
- Способы управления асинхронным двигателем.
- Способы управления асинхронным двигателем
- Что такое асинхронный двигатель?
- Как можно управлять скоростью вращения двигателя?
- Управление асинхронным двигателем
- Формы и схема векторного управления
- Управление частотными контроллерами
- Управление частотными контроллерами
- Управление асинхронным двигателем. Три наиболее популярные схемы.
- Управление асинхронным двигателем
Способы управления асинхронным двигателем.
Под управлением асинхронным двигателем переменного тока понимается изменение частоты вращения ротора и/или его момента.
Существуют следующие способы управления асинхронным двигателем:
реостатный — изменение частоты вращения асинхронного двигателя с фазным ротором путём изменения сопротивления реостата в цепи ротора, кроме того это увеличивает пусковой момент и повышает критическое скольжение;
частотный — изменение частоты вращения асинхронного двигателя путём изменения частоты тока в питающей сети, что влечёт за собой изменение частоты вращения поля статора. Применяется включение двигателя через частотный преобразователь;
переключением обмоток со схемы «звезда» на схему «треугольник» в процессе пуска двигателя, что даёт снижение пусковых токов в обмотках примерно в три раза, но в то же время снижается и момент;
импульсный — подачей напряжения питания специального вида (например, пилообразного);
введение добавочной ЭДС согласно или противонаправлено с частотой скольжения во вторичную цепь;
изменением числа пар полюсов, если такое переключение предусмотрено конструктивно (только для короткозамкнутых роторов);
изменением амплитуды питающего напряжения, когда изменяется только амплитуда (или действующее значение) управляющего напряжения. Тогда вектора напряжений управления и возбуждения остаются перпендикулярны (автотрансформаторный пуск);
фазовое управление характерно тем, что изменение частоты вращения ротора достигается путём изменения сдвига фаз между векторами напряжений возбуждения и управления;
амплитудно-фазовый способ включает в себя два описаных способа;
включение в цепь питания статора реакторов;
индуктивное сопротивление для двигателя с фазным ротором.
Задача.
3)r=, r 1.20(17n(tраб-20)=0,8(1+0,004(110-20)=1,1 Ом
Источник
Способы управления асинхронным двигателем
Электропривод сегодня является основой большинства подъемно-транспортных, обрабатывающих комплексов. Одним из способов их плавной работы является векторное управление асинхронным двигателем, преобразующим электрическую энергию в механическую – вращение приводного вала и связанных с ним механизмов.
Что такое асинхронный двигатель?
Прежде чем переходить к модели, алгоритмам и системам управления электроприводом, нужно точно знать, что он собой представляет. Это позволяет выявить в его цепи такие моменты, которые можно будет использовать для организации плавного изменения ключевых характеристик (частота/скорость вращения, напряжение). Соответственно, можно определить параметры контроллера, разработать технологические карты для его размещения в шкафу и обслуживания.
Работа любого асинхронного двигателя базируется на возбуждении на контактных обмотках магнитного поля при подаче электричества от шкафа управления. Оно возникает на статоре – неподвижной части двигателя, которая состоит из кольцевого сердечника (магнитопровода), собранного из отдельных металлических пластин. Каждая из них имеет концентрические пазы на внутренней стороне кольца, которые при совмещении образуют продольные пазы. Они служат для намотки проволоки, составляющей основу статорной обмотки.

Также асинхронный двигатель имеет подвижную часть – ротор, совмещенный с приводным валом. Он также имеет пластинчатый сердечник с пазами, но уже на внешней стороне. Вместо проволоки используются медные прутки, которые по краям замыкаются пластинами (такой вариант двигателя называется с короткозамкнутым ротором).
За счет того, что частоты вращения магнитных полей статора и ротора отличаются, в обмотках последнего за счет индукции наводится электрический ток. Он, в свою очередь, побуждает электромагнитную силу, приводящую ротор в движение (вращение). Разница частот обычно называется скольжением. Его величина составляет порядка 2…10%.
Как можно управлять скоростью вращения двигателя?
