
- Преобразователи частоты
- Виды преобразователей частоты
- Электромашинные частотники.
- Электронные преобразователи.
- Непосредственные преобразователи частоты
- Плюсы непосредственных преобразователей частоты:
- Минусы непосредственных преобразователей частоты:
- Преобразователи частоты с промежуточным звеном постоянного тока.
- Плюсы преобразователей с промежуточным звеном постоянного тока:
- Минусы преобразователей с промежуточным звеном постоянного тока:
- Устройство преобразователей с промежуточным звеном постоянного тока
- Способы управления преобразователем
- ЧП со скалярным управлением
- ЧП с векторным управлением
- Режимы управления частотными преобразователями
- 1) Ручное управление.
- 2) Внешнее управление.
- 3) Управление по дискретным входам или “сухим контактам”.
- 4) Управление по событиям.
- Преимущества частотных преобразователей.
- 1) Экономия электроэнергии.
- 2) Увеличение срока службы промышленного оборудования.
- 3) Отсутствие необходимости проводить техническое обслуживание.
- 4) Возможность удаленного управления и контроля параметров оборудования с электроприводом.
- 5) Широкий диапазон мощности двигателей.
- 6) Защита электродвигателя от аварий и аномальных режимов работы.
- 7) Снижение уровня шума работающего двигателя.
- Сферы применения
- Способы управления частотными преобразователями
Преобразователи частоты
В данной статье мы рассмотрим что такое частотный преобразователь, сферы применения преобразователей частоты, их плюсы и минусы, а также схемы частотников.
Преобразователи частоты (или частотники) – электротехническое оборудование для регулирования частоты переменного напряжения. Основная сфера применения этих устройств – изменение частоты вращения и крутящего момента электрических машин асинхронного типа. Принцип действия управления и регулирования основан на зависимости скорости вращения магнитного поля от частоты питающего напряжения.
Асинхронные электродвигатели широко используются в качестве приводов промышленного оборудования, насосных агрегатов, регулирующей арматуры и других устройств. Основным недостатком этих электрических машин являются постоянная скорость вращения, большие пусковые токи. При помощи частотных преобразователей возможно устранить эти недостатки и существенно расширить сферу применения электродвигателей переменного тока.
Виды преобразователей частоты
Частотные преобразователи различаются по конструкции, принципу действия, способу управления. По конструктивному исполнению преобразователи частоты разделяют на две большие группы:
Электромашинные частотники.
Электромашинные или индукционные преобразователи частоты представляют собой двигатели переменного тока, включенные в режим генератора. Применяются такие электротехнические устройства относительного редко, в условиях, где затруднено или невозможно применение электронных частотных преобразователей.

Электронные преобразователи.
Полупроводниковые ЧП состоят из силовой части, выполненной на транзисторах или тиристорах, и схемы управления на базе микроконтроллеров. Это электротехническое оборудование пригодно для трехфазных и однофазных приводов любого назначения. Различают ЧП с непосредственной связью с питающей сетью и устройства с промежуточным звеном постоянного тока.

Непосредственные преобразователи частоты
Такие частотники построены на базе быстродействующих тиристорных преобразователей, включенных по мостовым, перекрестным, нулевым и встречно-параллельным схемам.
Устройства такого типа включаются непосредственно в питающую сеть.
Плюсы непосредственных преобразователей частоты:
- Возможностью рекуперации электроэнергии в сеть при работе в режиме торможения двигателя. Непосредственное включение обеспечивает двусторонний обмен электричеством.
- Высоким к.п.д. за счет однократного преобразования частоты.
- Возможностью наращивания мощности за счет присоединения дополнительных преобразователей.
- Широким диапазоном низких частот. Непосредственные преобразователи обеспечивают стабильную работу привода на малых скоростях.
Минусы непосредственных преобразователей частоты:
- Аппроксимированная форма выходного напряжения с наличием постоянных составляющих и субгармоник. Такая форма переменного напряжения на выходе устройства вызывает дополнительный нагрев двигателя, снижает момент, создает помехи.
- Частота напряжения на выходе преобразователя не превышает аналогичную характеристику сетевого напряжения. Таким образом, при помощи этих устройств можно только снижать скорость вращения двигателей.
