
- Векторное управление
- Классификация методов векторного управления
- Полеориентированное управление (ПОУ, FOC )
- Прямое управление моментом с пространственно-векторной модуляцией напряжения
- Нелинейные регуляторы момента
- Прямое управление моментом
- Прямое самоуправление моментом
- Заключение
- Основные сведения. «Способы управления электроприводами
Векторное управление
Правильно выбранный способ управления электроприводами переменного тока значительно снижает потребление электроэнергии, повышает к.п.д. и дает ощутимый технический и экономический эффект.
Синхронные и асинхронные машины управляются по 2 основным законам: скалярным и векторным. Суть последнего способа – контроль амплитуды и частоты питающего напряжения как при скалярном управлении, а также фазы. То есть, регулируется не только скалярная величина контролируемых характеристик, но и их векторная составляющая.
Векторный способ позволяет изменять скорость вала и момент одновременно, значительно увеличивает точность регулирования во всем диапазоне, уменьшает потери на намагничивание и нагрев, обеспечивает плавное вращения ротора без рывков на небольших скоростях. Метод также позволяет подстраивать момент на валу при переменной нагрузке без изменения частоты вращения.
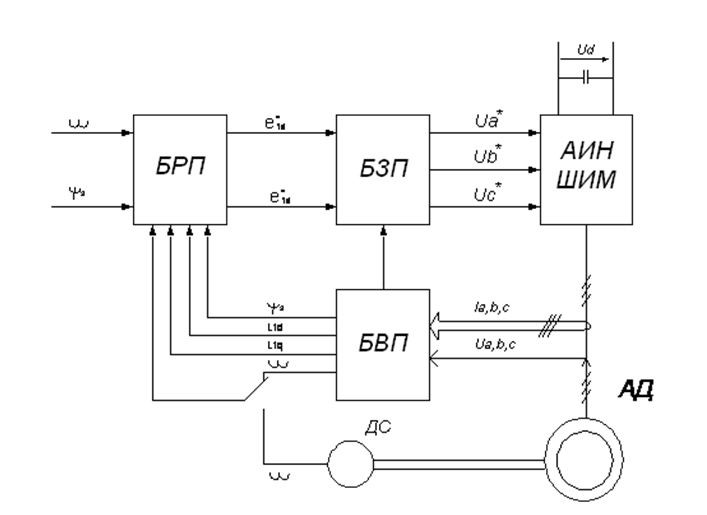
На схеме представлена типовая схема векторного управления электроприводом, где:
- АД – электрический двигатель.
- БРП – блок регуляторов суммирования входных сигналов и сигналов обратной связи.
- БВП – блок вычисления и преобразования импульсов обратной связи.
- БЗП – задающий блок.
- ДС – датчик скорости вала электродвигателя.
- АИН ШИМ – блок амплитудно-импульсной или широтно-импульсной модуляции частоты питающего напряжения.
Принцип ее работы основан на контроле сцепления магнитных потоков ротора и статора. На блок регуляторов БРП и поступают заданные сигналы момента и потокосцепления и импульсы с контура обратной связи. Далее в задающем блоке БЗП они преобразуются в импульсы, регулирующие работу ШИМ или АИМ. На обмотки электродвигателя поступает напряжение заданной частоты и величины. Датчик скорости ДС считает количество оборотов вала ротора в единицу времени и подает сигнал на блок регуляторов БРП. В нем осуществляется суммирование фазовых составляющих заданных сигналов и импульсов обратной связи. В результате на задающий блок БЗП поступает интегрированный сигнал с учетом фактической скорости и момента на валу электродвигателя.
Классификация методов векторного управления
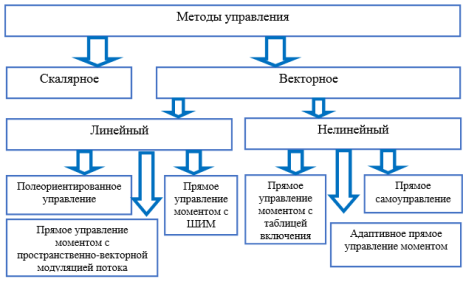
Со времен появления первых управляемых электроприводов переменного тока было предложено много способов регулирования скорости ротора и момента на валу. Наиболее массовое применение нашли методы линейного и нелинейного регулирования.