Очевидно, что двигатель в обычном режиме работы от сети (электрического шкафа) имеет стандартную скорость/частоту вращения. Это ограничивает прямое его использование, вынуждая применять различные редукторные механизмы для понижения частоты до требуемой. Но даже тогда нет возможности динамично менять обороты, а вместе с ними, мощность, подачу, поскольку все равно остаются фиксированными частоты на выходе из двигателя и редуктора. Для расширения существующих рамок используют разные способы управления (частотные, импульсные, фазные и т. д), которые можно разделить на две большие группы:
- Скалярное. Как правило, используется на приводных двигателях компрессорных, вентиляторных, насосных и прочих механизмов, где требуется контроль скорости вращения или любого другого параметра, связанного с датчиками,
- Векторное. Это усовершенствованная концепция, которая предполагает раздельный, независимый контроль, изменение момента и магнитного потока. Токосцепление ротора поддерживается на постоянном уровне, что позволяет сохранить максимальный показатель момента.
Управление асинхронным двигателем
Отличие скалярного от векторного управления как раз заключается в возможности осуществления контроля возбуждения (потока). Фактически, он представляется как двигатель постоянного тока, имеющий независимые друг от друга обмотки. Такой подход позволяет создать подобную математическую модель системы работы контроллера.
Формы и схема векторного управления
Все существующие на сегодня системы векторного управления работой двигателей можно разделить на две группы:
- Датчиковые. Блок управления работой двигателя имеет с ним обратную связь по скорости, с помощью расположения на валу соответствующих датчиков,
- Бездатчиковые. Это системы, которые работают без датчиков скорости на основном валу.
Датчиковые системы являются более сложными, так как точность контроля составляет 1:10000. Бездатчиковые системы работают на уровне не более 1:100. Все частотники с учетом уровня создаваемых помех устанавливаются в центральных или отдельных шкафах.
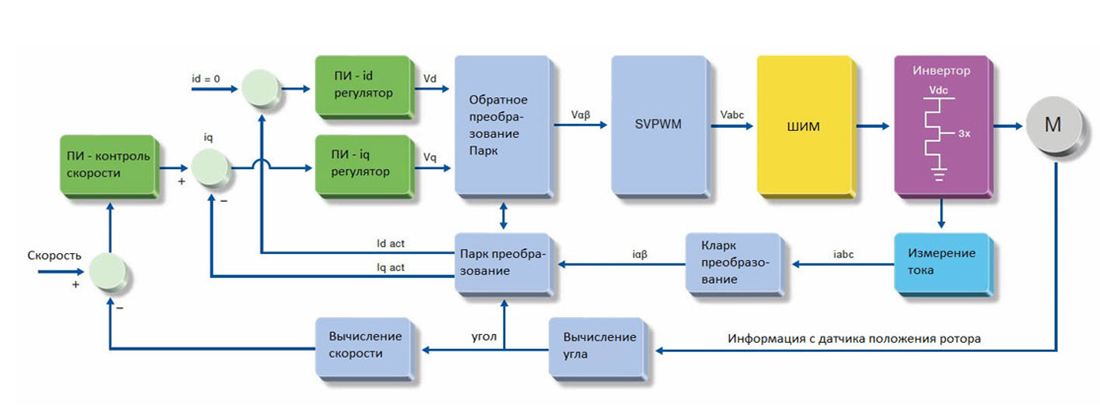
Если представить все выше сказанное как наглядную схему, то получится нечто следующее:
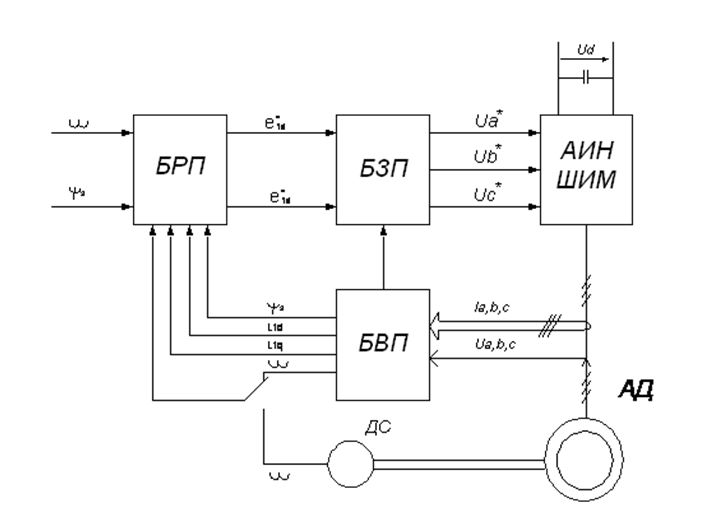
Здесь можно видеть такие ключевые компоненты системы управления, как:
- АД – собственно, асинхронный двигатель (объект контроля),
- БРП – логический блок регуляторов для переменных уравнения,
- БВП – логический блок, отвечающий за вычисления по переменным,
- БЗП – блок, задающий значения переменных,
- ДС – датчик скорости на валу двигателя,
- АИН ШИМ – блок амплитудно-импульсной/широтно-импульсной модуляции.
