
- Способы торможения электродвигателей
- Схемы торможения двигателей постоянного тока
- Способы и схемы торможения электродвигателей
- Способы электрического торможения электроприводов
- Противовключения
- Динамическая остановка электропривода
- Режимы торможения моторов постоянного тока
- Рекуперативное торможение электрических машин
- Режим рекуперации в асинхронных электрических машинах
- Комбинированный режим
Способы торможения электродвигателей
 Электродвигатели в электроприводе могут быстро остановить производственный механизм, или удержать определенную скорость при положительном моменте рабочей машины. В этом случае двигатель обращается в генератор и работает в одном из тормозных режимов : противовключения, динамическом, рекуперативном (смотрите рис. 1) в зависимости от способа возбуждения.
Электродвигатели в электроприводе могут быстро остановить производственный механизм, или удержать определенную скорость при положительном моменте рабочей машины. В этом случае двигатель обращается в генератор и работает в одном из тормозных режимов : противовключения, динамическом, рекуперативном (смотрите рис. 1) в зависимости от способа возбуждения.
Торможение электропривода посредством переключения обмоток фаз электродвигателя для получения вращения поля в противоположном направлении ( торможение противовключением ) применяют, когда необходимо быстро остановить машинное устройство. При этом по инерции ротор вращается навстречу магнитному потоку, скольжение электродвигателя становится больше единицы, а момент — отрицательным.
В двигателе постоянного тока для осуществления торможения противовключением меняют подключение концов обмоток якоря. При этом ток в якоре и момент меняют направление.
В обоих случаях действующее напряжение становится большим, поэтому для ограничения тока и момента переключение осуществляется с одновременным включением резисторов в цепь якоря или ротора.Энергия торможения и поступающая из сети рассеивается в обмотках якоря и в резисторах.
Динамическое торможение характеризуется тем, что электрическая машина работает генератором (динамо) с рассеиванием энергии торможения в тормозных резисторах и обмотках электродвигателя.
Для динамического торможения якорь двигателя постоянного тока отключают от источника питания и включают на сопротивление, а обмотка возбуждения остается под напряжением, асинхронных двигателях динамическое торможение достигается подачей постоянного тока в обмотку статора двигателя.
Постоянный ток создает неподвижное магнитное поле. При вращении ротора в его обмотках наводится ЭДС и появляется ток. Взаимодействие тока ротора с неподвижным магнитным полем создает тормозной момент. Значение тормозного момента зависит от тока возбуждения, частоты вращения и сопротивления цепи ротора (якоря).
В режиме рекуперативного торможения ротор (якорь) подключенного к сети электродвигателя вращается со скоростью, большей ωо. В этом случае ток изменяет направление, электрическая машина становится генератором, работающим параллельно с сетью, энергия торможения за вычетом потерь отдается в электрическую сеть.
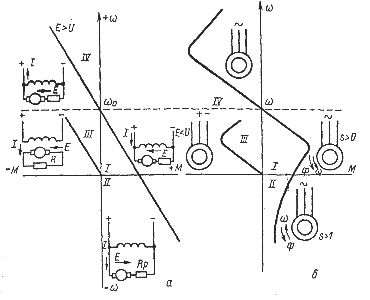
Рис. 1. Включение и механические характеристики электродвигателей: независимым возбуждением (а) и асинхронного (б) в режимах: I — двигательном, II — противовключения, III — динамического торможения, I V — генераторном с отдачей энергии в сеть.
Рекуперативное торможение используется в подъемных кранах, для удержания скорости при опускании грузов, для испытания и обкатки под нагрузкой автомобильных и тракторных двигателей, редукторов, коробок перемены передач под нагрузкой, а также во время перехода с большей скорости на меньшую в многоскоростных электродвигателях.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Схемы торможения двигателей постоянного тока