Первый способ применяют в схемах с широтно-имульсной модуляцией. При этом вектор напряжения обмоток статора определяется как усредненное значение за период дискретизации. При линейном регулировании используется пространственно векторная модуляция, регулятор (ПИ) работает с усредненными величинами за период дискретизации сигналов, в то время как нелинейный метод подразумевает обработку мгновенных величин сигналов.
К линейному способу регулирования относятся:
- Полеориентированное управление или ПОУ (англ. FOC ).
- Прямое управление моментом с пространственно-векторной модуляцией напряжения или ПУМ-ПВМ (англ. DTC-SVM ).
- Прямое управление моментом с пространственно векторной модуляцией потока или ПУМ-ПВМП (англ. DTC-FVM).
Обработка средних значений позволяет снизать частоту выборки в линейных схемах до 2-5 кГц. При применении нелинейного метода эта величина составляет до 40 кГц. К таким способам относят:
- Прямое управление моментом с таблицей включения или ПУМ.
- Прямое самоуправление ПСУ.
- Адаптивное прямое управление моментом.
Нелинейное управление позволяет упростить схему, не требует установки датчика положения. Такой способ также отличает отсутствие необходимости выполнять преобразование Парка, отдельную модуляцию напряжения, вводить в топологию контуры тока. Приводы с нелинейным управлением обладают отличными динамическими характеристиками.
К недостаткам метода относят наличие широкоспекторных шумов, значительных пульсаций момента и тока, обусловленных переменной частотой переключения ключей, высокие требования к точности определения вектора магнитного потокосцепления статора и момента.
Полеориентированное управление (ПОУ, FOC )
Полеориентированное управление – метод раздельного контроля магнитного поля и момента. Такой способ применяют в схемах привода с асинхронными двигателями с короткозамкнутым ротором (АДКР) и синхронными электрическими машинами на постоянных магнатах (СДПМ). Метод аналогичен управлению электродвигателями постоянного тока с независимым возбуждением и механической коммутацией.
Главная особенность таких машин – разделенные обмотки возбуждения и якоря. Потокосцепление регулируется током возбуждения статора, изменение момента осуществляется регулировкой тока вращающейся части.
Бесщеточные электрические машины с короткозамкнутым ротором и постоянными магнитами имеют 3-фазные обмотки неподвижной части, потокосцепление и момент зависят от величины и фазы тока статора. Токи возбуждения и ротора объединены. Таким образом, их величины и фазы нельзя изменять независимо друг от друга.
Ток в таких двигателях можно разложить на 2 составляющие: продольную Isd и поперечную Isq. От амплитуды и фазы Isd зависит поле, от значений Isq зависит момент на валу.
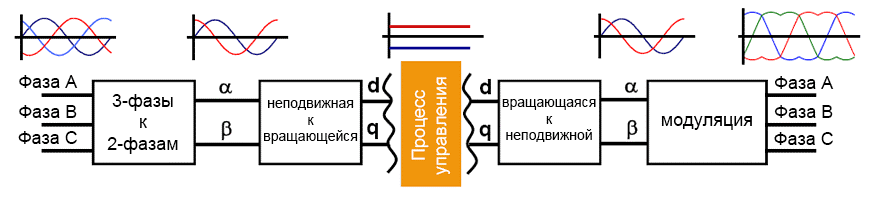
В такой системе управление двигателем переменного тока аналогично управлению электрической машиной с независимым возбуждением. Регулирование может быть осуществлено инвертором с широтно-импульсным модулятором, пропорционально-интегральным регулятором и пространственно-векторной модуляцией напряжения.