То, что на схеме отображено в виде блоков, на практике является всего лишь параметрическими элементами цепи управления, которая реализуется на микроконтроллере. Соответственно, сам контроллер и сопутствующие исполнительные механизмы монтируются в электрический шкаф. Для правильного монтажа разрабатывается технологическая карта.
Управление частотными контроллерами
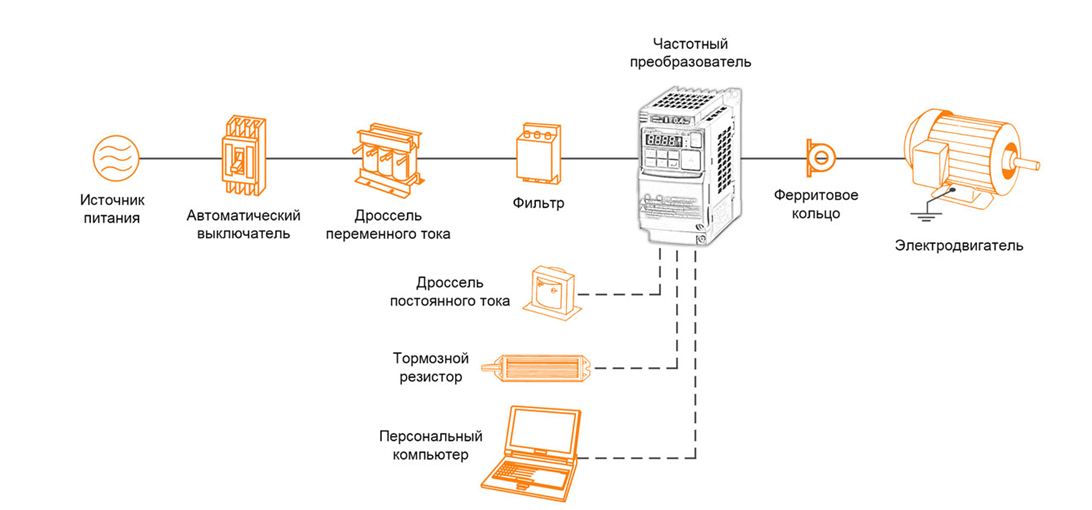
Современные преобразователи частоты тока/напряжения работают и по скалярному, и по векторному варианту, используя параметрические математические модели, реализованные в программном коде встроенного микроконтроллера. Частотники электронного типа работают на тиристорных мостовых схемах и включают следующие основные компоненты:
- Выпрямитель – тиристорный или транзисторный мост, преобразующий переменный ток в постоянный,
- Инвертор – блок АИМ/ШИМ, работающий по обратному принципу, то есть преобразующий постоянный ток в переменный.
Поскольку такой переход так или иначе влияет на форму графика выходного напряжения, то блочный контроллер/частотник может использовать в схеме дросселя и специальные ЕМС фильтры. Последние применяют для снижения интенсивности электромагнитных помех.
Управление частотными контроллерами
Центральный контроллер обеспечивает параметрическое управление схемой, а также вспомогательными задачами, например, диагностикой состояния, защитой от перегрузок и т. п. Сам частотник обычно монтируется в отдельный шкаф, чтобы уменьшить электромагнитные помехи на оборудование.
В целом, векторное управление, организованное на современном контроллере и преобразователе частоты, позволяет добиться плавного регулирования ключевых величин, а также побочных параметров работы оборудования. Ввиду наличия электромагнитных помех при работе, частотники обычно размещают отдельно от основного электрического шкафа.
Источник
Управление асинхронным двигателем. Три наиболее популярные схемы.

Управление асинхронным двигателем
Здравствуйте, дорогие читатели! Сегодня поговорим про управление асинхронным двигателем, а так же рассмотрим три простые схемы, которые применяются наиболее часто.