 При остановке и реверсировании двигателей постоянного тока (ДПТ) применяется электрическое (динамическое и противовключением) и механическое торможения. При динамическом торможении схема отключает обмотку якоря от сети и замыкает ее на тормозной резистор с одной или несколькими ступенями. Управление динамическим торможением производится с заданием времени или с контролем скорости.
При остановке и реверсировании двигателей постоянного тока (ДПТ) применяется электрическое (динамическое и противовключением) и механическое торможения. При динамическом торможении схема отключает обмотку якоря от сети и замыкает ее на тормозной резистор с одной или несколькими ступенями. Управление динамическим торможением производится с заданием времени или с контролем скорости.
Для управления моментом ДПТ с заданием времени в режиме динамического торможения применяется узел схемы, приведенный на рис. 1, а, составленный для управления торможением ДПТ с независимым возбуждением с одной ступенью тормозного резистора R2.
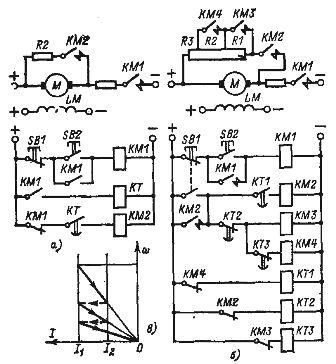
Рис. 1. Схема, осуществляющая одноступенчатое (а) и трехступенчатое (б) динамическое торможение двигателя постоянного тока с управлением по времени и пусковая диаграмма трехступенчатого торможения (в).
Команда на перевод ДПТ в режим динамического торможения в приведенной схеме подается от кнопки SB1. При этом линейный контактор КМ1 отключает якорь двигателя от напряжения сети, а тормозной контактор КМ2 подключает к нему тормозной резистор. Команду на отсчет времени процесса динамического торможения для реле торможения КТ подает линейный контакторам КМ1, выполняющий предыдущую операцию в схеме перед началом динамического торможения. В качестве тормозного реле используется электромагнитное реле времени постоянного тока.
Схема может применяться для управления ДПТ с независимым возбуждением и ДПТ с последовательным возбуждением, но в последнем случае — с реверсом тока в последовательной обмотке возбуждения.
Управление динамическим торможением с заданием времени чаще используется при многоступенчатом торможении, когда применяется несколько реле времени, подающих команды на последовательное выведение ступеней тормозного резистора (как при пуске). Узел такой схемы, составленный для ДПТ с независимым возбуждением с тремя ступенями тормозного резистора, приведен на рис. 1, б.
Последовательное включение ступеней торможения осуществляют контакторы КМ2, КМ3, КМ4, управляемые от электромагнитных реле времени КТ1, КТ2 и КТ3. Управляющая команда на начало торможения в схеме подается кнопкой SB1, которая отключает контактор КМ1 и включает КМ2.
Дальнейшая последовательность включения контакторов КМ3, КМ4 и отключения КМ2 в конце процесса торможения определяется настройкой реле торможения КТ2, КТ3 и КТ1, обеспечивающих переключения при значениях тока I1 и I2, как показано на рис. 1, в. Приведенная схема управления может применяться и для управления двигателем переменного тока в режиме динамического торможения.
При одноступенчатом динамическом торможении наибольшее распространение получило управление моментом с контролем скорости. Узел такой схемы приведен на рис. 2. Контроль скорости осуществляет реле напряжения KV, обмотка которого подключена на якорь ДПТ.
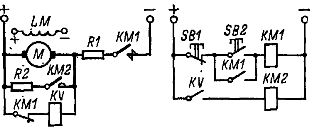
Рис. 2. Схема управления динамическим торможением двигателя постоянного тока с контролем скорости.
Это реле, отключающееся при низкой скорости, подает команду на отключение контактора КМ2 и окончание процесса торможения. Напряжение отпадания реле KV соответствует скорости, составляющей примерно 10—20 % установившегося начального значения:

Практически реле KV настраивается так, чтобы контактор торможения отключался при скорости, близкой к нулю. Так как реле торможения должно отключаться при низких значениях напряжения, то в качестве него выбирается реле напряжения с низким коэффициентом возврата типа РЭВ830.
При торможении двигателей в режиме противовключения, которое чаще всего используется в реверсивных схемах, применение управления с контролем скорости оказывается наиболее простым и надежным.
Узел управления ДПТ СВ в режиме торможения противовключением с одной ступенью тормозного резистора приведен на рис. 3. Тормозной резистор состоит из условно принятой пусковой ступени R2 и ступени противовключения R1. Управляющая команда на реверс с предварительным торможением противовключением в приведенной схеме подается от командоконтроллера SM.
Управление режимом торможения и выдача команды на его окончание производят реле противовключейния KV1 и KV2, в качестве которых используются реле напряжения типа РЭВ821 или РЭВ84. Реле настраиваются на напряжение втягивания из расчета включения его при скорости двигателя, близкой к нулю (15—20 % установившейся скорости):

где Uс — напряжение питающей сети, Rx — часть сопротивления, на которую подключается обмотка реле противовключения (KV1 или KV2), R — полное сопротивление якорной цепи.

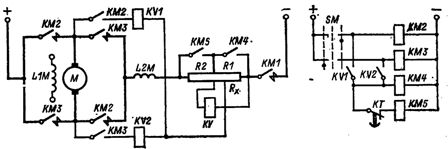
Рис. 4. Узел схемы управлении торможением противовключением двигателя постоянного тока с контролем скорости.
Точка присоединения обмоток реле к пусковому и тормозному резистору, т. е. значение Rx, находится из условия отсутствия напряжения на реле в начале торможения, когда
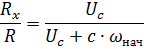
где ωнач — угловая скорость двигателя в начале торможения.
Отключенное состояние замыкающего контакта реле противовключения в процессе всего периода торможения обеспечивает наличие в якорной цепи ДПТ полного тормозного сопротивления, определяющего допустимый тормозной ток. В конце торможения реле KV1 или KV2, включаясь, подает команду на включение контактора противовключения КМ4 и разрешает начало реверсирования после окончания торможения.
При пуске двигателя реле KV1 или KV2 включается сразу после подачи управляющей команды на пуск двигателя. При этом включается контактор КМ4 и отключает ступень противовключения R1, обмотка реле ускорения КТ шунтируется. По истечении выдержки времени реле КТ замыкается его контакт в цепи катушки контактора КМ5, который, срабатывая, замыкает свой силовой контакт, шунтирующий часть пускового резистора R2, двигатель переходит на естественную характеристику.
При остановке двигателя, особенно в механизмах перемещения и подъема, применяется механическое торможение, осуществляемое колодочным электромагнитным или другим тормозом. Схема включения тормоза приведена на рис. 4. Управление тормозом обеспечивает электромагнит YB, при включении которого тормоз растормаживает двигатель, а при отключении — затормаживает. Для включения электромагнита его обмотка, имеющая обычно большую индуктивность, подключается к напряжению питания контактором с дугогашением, например КМ5.
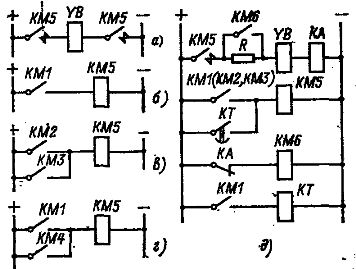
Рис. 4. Узлы схем включения электромагнитного тормоза постоянного тока.
Включается и отключается этот контактор вспомогательными контактами линейного контактора КМ1 (рис. 4, б) или контактором реверса КМ2 и КМЗ (рис. 4, в) в реверсивных схемах. Обычно механическое торможение осуществляется вместе с электрическим, но тормоз может срабатывать, например, после окончания динамического торможения или с выдержкой времени. При этом питание обмотки электромагнита УВ в период динамического торможения осуществляется контактором торможения КМ4 (рис. 4, г).
