
- Методы управления двигателем постоянного тока в САУ
- Способы управления электродвигателями
- Управление коллекторными электродвигателями постоянного тока
- Управление универсальными двигателями
- Управление бесщеточными электродвигателями переменного тока
- Устройства управления электродвигателями
- Способы управления электродвигателями
Методы управления двигателем постоянного тока в САУ
Управление двигателем постоянного тока в САУ подразумевает либо изменение скорости вращения пропорционально некоторому сигналу управления, либо поддержание этой скорости неизменной при воздействии внешних дестабилизирующих факторов.
Используются 4 основные метода управления, реализующие перечисление выше принципы:
управление по системе «генератор-двигатель» (Г-Д);
управление по системе «управляемый выпрямитель –Д» (УВ-Д);
Подробное исследование этих способов – предмет ТАУ и курса «Основы электропривода». Мы рассмотрим только основные положения, имеющие непосредственное отношение к электромеханике.

Обычно используются 3 схемы:
при регулировке скорости n от 0 до nном в цепь якоря включают реостат (якорное управление);
при необходимости получить n > nном реостат включают в цепь ОВ (полюсное управление);
для регулирования скорости n nном реостаты включают как в цепь якоря, так и в цепь ОВ.
Перечисленные схемы применяются при ручном управлении. Для автоматического управления используют ступенчатое переключение R ра и R рв с помощью контакторов (реле, электронных коммутаторов).
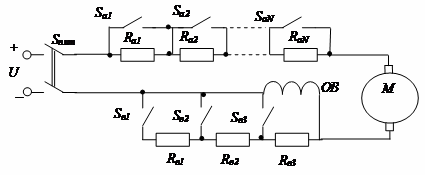
Если требуется точное и плавное регулирование скорости, число коммутируемых резисторов и элементов коммутации должно быть большим, из-за чего увеличиваются габариты системы, стоимость и снижается надежность.
Управление по системе Г-Д
Регулирование частоты вращения от 0 до по схеме рис. производится регулировкой R в (U гизменяется от 0 до n ном). Для получения скорости двигателя больше nном — изменением R вд (уменьшение тока ОВ двигателя уменьшает его основной поток Ф, что и приводит к увеличению скорости n).
Переключатель S1 предназначен для реверса двигателя (изменения направления вращения его ротора).
Поскольку управление Д осуществляется путем регулирования сравнительно малых токов возбуждения Г и Д, оно легко адаптируется к задачам САУ.
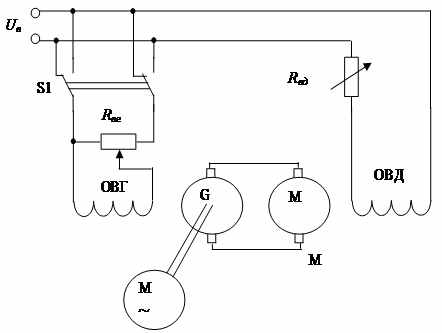
Недостаток такой схемы – большие габариты системы, масса, низкий КПД, поскольку здесь имеется трехкратное преобразование преобразование энергии (электрической в механическую и обратно, и на каждом этапе имеются потери энергии).
Управление по системе «управляемый выпрямитель – двигатель»
Система «управляемый выпрямитель – двигатель» (см. рисунок) похожа на предыдущую, но вместо электромашинного источника регулируемого напряжения, состоящего из, например, трехфазного, двигателя переменного тока и Г=Т, используется управляемый, например, тоже трехфазный тиристорный электронный выпрямитель.
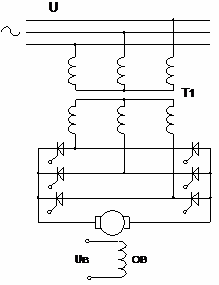
Сигналы управления формируются отдельным блоком управления и обеспечивают требуемый угол открывания тиристоров, пропорциональный сигналу управления Uу.
Достоинства такой системы — высокий КПД, малые габариты и масса.