Все электрические принципиальные схемы станков, установок и машин содержат определенный набор типовых блоков и узлов, которые комбинируются между собой определенным образом. В релейно-контакторных схемах главными элементами управления двигателями являются электромагнитные пускатели и реле.
Наиболее часто в качестве привода в станках и установках применяются трехфазные асинхронные двигатели с короткозамкнутым ротором. Эти двигатели просты в устройстве, обслуживании и ремонте. Они удовлетворяют большинству требований к электроприводу станков. Главными недостатками асинхронных двигателей с короткозамкнутым ротором являются большие пусковые токи (в 5-7 раз больше номинального) и невозможность простыми методами плавно изменять скорость вращения двигателей.
С появлением и активным внедрением в схемы электроустановок преобразователей частоты такие двигатели начали активно вытеснять другие типы двигателей (асинхронные с фазным ротором и двигатели постоянного тока) из электроприводов, где требовалось ограничивать пусковые токи и плавно регулировать скорость вращения в процессе работы.

Асинхронный двигатель с короткозамкнутым ротором
Одной из преимуществ использования асинхронных двигателей с короткозамкнутым ротором является простота их включения в сеть. Достаточно подать на статор двигателя трехфазное напряжение и двигатель сразу запускается. В самом простом варианте для включения можно использовать трехфазный рубильник или пакетный выключатель. Но эти аппараты при своей простоте и надежности являются аппаратами ручного управления.
В схемах же станков и установок часто должна быть предусмотрена работа того или иного двигателя в автоматическом цикле, обеспечиваться очередность включения нескольких двигателей, автоматическое изменение направления вращения ротора двигателя (реверс) и т.д.
Обеспечить все эти функции с аппаратами ручного управления невозможно, хотя в ряде старых металлорежущих станков тот же реверс и переключение числа пар полюсов для изменения скорости вращения ротора двигателя очень часто выполняется с помощью пакетных переключателей. Рубильники и пакетные выключатели в схемах часто используются как вводные устройства, подающие напряжение на схему станка. Все же операции управления двигателями выполняются электромагнитными пускателями.
Включение двигателя через электромагнитный пускатель обеспечивает кроме всех удобств при управлении еще и нулевую защиту. Что это такое будет рассказано ниже.

Электромагнитный пускатель
Наиболее часто в станках, установках и машинах применяются три электрические схемы:
схема управления нереверсивным двигателем с использованием одного электромагнитного пускателя и двух кнопок «пуск» и «стоп»,
схема управления реверсивным двигателем с использованием двух пускателей (или одного реверсивного пускателя) и трех кнопок.
схема управления реверсивным двигателем с использованием двух пускателей (или одного реверсивного пускателя) и трех кнопок, в двух из которых используются спаренные контакты.
Разберем принцип работы всех этих схем.
1. Управление асинхронным двигателем с помощью одного магнитного пускателя
Схема показана на рисунке.

Управление асинхронным двигателем с помощью магнитного пускателя
При нажатии на кнопку SB2 «Пуск» катушка пускателя попадает под напряжение 220 В, т.к. она оказывается включенной между фазой С и нулем ( N) . Подвижная часть пускателя притягивается к неподвижной, замыкая при этом свои контакты. Силовые контакты пускателя подают напряжение на двигатель, а блокировочный замыкается параллельно кнопке «Пуск». Благодаря этому при отпускании кнопки катушка пускателя не теряет питание, т.к. ток в этом случае идет через блокировочный контакт.
Если бы блокировочный контакт не был бы подключен параллельно кнопки (по какой-либо причине отсутствовал), то при отпускании кнопки «Пуск» катушка теряет питание и силовые контакты пускателя размыкаются в цепи двигателя, после чего он отключается. Такой режим работы называют «толчковым». Применяется он в некоторых установках, например в схемах кран-балок.
Остановка работающего двигателя после запуска в схеме с блокировочным контактом выполняется с помощью кнопки SB1 «Стоп». При этом, кнопка создает разрыв в цепи, магнитный пускатель теряет питание и своими силовыми контактами отключает двигатель от питающей сети.