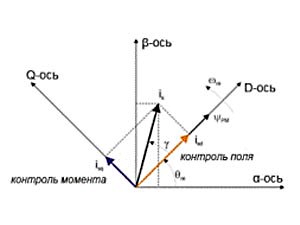
При этом мгновенные значения тока неподвижной части преобразовываются при помощи преобразования Парка для адаптации к системе координат вращения ротора с учетом сигналов датчика положения вращающейся части. Поле изменяется путем регулирования продольной компоненты Isd, момент – регулировкой поперечной составляющей Isq.
Для определения векторов опорных напряжений в схеме применяется вычислительный блок, осуществляющий обратное преобразование Парка.
Для получения данных о положении вала используется датчик, интегрированный в двигатель. Также возможно полеориентированное управление по косвенным данным. В этом случае положение ротора вычисляется на основании сигналов со счетчика оборотов или измерений других параметров.
Прямое управление моментом с пространственно-векторной модуляцией напряжения
Общая схема прямого управления с ПВМН (пространственно-векторной модуляцией напряжения) представлены на рисунке.
![]()
Схемы реализованы по подчиненному принципу, то есть внешний контур регулирует момент, внутренний – потокосцепление статора. Вектор управляющего напряжения uz формируется через векторы потокосцепления ψ и момента М, то есть, он состоит из опорных составляющих напряжения статора.
С выхода регулятора момента подается команда на изменения угла положения ротора, частоты его вращения. В таких схемах момент и потокосцепление регулируются в замкнутых контурах напрямую, что предполагает точное определение пространственных величин потока и момента. Схема с пространственно-векторной модуляцией напряжения работает на постоянной частоте переключений. Это позволяет осуществлять пуск двигателя на низкой скорости, снижает пульсации потока и момента. К недостаткам относятся некоторое ухудшение динамических характеристик.
Нелинейные регуляторы момента
Вторая группа методов векторного управления – нелинейные. В отличие от полеориентированного управления, где используется регулирование по аналогии с коллекторными электрическими машинами постоянного тока с независимым возбуждением, нелинейный способ предлагает непрерывное управление по аналогии с полупроводниковыми устройствами и инверторами.
Прямое управление моментом
Схема прямого управления моментом с таблицей включений была разработана в 1984 году. Суть метода – задание вектора напряжения для одновременного регулирования момента и сцепления магнитных потоков.
Реализация такого способа управления значительно проще схем, ориентированных по полю. При этом отпадает необходимость определять положение вала и преобразовывать неподвижную систем координат во вращающуюся и обратно.
Один из вариантов схем прямого управления моментом с таблицей ограничения включений представлен на рисунке.
Управление осуществляется по двум каналам: частоты вращения, потокосцепления.
На входе есть задатчик интенсивности (ЗИ), который обеспечивает ограничение ускорения при изменении скорости. Это необходимо для снижения тока на инверторе напряжения (АИН). При ускорении ограничитель ЗИ уменьшает значение тока инвертора АИН. При снижении частоты вращения – рассеивание избыточной мощности или ее возврат в сеть. Как и в системе с пространственной модуляцией для уменьшения перерегулирования на выходе ЗИ нужен апериодический фильтр (Ф). Пропорционально-интегральный регулятор скорости (РС) дает команду на задание момента, который ограничивается нелинейным звеном насыщения.
Определение потокосцеплений статора и ротора осуществляется в блоке НП (адаптивный наблюдатель). В него поступают сигналы о текущих значениях токов и напряжении статора, которые преобразуются в проекции.
Идентификатор напряжения (ИН) служит для определения фазы напряжения статора по состоянию ключей инвертора и его выходному напряжению. На основании полученных пространственные значений вычисляются координаты векторов, а также величины момента и скорости вращения.
Сигналы задания момента и потокосцепления сравниваются с фактическими текущими значениями. Регуляторы РМ и РП с непрерывными характеристиками определяют величину ошибки и формируют сигнал, поступающий на селективный блок вектора напряжения (СВН), с которого управляются ключи инвертора.