Недостатком по сравнению с предыдущей схемой (Г-Д) является ухудшение условий коммутации Д из-за пульсаций его тока якоря, особенно при питании от однофазной сети.
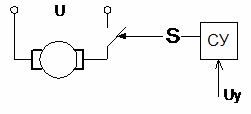
На двигатель с помощью импульсного прерывателя подаются импульсы напряжения, модулированные (ШИМ, ВИМ) в соответствии с управляющим напряжением.
Таким образом, изменение скорости вращения якоря достигается не за счет изменения напряжения управления, а путем изменения времени, в течение которого к двигателю подводится номинальное напряжение. Очевидно, что работа двигателя состоит из чередующихся периодов разгона и торможения (см. рисунок).
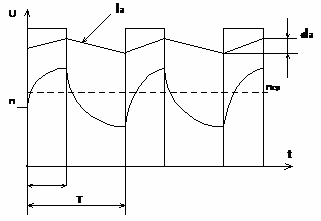
Если эти периоды малы по сравнению с полным временем разгона и остановки якоря, то скорость n не успевает к концу каждого периода достигать установившихся значений nном при разгоне или n = 0 при торможении, и устанавливается некоторая средняя скорость nср, величина которой определяется относительной продолжительностью включения.
Поэтому в САУ требуется схема управления, назначение которой – преобразование постоянного или изменяющегося сигнала управления в последовательность управляющих импульсов с относительной продолжительностью включения, являющейся заданной функцией величины этого сигнала. В качестве элементов коммутации используются силовые полупроводниковые приборы – полевые и биполярные транзисторы, тиристоры.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Способы управления электродвигателями
Управление коллекторными электродвигателями постоянного тока
Из уравнения скорости электродвигателя постоянного тока видно, что частота вращения коллекторного электродвигателя постоянного тока напрямую связана с величиной напряжения питания прикладываемого к двигателю и момента нагрузки.

- где
 — угловая частота, рад/с,
— угловая частота, рад/с, - U — напряжение питания, В,
- – постоянная ЭДС, В∙с/рад,
- M — момент электродвигателя, Н∙м,
- — механическая жесткость двигателя.
 — угловая частота, рад/с,
— угловая частота, рад/с, – постоянная ЭДС, В∙с/рад,
– постоянная ЭДС, В∙с/рад, — механическая жесткость двигателя.
— механическая жесткость двигателя.Таким образом скорость вращения коллекторного двигателя постоянного тока изменяется посредством изменения величины напряжения питания.
Управление универсальными двигателями
Универсальный коллекторный двигатель может быть подключен как к сети постоянного тока, так и к сети переменного тока. Так же как и у коллекторного двигателя постоянного тока, скорость универсального двигателя управляется величиной напряжения питания, а не его частотой.
Управление бесщеточными электродвигателями переменного тока
Электроприводы с электродвигателем переменного тока наиболее часто используются в составе: насосов, вентиляторов, компрессоров, станков и других механизмов, для которых важно поддерживать скорость вращения вала двигателя, либо определенный технологический параметр.
Основным элементом современного электропривода является система управления электродвигателем: частотный преобразователь или сервопривод.
Преобразователь частоты позволяет управлять моментом и скоростью вращения электродвигателя и исполнительного механизма.
Сервопривод позволяет точно управлять угловым положением, скоростью и ускорением исполнительного механизма.
При этом современные высокопроизводительные методы управления двигателями переменного тока используемые в современных частотных преобразователях и в сервоприводах имеют единую концепцию управления — векторное управление.
Источник
Устройства управления электродвигателями
Устройство управления электродвигателем может включать ручные или автоматические средства для запуска и остановки двигателя, средства выбора прямого или обратного направления вращения, выбора и регулирования скорости вращения, регулирования или ограничения момента, защиту от перегрузки и от неисправности.
Каждый электродвигатель должен иметь своего рода систему управления (контроллер). Система управления электродвигателем в зависимости от задачи будет иметь различные характеристики и сложность.