Часто электромагниты тормозов включаются с форсировкой, осуществляемой дополнительным контактором КМ6 (рис. 4,д). Отключается этот контактор токовым реле КА, которое включается при включении электромагнита тормоза YB. Настраивается реле КА на срабатывание при токе, равном номинальному току холодной обмотки электромагнита тормоза YB при ПВ = 25 %. Реле времени КТ используется для обеспечения наложения механического тормоза при остановке двигателя.
При торможении ДПТ со скорости выше основной, соответствующей ослабленному магнитному потоку, управление моментом при усилении магнитного потока осуществляется с контролем тока. Контроль тока обеспечивает токовое реле КА, осуществляющее релейную обратную связь по току якоря, как это осуществлялось при ослаблении магнитного потока. При динамическом торможении используется узел схемы, приведенный на рис. 5, а, а при торможении противовключением — узел, приведенный на рис. 5, б.
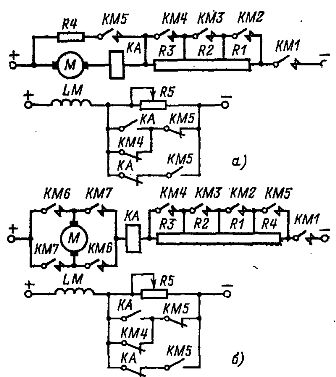
Рис. 5. Узлы схем динамического торможения (а) и противовключения (б) с усилением магнитного потока двигателя постоянного тока с управлением с контролем тока.
В схемах применены три ступени пучкового резистора (R1 — R3) и три контактора ускорения (КМ2 — КМ4), одна ступень динамического торможения и противовключения R4 и один контактор торможения (противовключения) КМ5.
Усиление магнитного потока осуществляется размыкающим контактом токового реле КА, цепь через который создается при включении контактора торможения КМ5, а цепь замыкающего контакта КА, служащего для ослабления магнитного потока при пуске, при этом разрывается размыкающим вспомогательным контактом контактора КМ5.
Реле КА в начале торможения замыкается от броска тормозного тока, а затем при спадании тока размыкается и усиливает магнитный поток, что приводит к возрастанию тока, включению реле КА и ослаблению магнитного потока. За несколько переключений реле магнитный поток усиливается до номинального значения. Далее в схемах будет происходить динамическое торможение и противовключением в соответствии с характеристиками, определяемыми резисторами R4 и R1— R4.
Реле КА настраивается так, чтобы его токи переключения были выше минимального значении тормозного тока, что важно при торможении противовключеиием.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Способы и схемы торможения электродвигателей
Торможение электродвигателя применяют, если необходимо сократить время свободного выбега и фиксацию механизма в конкретном положении. Существует несколько видов принудительной остановки устройства. Это механическое, электрическое и комбинированное. Механическое устройство представляет собой тормозной шкив, закрепленный на валу, с колодками. После отключения устройства колодки прижимаются к шкиву. За счет трения кинетическая энергия преобразуется в тепловую, т.е. происходит процесс торможения. Остальные способы и схемы торможения электрического двигателя будут рассмотрены далее в статье.
Способы электрического торможения электроприводов
Для того чтобы быстро остановить устройство или обеспечить постоянную скорость вращения используют электрические способы остановки. В зависимости от схемы включения тормозные режимы подразделяют на:
- противовключения;
- динамический;
- рекуперативный.
Противовключения
Режим противовключения применяется при необходимости быстрой остановки механизма. Представляет собой смену полярности на обмотке якоря двигателя постоянного тока или переключения двух фаз на обмотках асинхронного электродвигателя.
В этом случае ротор вращается в противоположном направлении магнитного поля статора. Вращение ротора замедляется. При скорости вращения близкой к нулю с реле контроля скорости поступает сигнал, отключая механизм от сети.
На нижеприведенном рисунке представлена схема противовключения асинхронного электромотора.