- Основная сфера непосредственных преобразователей – электроприводы на базе асинхронных и синхронных двигателей большой и средней мощности.
Преобразователи частоты с промежуточным звеном постоянного тока.
Частотные преобразователи этого типа выполнены на базе схемы двойного преобразования. Питающее сетевое напряжение преобразуется в постоянное, затем сглаживается и инвертируется в переменное выходное напряжение заданной частоты.
Плюсы преобразователей с промежуточным звеном постоянного тока:
- Возможностью получения выходного напряжения с частотой как выше, так и ниже аналогичного параметра сети питания. Частотники на базе схемы двойного преобразования используют для высоко- средне- и низкоскоростных электроприводов.
- Чистой синусоидальной формой напряжения на выходе. Схема преобразователя позволяет получать переменное напряжение с минимальным отклонением от синусоидальной формы.
- Возможностью построения простых и сложных силовых и управляющих схем для приводов с различными требованиями к скорости реагирования, диапазону скоростей.
- Возможностью адаптации к сетям постоянного тока. Преобразователи данного типа можно приспособить для питания от резервных и аварийных источников постоянного тока без дополнительных устройств. Это позволяет применять такие частотники в приводах ответственного оборудования с резервными источниками электроэнергии.
- Разнообразием алгоритмов управления. Преобразователи со звеном постоянного тока можно запрограммировать и адаптировать практически ко всем электроприводам, в том числе и претенциозным, где требуется особо точное регулирование скорости и момента.
Минусы преобразователей с промежуточным звеном постоянного тока:
- Относительно большую массу и габариты, что обусловлено наличием выпрямительного, фильтрующего и инверторного блоков.
- Повышенные потери мощности. Схема двойного преобразования несколько уменьшает общий к.п.д.
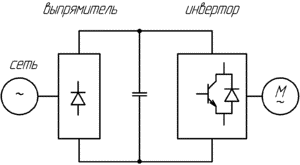
Устройство преобразователей с промежуточным звеном постоянного тока
Состоят такие преобразователи из нескольких основных блоков:
- Выпрямителя. Для ЧП используются диодные и тиристорные преобразователи постоянного тока. Первые отличаются высоким качеством постоянного напряжения практически с полным отсутствием пульсации, низкой стоимостью и надежностью. Однако диодные выпрямители не позволяют реализовать возможность рекуперации электроэнергии в сеть при торможении двигателя. Выпрямители на тиристорах обеспечивают возможность протекания тока в обоих направлениях и позволяют отключать преобразователь от сети без дополнительной коммутирующей аппаратуры.
- Фильтра. Выходное напряжение тиристорных управляемых выпрямителей имеет значительную пульсацию. Для ее сглаживания используют реакторы, емкостные или индуктивно-емкостные фильтры.
- Инвертора. В ЧП используют инверторы напряжения и тока. Последние обеспечивают рекуперацию электроэнергии в сеть и применяются для управления электрическими машинами с частым пуском, реверсом и остановкой, например, крановыми двигателями.
- Частотники на базе инверторов напряжения выдают на выходе напряжение формы “чистый синус”. Благодаря этому преобразователи такого типа получили наиболее широкое распространение.
- Микропроцессора. Этот блок осуществляет управление входным выпрямителем, прием и обработку сигналов с датчиков, взаимодействие с автоматизированной системой высшего уровня, запись и хранение информации о событиях, формирует выходное напряжения ЧП соответствующей частоты. А также выполняет функции защиты от перегрузок, обрыва фазы и других аварийных и ненормальных режимов работы.
Способы управления преобразователем
По принципу управления различают 2 основных вида частотных преобразователей:
ЧП со скалярным управлением
Частотники этого типа выдают на выходе напряжение определенной частоты и амплитуды для поддержания определенного магнитного потока в обмотках статора. Частотники с таким принципом регулирования отличаются относительно низкой стоимостью, простотой конструкции. Нижний предел регулировки скорости составляет около 10 % от номинальной частоты вращения. Их можно использовать для управления сразу несколькими двигателями. Скалярные ЧП используют для приводов насосных агрегатов, вентиляторов и других устройств и оборудования, где не требуется поддерживать скорость вращения ротора вне зависимости от нагрузки.