Простейшим случаем управления электродвигателем является выключатель который соединяет электродвигатель с источником энергии, например как в небольших бытовых приборах или электроинструменте (дрели и др.). Переключение может осуществляться вручную, с помощью реле или контактора подсоединенного к датчику для автоматического запуска или остановки электродвигателя. Переключатель может иметь несколько положений для выбора различных способов подключения электродвигателя, что может позволить уменьшить пусковое напряжение, выбирать направление и скорость вращения.
Более сложные системы управления электродвигателями могут использоваться для точного управления скорости и момента электродвигателя, могут быть частью системы для точного управления угловым положением управляемого механизма.
Устройства управления электродвигателями могут управляться вручную, удаленно или автоматически. Они могут иметь, как только функции старта и остановки двигателя, так и многие другие функции.
Устройства управления двигателями можно классифицировать по типам управляемых электродвигателей (таких как СДПМ, КДПТ и др.) или по назначению.
Источник
Способы управления электродвигателями
Управление электродвигателем сводится к пуску, реверсу, остановке, торможению и изменению скорости его вращения.
В зависимости от способа воздействия на пускорегулирующую аппаратуру различают ручное, полуавтоматическое и автоматическое управление электродвигателям.
По роду применяемой аппаратуры управление может быть реостатным, контроллерным, контакторным и по системе генератор-двигатель.
При ручном управлении все операции по изменению состояния электродвигателя осуществляются непосредственным воздействием на пускорегулирующую аппаратуру электродвигателя: рубильники, пакетные выключатели и магнитные пускатели (при прямом пуске), пусковые, регулирующие или пускорегулирующие реостаты и контроллеры.
При электродвигателях значительных мощностей аппаратура ручного управления (реостаты и контроллеры) становится тяжелой и громоздкой, а манипуляции с ней требуют значительных физических усилий, что затрудняет управление.
Ручное управление электродвигателями требует от оператора определенных навыков. При неправильных манипуляциях возможны обесточивание установки из-за срабатывания автомата генератора (вследствие недопустимого толчка пускового тока при слишком быстром пуске), перегрев пусковых сопротивлений (при слишком замедленном пуске), повышенный динамический удар (при резком торможении) и т. п. Поэтому при ручном управлении снижается надежность работы электродвигателей, и в настоящее время оно применяется в основном для электродвигателей небольшой мощности со сравнительно редкими пусками и остановками.
Полуавтоматическое управление электродвигателем осуществляется при помощи релейно-контакторной аппаратуры. Воздействие на эту аппаратуру (для соответствующего замыкания и размыкания цепей питания катушек контакторов и реле) производит оператор при помощи ручных аппаратов: кнопок управления или командоконтроллеров. Весь же процесс изменения состояния электродвигателя происходит автоматически в нужной последовательности и с нужными выдержками времени независимо от оператора.
Для полуавтоматического управления от персонала не требуется высокая квалификация. Для манипуляции с командоконтроллерами и кнопками управления не нужно больших физических усилий; кроме того, эти усилия совершенно не зависят от мощности электродвигателя. При таком способе управления повышается надежность работы электродвигателей, облегчается их блокировка, становится возможным дистанционное управление, а также одновременное управление несколькими электродвигателями из одного места (например, управление двумя грузовыми лебедками одним лебедчиком).
Преимущества полуавтоматического управления обусловили его значительное распространение на судах.
При автоматическом управлении обслуживающий персонал не участвует в управлении электродвигателем. Роль оператора сводится к первоначальной наладке системы и дальнейшему периодическому наблюдению за ее состоянием. Начальные импульсы для пуска или остановки электродвигателя подаются специальными аппаратами, так называемыми датчиками. Такими датчиками могут служить реле, реагирующие на изменение давления, температуры какой-либо среды, уровня жидкости в сосуде или отсеке судна и т. д.