Схема прямого управления моментом с таблицей отключений обеспечивает динамическое изменение момента на малых скоростях, включая нулевую угловую частоту, допустимое отклонение скорости не более 10% без датчика и около 0,01% с датчиком, скорость отработки задания момента не более 2 мс.
Прямое самоуправление моментом
Метод самоуправления отличают хорошие динамические характеристики во всех значениях вектора магнитного поля, относительно невысокая частота переключения ключей инвертора, несинусоидальная форма потокосцепления и тока обмотки неподвижной части двигателя, шестиугольная траектория движения вектора потокосцепления.
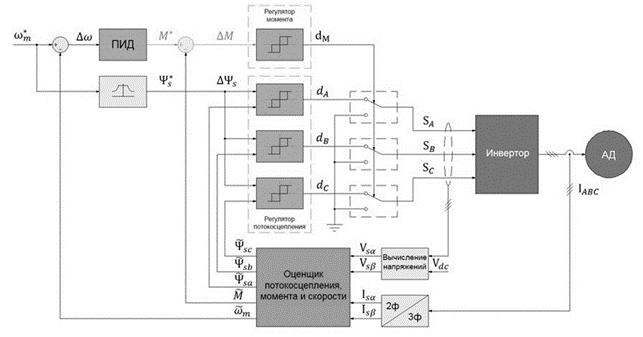
Регулятор потокосцепления выдает сигналы dA, dB и dC на основании заданного значения потокосцепления статора ψs и текущих фазовых компонентов ψsA, ψsB и ψsC. Сигналы с регулятора соответствуют напряжениям, подаваемым на инвертор.
Сигнал с регулятора момента dM определяет нулевое состояние напряжения, регулятор потокосцепления – длительность активных состояний.
| Метод управления | Диапазон управления скоростью | Время нарастания момента | Пусковой момент | Стоимость | Погрешность регулирования скорости | Описание |
| Скалярный | 1:10 | Не регулируется | Невысокий | Небольшая | От 5 до 10% | Прост в исполнении, имеет узкий интервал регулирования скорости, значительное время отклика |
| Векторное полеорентированное | Более 1: 400 | 1-2 мс | Высокий | Высокая | 0 | Позволяет плавно регулировать момент и частоту вращения вала. Необходимо определение положения ротора |
| Векторное с пространственно-векторной модуляцией напряжения; | Более 1: 400 | 1-2 мс | Высокий | Высокая | 0 | Сочетает достоинства полеориентированного и прямого управления |
| Прямое с таблицей выключения | Более 1: 400 | Менее 1 мс | Высокий | Высокая | 0 | Обладает отличными динамическими параметрами. Недостаток: значительные пульсации момента и тока |
| Прямое самоуправление | Более 1: 400 | 1-2 мс | Высокий | Высокая | 0 | Снижает потери при управлении приводом значительной мощности |
Заключение
Каждый метод управления электроприводом переменного тока имеет свои достоинства и недостатки. Способ выбирают, исходя из технических требований к оборудованию, а также экономических критериев.
Источник
Основные сведения. «Способы управления электроприводами




![]()
![]()
Лекция № 5
«Способы управления электроприводами. Схемы ручного управления электроприводами.
Контакторные, контроллерные и командно-контроллерные схемы управления»
Системы управления судовыми электроприводами
Основные сведения
Под управлением электроприводом понимают выполнение операций, осуществляю-
щих пуск, регулирование скорости, торможение, реверсирование и остановку двигателя, а также его защиту, производимых в целях поддержания или соответствующего изменения режима работы привода.
Под системой управления электроприводом понимают электротехническое устрой
ство, предназначенное для выполнения перечисленных выше операций и изготовленное чаще всего в виде металлического шкафа с аппаратурой управления ( контакторами, реле, защитными устройствами, элементами автоматики и т.п. ).
В зависимости от уровня автоматизации, т.е. от степени участия человека в процес-
се управления, различают три вида систем управления:
1. неавтоматизированного ( ручного) управления ( сокращенного названия нет );
2. автоматизированного управления ( САУ ) ;
3. автоматического управления ( АСУ ).