После переключения обмоток возникает повышенное действующее напряжение и увеличение тока. Для его ограничения, в обмотки ротора или статора устанавливают дополнительные резисторы. Они ограничивают токи в обмотках в режиме торможения.
Динамическая остановка электропривода
Этот способ применяют на асинхронных машинах, подключенных к сети переменного тока. Он заключается в отключении обмоток от сети переменного напряжения и подачи постоянного тока на обмотку статора.

На вышеприведенном рисунке представлена схема торможения трехфазного двигателя постоянным током.
Подача постоянного напряжения осуществляется с помощью понижающего трансформатора для динамического торможения. Пониженное переменное напряжение преобразуется в постоянное диодным мостом и подается на статорную обмотку. Для торможения электромотора может применяться дополнительный источник постоянного тока.
При этом ротор может быть выполнен в виде «беличьей клетки» или ее обмотку подключают к добавочным резисторам.
Постоянное напряжение создает неподвижный магнитный поток. При вращении ротора в нем наводится ЭДС, т.е. электромотор переходит в режим генератора. Возникающая электродвижущая сила рассевается на обмотке ротора и добавочных резисторах. Создается тормозной момент. В момент остановки механизма постоянное напряжение отключается по сигналу реле скорости.
Механизмы, где применяется электродвигатель с самовозбуждением, динамическую остановку выполняют с помощью подключения конденсаторов. Они соединяются треугольником или звездой.
Схема приведена на нижеприведенном рисунке.

На выбеге остаточная энергия магнитного поля переходит в заряд конденсаторов, а затем она питает обмотку статора. Возникающий тормозной эффект останавливает механизм. Конденсаторная батарея может быть подключена постоянно или подсоединяться в момент отключения от сети. Такая схема получила название «конденсаторное торможение асинхронного двигателя».
Если необходимо быстро остановить двигатель, то после отключения от сети, замыкают контакты накоротко без гасящих резисторов. При соединении обмоток закорачиванием в них возникают большие токи. Для уменьшения токов к обмоткам подключают токоограничивающие резисторы.
На нижеприведенном рисунке представлена схема с токоограничивающими резисторами.

Режимы торможения моторов постоянного тока
Динамическое торможение электродвигателя постоянного тока осуществляется после отключения его от сети с замыканием обмотки ротора на тормозной реостат. Выделенная электрическая энергия рассеивается на реостате.

На вышеприведенном рисунке представлены схемы реостатного торможения двигателя постоянного тока.
Рекуперативное торможение электрических машин
Рекуперативное торможение электродвигателя характеризуется переводом двигателя в генераторный режим. При этом вырабатываемая электроэнергия возвращается в сеть или используется для подзарядки аккумулятора.
Этот режим широко применяется в электровозах, электричках, трамваях и троллейбусах. В момент торможения, вырабатываемая электроэнергия возвращается в электрическую сеть.

Режим рекуперативного торможения применяется для подзарядки аккумуляторов в гибридных автомобилях, электромобилях, электросамокатах, электровелосипедах.
Этот режим является наиболее экономичным и возможен при условии: если частота вращения ротора превышает частоту вращения холостого хода. Это условие выполняется, когда ЭДС электродвигателя превышает напряжение питающей сети. А ток якоря и магнитный поток меняют свое направление. Электрическая машина переходит в генераторный режим, возникает момент торможения.

На рисунке представлена схема торможения тягового двигателя а) с независимым возбуждением и стабилизирующим сопротивлением, б) с противовозбуждением возбудителя.
Режим рекуперации в асинхронных электрических машинах
Режим рекуперации применяется не только в двигателях постоянного тока. Его можно применять и в асинхронных двигателях.
При этом такой режим возможен в следующих случаях:
- Если изменить частоту питающего напряжения при помощи частотного преобразователя. Что возможно при условии питания асинхронного электродвигателя от устройства с возможностью регулирования частоты питающей сети. Эффект торможения наступает при уменьшении частоты питающего напряжения. При этом переход в генераторный режим происходит, когда скорость вращения ротора становится больше номинальной (синхронной).
- Асинхронные машины, которые конструктивно имеют возможность переключения обмоток, для изменения скорости.
- В грузоподъёмных механизмах, где применяется силовой спуск. В них монтируется электромотор с фазным ротором. В этом случае скорость регулируется с помощью изменения величины резистора, подсоединяемого к обмоткам ротора. Магнитный поток начинает обгонять поле статора, а скольжение становится больше 1. Электромотор переходит в режим генератора, вырабатываемая электроэнергия возвращается в сеть, возникает тормозной эффект.
Комбинированный режим
Комбинированные тормозные режимы применяются в электрических машинах, если необходимо быстро остановить и зафиксировать механизм. Для этого используют механический блок торможения в комбинации с электрическим торможением. Комбинация может быть различной. Это может быть и электрическая схема с противовключением, динамическим и рекуперативным режимами.
Вот мы и рассмотрели основные способы и схемы торможения электродвигателей. Если возникнут вопросы, задавайте их в комментариях под статьей!
Источник