За последние годы автоматическое управление электродвигателями на судах получает все большее распространение. Автоматизируется управление насосами водоснабжения, климатическими установками, компрессорами, холодильными установками, механизмами, обслуживающими работу паровых котлов и т. д.
Автоматическое управление значительно облегчает работу судового персонала, освобождая его от необходимости непрерывно наблюдать за работой механизмов.
3.4. Обслуживание электрических машин постоянного тока При подготовке к пуску электрические машины внимательно осматривают, обращая особое внимание на чистоту коллектора и щеток, а также на состояние внутренних и наружных контактов. Проверяют положение щеток в щеткодержателях и силу нажатия пружин. Обязательно проверяют, есть ли смазка в подшипниках, и в случае необходимости добавляют ее. Затем, проверив положение рукояток регулировочных и пусковых реостатов, проворачивают агрегат вручную на 1—2 оборота, проверяя при этом, нет ли заеданий и посторонних шумов. Убедившись в отсутствии дефектов, пускают агрегат. После пуска агрегата наблюдают за его работой по показаниям контрольно-измерительных приборов и периодически проверяют нагрев отдельных частей, работу коллектора и щеток. При нормальной работе нагрев машины вызывается прохождением тока через обмотки и выделением тепла, трением в подшипниках, трением щеток о коллектор и вращающихся частей о воздух. В инструкциях завода-изготовителя обычно указываются допустимые температуры нагрева отдельных частей машины. Если по обмоткам будет проходить ток большей величины (при перегрузках и коротких замыканиях), то нагрев обмоток возрастает, что может привести к порче изоляции машины. В случае отсутствия или недостаточности смазки в подшипниках они быстро нагреваются и изнашиваются. Ни в коем случае нельзя допускать искрения между щетками и коллектором электрической машины. Искрение может возникнуть, если коллектор загрязнен или неравномерно выработаны его пластины, неплотно прилегают или дрожат щетки, ток, проходящий по обмоткам, превосходит расчетный и т. д. Работе коллектора уделяют самое серьезное внимание. Поэтому, когда машина не работает, загрязненный коллектор очищают тряпочкой, смоченной в бензине или керосине. При этом, если обнаружат царапины на коллекторе, его шлифуют стеклянной шкуркой. Для плотного прилегания щеток к пластинам коллектора щетки притирают стеклянной шкуркой, которую заводят между щетками и коллектором. Если щетки слабо прижимаются к коллекторным пластинам, необходимо отрегулировать нажимные пружины. Изменение режима работы машины производится с помощью соответствующей аппаратуры управления. После остановки электромашин постоянного тока необходимо: осмотреть машину снаружи и внутри; удалить и протереть пыль, грязь и масло со всех доступных частей; измерить изоляцию и ощупать места контактных соединений для определения мест чрезмерного нагревания; устранить неисправности, замеченные во время работы и осмотра машины. 3.5. Принцип действия и устройство электрических машин переменного тока. Синхронные машины переменного тока по устройству немного отличаются от машин постоянного тока. Каждая машина состоит из двух основных частей: неподвижной части, называемой статором, и вращающейся части, называемой ротором. В отличие от машин постоянного тока, у машин переменного тока на статоре укладывают обмотку якоря, а на роторе — обмотку возбуждения. Вместо коллектора на роторе имеются изолированные кольца, по которым ток проводится в обмотку возбуждения. Машины переменного тока бывают синхронные и асинхронные. Синхронными называются такие машины переменного тока, частота вращения которых определяется частотой тока. С изменением частоты тока у таких машин одновременно (синхронно) меняется частота вращения. Как правило, у синхронных машин по обмотке возбуждения проходит постоянный ток от постороннего источника. Синхронные машины обратимы, т. е. могут работать в качестве генераторов и электродвигателей. Конструкция синхронного двигателя почти не отличается от конструкции синхронного генератора. Так как на судах