ЧП с векторным управлением
Микропроцессорные устройства преобразователей с векторным управлением автоматически вычисляют взаимодействие магнитных полей статора и ротора. ЧП такого типа обеспечивают постоянную частоту вращения ротора вне зависимости от нагрузки. Они используются для оборудования, где необходимо поддерживать необходимый момент силы при низких скоростях, высокое быстродействие и точность регулирования. Применение векторных ЧП позволяет регулировать частоту вращения, задавать требуемый момент на валу.
ЧП с векторным управлением делятся на преобразователи бездатчикового типа и устройства с обратной связью по скорости. Последние используются для приводов с широким диапазоном регулирования скорости до 1:1000, необходимости позиционирования точного положения вала, регулирования момента при низких скоростях, точного поддержания частоты вращения, пуска двигателя с номинальным моментом. Преобразователи без датчика скорости применяют для приводов с более низкими требованиями.
Режимы управления частотными преобразователями
В большинстве моделей современных частотных преобразователей реализована возможность управления в нескольких режимах:
1) Ручное управление.
2) Внешнее управление.
3) Управление по дискретным входам или “сухим контактам”.
4) Управление по событиям.

Преимущества частотных преобразователей.
1) Экономия электроэнергии.
2) Увеличение срока службы промышленного оборудования.
3) Отсутствие необходимости проводить техническое обслуживание.
4) Возможность удаленного управления и контроля параметров оборудования с электроприводом.
5) Широкий диапазон мощности двигателей.
6) Защита электродвигателя от аварий и аномальных режимов работы.
7) Снижение уровня шума работающего двигателя.

Сферы применения
Частотно-регулируемые приводы применяют:
- Для кранов и грузоподъемных машин . Крановые двигатели работают в режиме частых пусков, остановок, изменяющейся нагрузки. ЧП обеспечивают отсутствие рывков и раскачивания груза при пусках и остановках, остановку крана точно в требуемом месте, снижают нагрев электродвигателей и максимальный пусковой момент.
- Для привода нагнетательных вентиляторов в котельных и дымососов. Общее управление с плавной регулировкой дутьевых и вытяжных вентиляторов позволяет автоматизировать процесс горения и обеспечить максимальный к.п.д . котельных агрегатов.
- Для транспортеров, прокатных станов, конвейеров, лифтов. ЧП регулирует скорость перемещения транспортного оборудования без рывков и ударов, что увеличивает срок службы механических узлов. Для насосных агрегатов. ЧП позволяют обойтись без задвижек и вентилей, регулирующих давление и производительность, и существенно увеличить общий к.п.д системы водоподачи.
- Для электродвигателей станков. Использование преобразователя частоты вместо коробки передач позволяет плавно увеличивать или уменьшать частоту вращения рабочего органа станка, осуществлять реверс. ЧП широко используются для станков с ЧПУ и высокоточного промышленного оборудования.
Внедрение частотно-регулируемых приводов дает значительный экономический эффект. Снижение затрат достигается за счет сокращения потребления электроэнергии, расходов на ремонт и ТО двигателей и оборудования, возможности использования более дешевых асинхронных электродвигателей с короткозамкнутым ротором, а также сокращения других производственных издержек. Средний срок окупаемости частотных преобразователей составляет от 3-х месяцев до трех лет.
