переход от идеального источника тока к реальному источнику тока, у которого есть свое сопротивление (см. рис. 1).
Рис. 1. Изображение идеального и реального источников тока
Рассмотрение источника тока с собственным сопротивлением обязывает использовать закон Ома для полной цепи.
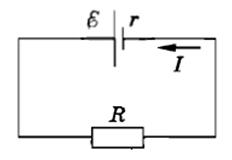
Сформулируем закона Ома для полной цепи так (см. рис. 2): сила тока в полной цепи прямо пропорциональна ЭДС и обратно пропорциональна полному сопротивлению цепи, где под полным сопротивлением понимается сумма внешних и внутренних сопротивлений.
Рис. 2. Схема закона Ома для полной цепи.
Дата добавления: 2018-08-06 ; просмотров: 1723 ; Мы поможем в написании вашей работы!