морского флота цепи переменного тока питаются от трехфазных синхронных генераторов, то остановимся на их устройстве и принципе работы. Обмотка якоря трехфазного синхронного генератора располагается в статоре и состоит из трех отдельных обмоток-фаз, сдвинутых относительно друг друга на 120° (1/3 периода) с таким расчетом, чтобы индуктируемая э. д. с. в каждой фазе достигала своего максимума спустя 1/3 периода после максимума э. д. с. соседней фазы. Обмотку возбуждения укладывают на роторе, и источником питания для нее может быть небольшой генератор постоянного тока (возбудитель), смонтированный на одном валу с синхронным генератором, или даже аккумуляторная батарея. Обмотки статора соединяются между собой звездой или треугольником, при этом во внешнюю цепь от обмотки статора отходят три провода (три контакта). На рис. 11 даны схема и продольный разрез синхронного генератора трехфазного переменного тока с возбудителем. Ротор состоит из сердечников полюсов 1, катушки обмотки возбуждения 2, питаемой постоянным током через контактные кольца 5. Статор состоит из активной стали якоря 3, служащей магнитопроводом, и станины 6, служащей для крепления стали якоря и установки машины на фундамент. Активная сталь якоря набирается из листов специальной стали толщиной 0,5 или 0,35 мм. Листы изолируются с обеих сторон специальным лаком. Обмотка 4 укладывается в пазах, выштампованных в стали статора. На рис. 12, а показано размещение трехфазной обмотки статора (на одной четвертой его части), а на схемах б и в — соединение обмотки статора в треугольник и в звезду. При соединении в треугольник начало первой фазы I соединяется с концомII, начало II — с концомIII и, наконец, начало III — с концом I. При соединении обмоток статора звездой концы всех фаз соединяются в одну точку, называемую нулевой, а начала всех фаз остаются свободными, и к ним присоединяется внешняя цепь, в которую подается вырабатываемая генератором электрическая энергия. Рис. 12 Соединение обмоток трехфазного генератора Синхронные трехфазные генераторы являются в настоящее время основными источниками электрической энергии как на береговых, так и на судовых электрических станциях любой мощности. В настоящее время на морских судах получили широкое распространение синхронные генераторы, у которых обмотка возбуждения питается током статора, предварительно выпрямленным с помощью выпрямителей. Схема возбуждения этих машин обеспечивает такое ‘изменение тока возбуждения, при котором напряжение на выводах генератора ‘поддерживается практически постоянным. Такие генераторы называются синхронными генераторами с самовозбуждением и саморегулированием -напряжения. Конструкция синхронного двигателя принципиально не отличается от конструкции синхронного генератора. Для того чтобы синхронный генератор заставить работать в режиме двигателя, нужно отключить первичный двигатель и к обмоткам фаз статора подвести трехфазный ток из цепи. В этом случае генератор станет синхронным электродвигателем, потребляющим ток. Проходя по обмоткам фаз, переменный трехфазный ток создает вращающееся магнитное поле, которое, взаимодействуя с электромагнитом ротора, увлекает его в сторону своего вращения. В результате ротор будет вращаться с такой же частотой, как и вращающееся магнитное поле, при этом он не остановится, даже если дать ему нагрузку, соединив с каким-нибудь механизмом. В этом и заключается сущность работы синхронного электродвигателя. Регулирование частоты вращения ротора синхронного двигателя производится изменением частоты тока цепи, а изменение направления вращения ротора — переключением двух любых фаз, т. е. взаимным пересоединением двух питающих проводов. К недостаткам синхронных двигателей относится то, что при пуске их приходится разворачивать посторонним механизмом до частоты вращения, обеспечивающей вращающееся магнитное поле статора. Для устранения этого недостатка применяют асинхронный пуск синхронных электродвигателей, который заключается в том, что при пуске через специальные обмотки ротора перепускают переменный ток от цепи.
Электрооборудование судов
Общие сведения.