Источник
Способы управления частотными преобразователями

 О проекте О проекте
О проекте О проекте - Главная
- О проекте
- Карта сайта
- Вопрос-ответ
- ПЧ и УПП ПЧ и УПП
- Терминология Терминология
- Низковольтные ПЧ
- Высоковольтные ПЧ
- Низковольтные УПП
- Высоковольтные УПП
- Станции управления
- Аксессуары
- Теория
- Подбор ПЧ и УПП
- Монтаж ПЧ и УПП
- Энергосбережение
- Пресс-центр Пресс-центр
- Новости сайта
- Интервью
- Статьи
- Мероприятия
- Акции
- Обзор рынка Обзор рынка
- Производители Производители
- ABB
- Advanced Control Indastrial Equipment
- AuCom Electronics Ltd
- B&R
- Baumuller
- Bosch Rexroth
- Control Techniques
- Danfoss
- Delta Electronics
- Easy Drive
- Eaton
- EKF
- Emotron AB
- ERMAN
- ESQ
- EURA Drives
- Fuji Electric
- GE
- Gefran Siei
- Grandrive
- Hitachi
- Hyundai Heavy Industries
- IC Electronics
- IDS Drive
- IEK
- INNOVERT
- Inovance
- INSTART
- Invertek drivers
- Invt
- Jacky Enterprise
- Keb
- Lenze
- LS
- Micno
- Mitsubishi Electric
- Omron
- ONI
- Parker
- Powtran
- Prostar
- Rockwell Automation
- Santerno
- Schneider Electric
- Sew Eurodrive
- Siemens
- Tecorp Electronics
- Toshiba
- Vacon
- Weg
- Yaskawa
- Битек
- Веспер Автоматика
- Вниир
- Горнозаводское Объединение
- Ижевский Радиозавод
- Овен
- Оптимэлектро
- Приводная техника
- Русэлком
- Силиум
- Стройтехавтоматика
- Технорос
- Триол
- ЧЭАЗ-ЭЛПРИ
- ЭКРА
- Электровыпрямитель
- Электрозавод
- Электротекс
- Элсиэл
- Эрасиб
- Эффективные Системы
- Серии
- Рынок
- Купить Купить
- Поставщики Поставщики
- КосПА
- ONI
- СТОИК
- Danfoss
- Веспер
- EKF
- Инжиниринг
- Библиотека Библиотека
- Каталоги
- ГОСТ и ТУ
- Видео
- Контакты Контакты
- Обратная связь
- Сотрудничество
- Реклама на сайте
- Вакансии
- Ответственность
 О проекте О проекте
О проекте О проекте 
- Главная
- Статьи
- Методы управления преобразователем частоты.
Согласно последним данным статистики примерно 70% всей выработанной электроэнергии в мире потребляет электропривод. И с каждым годом этот процент растет.
При правильно подобранном способе управления электродвигателем возможно получение максимального КПД, максимального крутящего момента на валу электромашины, и при этом повысится общая производительность механизма. Эффективно работающие электродвигатели потребляют минимум электроэнергии и обеспечивают максимальную экономичность.
Для электродвигателей, работающих от преобразователя частоты ПЧ, эффективность во многом будет зависеть от выбранного способа управления электрической машиной. Только поняв достоинства каждого способа, инженеры и проектировщики систем электроприводов смогут получить максимальную производительность от каждого способа управления.
Для асинхронных электродвигателей, подключенных к преобразователю частоты, существуют следующие основные способа управления:
· Скалярное управление U/f;
· Скалярное управление U/f с энкодером;
· Векторное управление с разомкнутым контуром;
· Векторное управление с замкнутым контуром;
Все четыре метода используют широтно-импульсную модуляцию ШИМ, которая изменяет ширину фиксированного сигнала путем изменения длительности импульсов для создания аналогового сигнала.
СКАЛЯРНОЕ РЕГУЛИРОВАНИЕ
Способ управления U/f
Скалярный метод управления асинхронным электродвигателем переменного тока, заключается в том, чтобы поддерживать постоянным отношение напряжение/частота (U/f) во всем рабочем диапазоне скоростей, при этом контролируется только величина и частота питающего напряжения.
Отношение U/f вычисляется на основе номинальных значений (напряжения и частоты) контролируемого электродвигателя переменного тока. Поддерживая постоянным значение отношения U/f мы можем поддерживать относительно постоянным магнитный поток в зазоре двигателя. Если отношение U/f увеличивается тогда электродвигатель становится перевозбужденным и наоборот если отношение уменьшается двигатель находится в невозбуждённом состоянии.