Неавтоматизированное (ручное) управление осуществляют непосредственным
воздействием оператора на аппарат ручного управления: пусковой или пускорегулировоч
ный реостат, выключатель или контроллер.
В системах автоматического управления (АСУ) управление объектом осущестля
ется без участия человека, пример – авторулевой.
В системах автоматизированного управления (САУ) человек ( группа людей ) яв-
ляется самостоятельным звеном управления в составе системы управления, пример – си-
стема управления судовой атомной энергетической установкой.
1.3. Системы релейно-контакторного управления
Для управления ЭП применяют следующие системы управления: контроллерные, контакторные и системы Г-Д.
Контроллерные системы управления применяют преимущественно в ЭП мощностью до 20 кВт (в отдельных случаях и большей мощности). Управление ЭП при данной системе осуществляется силовым кулачковым контроллером серии КВ, контакты которого включены в силовую цепь ЭД. Контроллеры устанавливают на палубе вблизи механизма, а ящики с пускорегулировочными резисторами-под палубой. Для предотвращения обгорания контактов контроллера в схему обычно вводят линейный контактор, обеспечивающий коммутационную нагрузку при включении ЭД. Линейный контактор также выполняет функцию нулевой защиты, с его помощью также осуществляется защита ЭП от перегрузок. Высокая надежность и простота обслуживания этих аппаратов дают им преимущество перед другими системами.
Применение контроллерных систем при мощности ЭП выше 20-25 кВт не рекомендуется, их заменяют контакторными системами, которые наиболее широко распространены на современных судах. Эти системы обеспечивают автоматизацию процесса пуска, регулирования режимов и необходимую защиту ЭД. Для управления используют комплектные устройства в виде контакторных станций, называемых магнитными контроллерами. Магнитные контроллеры применяют как в ЭП постоянного тока (серий БП и ВП-брызго-и водозащищенного исполнения), так и в ЭП переменного тока (серии БТ и ВТ-брызго- и водозащищенного исполнения). Автоматизация отдельных режимов (пуск, торможение) выполняется, как правило, в функции времени.
Управление якорно-швартовными ЭП осуществляется при помощи командоконтроллеров, которые устанавливаются вблизи механизмов.
Системы Г-Д имеют ограниченное применение. В свое время их использование было оправдано для больших мощностей якорных ЭП, где устройства интенсивно использовались и по технологии выполняемых работ требовали большего предела и плавности регулирования. Системы Г-Д выполняют с противокомпаундной обмоткой генератора, чем обеспечиваются смягчение механических характеристик, защита от перегрузки по току и ограничение мощности, потребляемой из сети.
Целесообразным также следует считать замену электромашинного преобразователя тиристорным, что осуществляется на некоторых судах.
При всех системах управления ЭД якорно-швартовных механизмов по требованию Регистра должны обеспечиваться системами защиты от токов короткого замыкания и перегрузок, а также нулевой защитой, которые устанавливают на распределительных щитах питания и в магнитных контроллерах. Системы защиты могут вызывать отключение ЭП, ограничение нагрузочного режима или подачу предупреждающего сигнала

Защиту от перегрузки в отечественных ЭП с асинхронными двигателями типа МАП выполняют в некоторых случаях с помощью тепловых токовых реле серии ТРТ, но за последние годы более широкое применение получили температурные средства защиты; биметаллические термореле, встроенные непосредственно в лобовые части обмоток статора, и термореле с использованием полупроводниковых терморезисторов.
Защита от коротких замыканий осуществляется автоматическими выключателями.
Нулевая блокировка, выполненная посредством электромагнитных реле, позволяет восстановить работоспособность схемы только после постановки командоаппарата в нулевое положение, что обеспечивает безопасность ведения якорных и швартовных операций.
Кроме указанных защит, якорно-швартовные ЭП снабжаются ручными выключателями безопасности, которые устанавливаются на командоконтроллере и отключают ЭД при поломке механизма или возникновении ситуаций, опасных для обслуживающего персонала.
Источник