Применение на судах электрической энергии в корне изменило условия их эксплуатации, намного облегчив трудоемкие судовые работы, улучшило условия судовождения и управляемость судна, сделало возможным постоянную радиосвязь судна, находящегося в море, с отдаленными на большие расстояния объектами, а также определение местонахождения судна при отсутствии видимости. Появились новые эффективные средства сигнализации и намного улучшились условия обитаемости судна в целом.

Рис. 75. Принципиальная схема электроэнергетической системы. 1 – источники электроэнергии; 2 – главный распределительный щит; 3 – электрические сети; 4-групповые распределительные щиты; 5 – потребители электрической энергии.
Использование ядерной энергии для движения судов, развитие автоматизации судовождения и управления судовыми машинами и механизмами стало осуществимо только при электрификации судов.
Для получения электрической энергии, передачи ее и распределения по потребителям на судах предусмотрена электроэнергетическая система.
Основными элементами всякой судовой электроэнергетической системы являются:
1) источники электроэнергии, состоящие из генераторов постоянного или переменного тока и аккумуляторных батарей; кроме того, судовые электроэнергетические системы имеют различные преобразователи рода тока, его напряжения и частоты;
2) распределительные устройства, состоящие из щитов с аппаратами, распределяющими электроэнергию, и с приборами для управления работой электроустановок и контроля за ней;
3) электрические сети, состоящие из кабелей и проводов, передающих электрическую энергию от источников к потребителям;
4) потребители электрической энергии, представляющие собой различные электродвигатели, преобразующие электроэнергию в механическую работу, а также приборы и аппараты, преобразующие ее в другой вид энергии – тепловую, световую, электромагнитную и пр.
Во время эксплуатации должна быть обеспечена быстрая и надежная защита всех элементов судовых электроэнергетических систем от ненормальных режимов работы (от короткого замыкания или перегрузки). Защита сетей от таких режимов осуществляется автоматическими выключателями (автоматами) или предохранителями.
Основными параметрами судовой электроэнергетической системы считаются: род тока, его напряжение и частота.
Род судового тока выбирается в зависимости от требований потребителей. В судовых электроэнергетических системах применяются как постоянный, так и трехфазный переменный ток. Двигатели постоянного тока обладают следующими преимуществами, делающими их в ряде случаев незаменимыми в эксплуатации:
Двигатели постоянного тока обладают следующими преимуществами, делающими их в ряде случаев незаменимыми в эксплуатации:
а) возможность значительных перегрузок машин при больших пусковых моментах;
б) возможность плавного регулирования числа оборотов двигателей, осуществляемого при помощи реостатов, а также быстрое изменение направления вращения и возможность торможения;
в) относительная простота управления электроприводами.
Но электрические установки постоянного тока имеют и значительные недостатки: большие габариты и вес; сложность конструкций, влияющую на надежность работы машин; относительно низкий к. п. д.
Двигатели переменного тока с пусковой аппаратурой значительно проще по конструкции и надежнее в эксплуатации
Напряжение судового тока в электроэнергетических системах находится в прямой зависимости от мощности и расстояния, на которое передается электроэнергия от источника до потребителя.
На судах напряжение тока, в зависимости от его применения, регламентируется в пределах:
для постоянного тока 12-230 в;
для переменного тока 12, 24, 127, 230 и 400 в.
По требованию техники безопасности считается безопасным напряжение 12 в переменного тока и 24 в постоянного тока.
Наименьшая частота переменного тока в судовых электроэнергетических системах принимается равной 50 гц. В связи со стремлением уменьшать габариты и веса электрических двигателей переменного тока появилась тенденция к повышению номинальной частоты тока с 50 до 400 гц.
Установленное на судах электрооборудование работает в особых условиях, которые должны быть учтены при монтаже оборудования на судне. Эти условия вынуждают предъявлять к изготовлению судового электрооборудования особые требования, отличающиеся от требований к однотипным промышленным образцам.
Судовое электрооборудование должно быть выполнено из коррозионностойких и прочных материалов для повышения надежности его работы, иметь пониженные центры тяжести, а также отвечать другим специальным требованиям.
Источник