Зависимость частоты питания двигателя от времени при скалярном упрравлении

Изменение напряжения питания электродвигателя при скалярном управлении
На низких оборотах необходимо компенсировать падение напряжения на сопротивлении статора, поэтому отношение U/f на низких оборотах устанавливают выше чем номинальное значение. Скалярный метод управления наиболее широко используется для управления асинхронными электродвигателями. Он часто используется в несложных системах электропривода из-за своей простоты и минимального количества необходимых для работы параметров. Такой способ управления не требует обязательной установки энкодера и обязательных настроек для частотно-регулируемого электропривода. Это приводит к меньшим затратам на вспомогательное оборудование (датчики, провода обратных связей, реле и так далее). Управление U/f довольно часто применяют в высокочастотном оборудовании, например, его часто используют в станках с ЧПУ для привода вращения шпинделя.
U/f — это единственный способ регулирования скорости асинхронного электродвигателя, который позволяет регулирование нескольких электроприводов от одного преобразователя частоты. Соответственно все машины запускаются и останавливаются одновременно и работают с одной частотой.
Но данный способ управления имеет несколько ограничений. Например, при использовании способа регулирования U/f без энкодера нет абсолютно никакой уверенности, что вал асинхронной машины вращается. Кроме того, пусковой момент электрической машины при частоте 3 Гц ограничивается 150%. Да, ограниченного крутящего момента более чем достаточно для применения в большинстве существующего оборудования. Например, практически все вентиляторы и насосы используют способ регулирования U/f.
Данный метод относительно прост из-за его более «свободной» спецификации. Регулирование скорости, как правило, лежит в диапазоне 2% — 3% максимальной выходной частоты. Отклик по скорости рассчитывается на частоту свыше 3 Гц. Скорость реагирования частотного преобразователя определяется быстротой его реакции на изменение опорной частоты. Чем выше скорость реагирования – тем быстрее будет реакция электропривода на изменение задания скорости.
Диапазон регулирования скорости при использовании способа U/f составляет 1:40. Умножив это соотношение на максимальную рабочую частоту электропривода, получим значение минимальной частоты, на которой сможет работать электрическая машина. Например, если максимальное значение частоты 60 Гц, а диапазон составляет 1:40, то минимальное значение частоты составит 1,5 Гц.
Паттерн U/f определяет соотношение частоты и напряжения в процессе работы частотно-регулируемого электропривода. Согласно ему, кривая задания скорости вращения (частота электродвигателя) будет определять помимо значения частоты еще и значения напряжения, подводимого к клеммам электрической машины.
Операторы и технические специалисты могут выбрать необходимый шаблон регулирования U/f одним параметром в современном частотном преобразователе. Предустановленные шаблоны уже оптимизированы под конкретные применения. Также существуют возможности создания своих шаблонов, которые будут оптимизироваться под конкретную систему частотно-регулируемого электропривода или электродвигателя.
Такие устройства как вентиляторы или насосы имеют момент нагрузки, который зависит от скорости их вращения. Переменный крутящий момент (рисунок выше) шаблона U/f предотвращает ошибки регулирования и повышает эффективность. Эта модель регулирования уменьшает токи намагничивания на низких частотах за счет снижения напряжения на электрической машине.
Механизмы с постоянным крутящим моментом, такие как конвейеры, экструдеры и другое оборудование используют способ регулирования с постоянным моментом. При постоянной нагрузке необходим полный ток намагничивания на всех скоростях. Соответственно характеристика имеет прямой наклон во всем диапазоне скоростей.
Способ управления U/f с энкодером
При скалярном методе управления, скорость асинхронного электродвигателя контролируется установкой величины напряжения и частоты статора, таким образом, чтобы магнитное поле в зазоре поддерживалось на нужной величине. Для поддержания постоянного магнитного поля в зазоре, отношение U/f должно быть постоянным на разных скоростях.
При увеличении скорости напряжение питания статора так же должно пропорционально увеличиваться. Однако синхронная частота асинхронного двигателя не равна частоте вращения вала, а скольжение асинхронного двигателя зависит от нагрузки. Таким образом система контроля со скалярным управлением без обратной связи не может точно контролировать скорость при наличии нагрузки. Для решения этой задачи в систему может быть добавлена обратная связь по скорости, а следовательно и компенсация скольжения.