В случае исчезновения напряжения по какой-либо причине магнитный пускатель также отключается, т.к. это равносильно нажатию на кнопку «Стоп» и созданию разрыва цепи. Двигатель останавливается и повторный запуск его при наличии напряжения возможен только при нажатии на кнопку SB2 «Пуск». Таким образом, магнитный пускатель обеспечивает т.н. «нулевую защиту». Если бы он в цепи отсутствовал и двигатель управлялся рубильником или пакетным выключателем, то при возврате напряжения двигатель запускался бы автоматически, что несет серьезную опасность для обслуживающего персонала.
2. Схема управления реверсивным двигателем с помощью двух магнитных пускателей
Схема работает аналогично предыдущей. Изменение направления вращения (реверс) ротор двигателя меняет при изменении порядка чередования фаз на его статоре. При включении пускателя КМ1 на двигатель приходят фазы — A , B , С, а при включении пускателя KM2 — порядок фаз меняется на С, B , A.
Схема показана на рис. 2.

Управление асинхронным двигателем с помощью двух магнитных пускателей
Включение двигателя на вращение в одну сторону осуществляется кнопкой SB2 и электромагнитным пускателем KM1 . При необходимости смены направления вращения необходимо нажать на кнопку SB1 «Стоп», двигатель остановится и после этого при нажатии на кнопку SB 3 двигатель начинает вращаться в другую сторону. В этой схеме для смены направления вращения ротора необходимо промежуточное нажатие на кнопку «Стоп».
Кроме этого, в схеме обязательно использование в цепях каждого из пускателей нормально-закрытых (размыкающих) контактов для обеспечения защиты от одновременного нажатия двух кнопок «Пуск» SB2 — SB 3, что приведет к короткому замыканию в цепях питания двигателя. Дополнительные контакты в цепях пускателей не дают пускателям включится одновременно, т.к. какой-либо из пускателей при нажатии на обе кнопки «Пуск» включиться на секунду раньше и разомкнет свой контакт в цепи другого пускателя.
Необходимость в создании такой блокировки требует использования пускателей с большим количеством контактов или пускателей с контактными приставками, что удорожает и усложняет электрическую схему.
3. Схема управления реверсивным двигателем с помощью двух магнитных пускателей и трех кнопок (две из которых имеют контакты с механической связью)
Схема показана на рисунке.
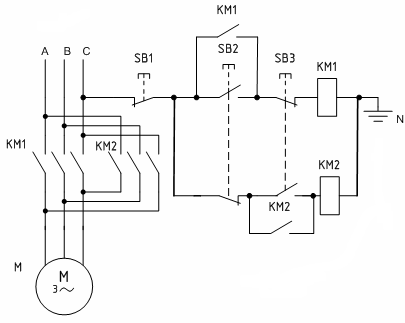
Управление асинхронным двигателем с помощью двух магнитных пускателей и трех кнопок (две из которых имеют контакты с механической связью)
Отличие этой схемы от предыдущей в том, что в цепи каждого пускателя кроме общей кнопки SB1 «Стоп»включены по 2 контакта кнопок SB2 и SB 3, причем в цепи КМ1 кнопка SB2 имеет нормально-открытый контакт (замыкающий), а SB 3 — нормально-закрытый (размыкающий) контакт, в цепи КМ3 — кнопка SB2 имеет нормально-закрытый контакт (размыкающий), а SB 3 — нормально-открытый. При нажатии каждой из кнопок цепь одного из пускателей замыкается, а цепь другого одновременно при этом размыкается.
Такое использование кнопок позволяет отказаться от использования дополнительных контактов для защиты от одновременного включения двух пускателей (такой режим при этой схеме невозможен) и дает возможность выполнять реверс без промежуточного нажатия на кнопку «Стоп», что очень удобно. Кнопка «Стоп» нужна для окончательной остановки двигателя.
Приведенные в статье схемы являются упрощенными. В них отсутствуют аппараты защиты (автоматические выключатели, тепловые реле), элементы сигнализации. Такие схемы также часто дополняются различными контактами реле, выключателей, переключателей и датчиков. Также возможно питание катушки электромагнитного пускателя напряжение 380 В. В этом случае он подключается от двух любых фаз, например, от А и B . Возможно использование понижающего трансформатора для понижения напряжения в схеме управления. В этом случае используются электромагнитные пускатели с катушками на напряжение 110, 48, 36 или 24 В.
Источник