Таким образом, если необходимо повысить точность регулирования скорости вращения в систему управления добавляют энкодер. Введение обратной связи по скорости с помощью энкодера позволяет повысить точность регулирования до 0,03%. Выходное напряжение по-прежнему будет определятся заданным шаблоном U/f.
Данный способ управления не получил широкого применения, так как представляемые им преимущества по сравнению со стандартными функциями U/f минимальны. Пусковой момент, скорость отклика и диапазон регулирования скорости – все идентично со стандартным U/f. Кроме того, при повышении рабочих частот могут возникнуть проблемы с работой энкодера, так как он имеет ограниченное количество оборотов.
Когда используется скалярное управлени
Скалярное управление электродвигателями переменного тока — хорошая альтернатива для применений, где нет переменной нагрузки и отсутвуют высокие динамические нагрузки (вентиляторы, насосы). Для работы скалярного управления не требуется датчик положения ротора, а скорость ротора может быть оценена по частоте питающего напряжения. Когда используется скалярное управление, не требуется высокопроизводительный цифровой сигнальный процессор как в случае с векторным управлением.
При скалярном управлении электродвигателем токи статора не контролируются напрямую.
А процесс скалярного регулирования синхронного двигателя с постоянными магнитами может легко стать неуправляемым (выйти из синхронного состояния) особенно когда момент нагрузки превышает значение предельного момента электропривода. Скалярный метод не подходит для управления синхронным двигатлем на низких оборотах с высокими динамическими нагрузками.
Метод скалярного управления относительно прост в реализации, но обладает несколькими существенными недостатками:
· во-первых, если не установлен датчик скорости нельзя управлять скоростью вращения вала асинхронного двигателя, так как она зависит от нагрузки (наличие датчика скорости решает эту проблему), а вслучае с синхронным двигателем при изменении нагрузки — можно совсем потерять управление;
· во-вторых, нельзя управлять моментом. Конечно, эту задачу можно решить с помощью датчика момента, но стоимость его установки очень высока, и будет скорее всего выше самого электропривода. При этом управление моментом будет очень инерционным;
· также нельзя управлять одновременно моментом и скоростью.
Скалярное управление достаточно для большинства задач в которых применяется электропривод с диапазоном регулирования частоты вращения двигателя до 1:10.
Когда требуется максимальное быстродействие, возможность регулирования в широком диапазоне скоростей и возможность управления моментом электродвигателя используется векторное управление.
ВЕКТОРНОЕ РЕГУЛИРОВАНИЕ
Векторное управление — метод управления бесщеточными электродвигателями переменного тока, который позволяет независимо и практически безынерционно регулировать скорость вращения и момент на валу электродвигателя.
Главная идея векторного управления заключается в том, чтобы контролировать не только величину и частоту напряжения питания, но и фазу. Другими словами, контролируется величина и угол пространственного вектора. Векторное управление в сравнении со скалярным обладает более высокой производительностью. Векторное управление избавляет практически от всех недостатков скалярного управления.
Векторное управление без обратной связи
Векторное управление (ВУ) без обратной связи используется для более широкого и динамичного регулирования скорости электрической машины. При пуске от преобразователя частоты электродвигатели могут развивать пусковой момент в 200% от номинального при частоте всего 0,3 Гц. Это значительно расширяет перечень механизмов, где может быть применен асинхронный электропривод с векторным управлением. Этот метод также позволяет управлять моментом машины во всех четырех квадрантах.
Ограничение вращающего момента осуществляется двигателем. Это необходимо для предотвращения повреждения оборудования, машин или продукции. Значение моментов разбивают на четыре различных квадранта, в зависимости направления вращения электрической машины (вперед или назад) и в зависимости от того, реализует ли электродвигатель режим рекуперативного торможения. Ограничения могут устанавливаться для каждого квадранта отдельно или же пользователь может задать общий вращающий момент в преобразователе частоты.
Двигательный режим асинхронной машины будет при условии, что магнитное поле ротора отстает от магнитного поля статора. Если магнитное поле ротора начнет опережать магнитное поле статора, то тогда машина войдет в режим рекуперативного торможения с отдачей энергии, проще говоря – асинхронный двигатель перейдет в генераторный режим.
Например, машина по закупорке бутылок может использовать ограничение момента в квадранте 1 (направление вперед с положительным моментом) для предотвращения чрезмерного затягивания крышки бутылки. Механизм производит движение вперед и использует положительный момент для того, чтобы закрутить крышку бутылки. А вот устройство, такое как лифт, с противовесом тяжелее, чем пустая кабина, будет использовать квадрант 2 (обратное вращение и положительный момент). Если кабина подымается на верхний этаж, то крутящий момент будет противоположен скорости. Это необходимо для ограничения скорости подъема и недопущения свободного падения противовеса, так как он тяжелее, чем кабина.
Обратная связь по току в данных преобразователях частоты ПЧ позволяет устанавливать ограничения по моменту и току электродвигателя, поскольку при увеличении тока растет и момент. Выходное напряжение ПЧ может изменятся в сторону увеличения, если механизм требует приложения большего крутящего момента, или уменьшатся, если достигнуто его предельно допустимое значение. Это делает принцип векторного управления асинхронной машиной более гибким и динамичным по сравнению с принципом U/F.
Также частотные преобразователи с векторным управлением и разомкнутым контуром имеют более быстрый отклик по скорости – 10 Гц, что делает возможным его применение в механизмах с ударными нагрузками. Например, в дробилках горной породы нагрузка постоянно меняется и зависит от объема и габаритов обрабатываемой породы.
В отличии от шаблона управления U/F векторное управление использует векторный алгоритм, для определения максимально эффективного напряжения работы электродвигателя.

Векторное управления ВУ решает данную задачу благодаря наличию обратной связи по току двигателя. Как правило, обратная связь по току формируется внутренними трансформаторами тока самого преобразователя частоты ПЧ. Благодаря полученному значению тока преобразователь частоты проводит вычисления вращающего момента и потока электрической машины. Базовый вектор тока двигателя математически расщепляется на вектор тока намагничивания и крутящего момента.
Используя данные и параметры электрической машины ПЧ вычисляет векторы тока намагничивания и крутящего момента. Для достижения максимальной производительности, преобразователь частоты должен держать данные вектора разведенными на угол 90 0 . Это существенно, так как sin 90 0 = 1, а значение 1 представляет собой максимальное значение крутящего момента.
В целом векторное управление асинхронным электродвигателем осуществляет более жесткий контроль. Регулирование скорости составляет примерно ±0,2% от максимальной частоты, а диапазон регулирования достигает 1:200, что позволяет сохранять вращающий момент при работе на низких скоростях.
Векторное управление с обратной связью
Векторное управление с обратной связью использует тот же алгоритм управления, что и ВУ без обратной связи. Основное различие заключается в наличии энкодера, что дает возможность частотно-регулируемому электроприводу развивать 200% пусковой момент при скорости 0 об/мин. Этот пункт просто необходим для создания начального момента при трогании с места лифтов, кранов и других подъемных машин, чтоб не допустить просадки груза.
Наличие датчика обратной связи по скорости позволяет увеличить время отклика системы более 50 Гц, а также расширить диапазон регулирования скорости до 1:1500. Также наличие обратной связи позволяет управлять не скоростью электрической машиной, а моментом. В некоторых механизмах именно значение момента имеет большую важность. Например, мотальная машина, механизмы закупорки и другие. В таких устройствах необходимо регулировать момент машины.
Преимущества векторного управления:
· высокая точность регулирования скорости;
· плавный старт и плавное вращение двигателя во всем диапазоне частот;
· быстрая реакция на изменение нагрузки: при изменении нагрузки практически не происходит изменения скорости;
· увеличенный диапазон управления и точность регулирования;
· снижаются потери на нагрев и намагничивание, повышается КПД электродвигателя.
К недостаткам векторного управления можно отнести:
· необходимость задания параметров электродвигателя;
· большие колебания скорости при постоянной нагрузке;
· большая вычислительная сложность.
Сравнительная таблица методов управления частотным преобразователем.
Метод управления
Диапазон управления скоростью
Погрешность скорости 3 , %
Время нарастания момента, мс
Источник



