
- Способы торможения электродвигателей
- Электродвигателей. 3.1. Механические характеристики сериесного электродвигателя постоянного тока и их построение
- Торможение электродвигателя
- Подписка на рассылку
- Механическое торможение
- Динамическое торможение электродвигателя
- Торможение противовключением
- Конденсаторное торможение электродвигателей
- Рекуперативное торможение
- Остановка двигателей постоянного тока (ДПТ)
- Динамическое торможение
- Торможение противовключением
Способы торможения электродвигателей
 Электродвигатели в электроприводе могут быстро остановить производственный механизм, или удержать определенную скорость при положительном моменте рабочей машины. В этом случае двигатель обращается в генератор и работает в одном из тормозных режимов : противовключения, динамическом, рекуперативном (смотрите рис. 1) в зависимости от способа возбуждения.
Электродвигатели в электроприводе могут быстро остановить производственный механизм, или удержать определенную скорость при положительном моменте рабочей машины. В этом случае двигатель обращается в генератор и работает в одном из тормозных режимов : противовключения, динамическом, рекуперативном (смотрите рис. 1) в зависимости от способа возбуждения.
Торможение электропривода посредством переключения обмоток фаз электродвигателя для получения вращения поля в противоположном направлении ( торможение противовключением ) применяют, когда необходимо быстро остановить машинное устройство. При этом по инерции ротор вращается навстречу магнитному потоку, скольжение электродвигателя становится больше единицы, а момент — отрицательным.
В двигателе постоянного тока для осуществления торможения противовключением меняют подключение концов обмоток якоря. При этом ток в якоре и момент меняют направление.
В обоих случаях действующее напряжение становится большим, поэтому для ограничения тока и момента переключение осуществляется с одновременным включением резисторов в цепь якоря или ротора.Энергия торможения и поступающая из сети рассеивается в обмотках якоря и в резисторах.
Динамическое торможение характеризуется тем, что электрическая машина работает генератором (динамо) с рассеиванием энергии торможения в тормозных резисторах и обмотках электродвигателя.
Для динамического торможения якорь двигателя постоянного тока отключают от источника питания и включают на сопротивление, а обмотка возбуждения остается под напряжением, асинхронных двигателях динамическое торможение достигается подачей постоянного тока в обмотку статора двигателя.
Постоянный ток создает неподвижное магнитное поле. При вращении ротора в его обмотках наводится ЭДС и появляется ток. Взаимодействие тока ротора с неподвижным магнитным полем создает тормозной момент. Значение тормозного момента зависит от тока возбуждения, частоты вращения и сопротивления цепи ротора (якоря).
В режиме рекуперативного торможения ротор (якорь) подключенного к сети электродвигателя вращается со скоростью, большей ωо. В этом случае ток изменяет направление, электрическая машина становится генератором, работающим параллельно с сетью, энергия торможения за вычетом потерь отдается в электрическую сеть.
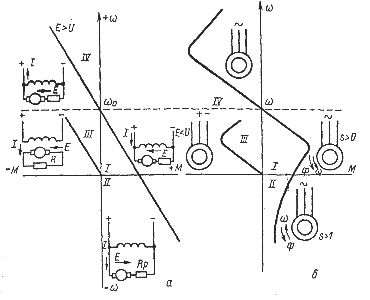
Рис. 1. Включение и механические характеристики электродвигателей: независимым возбуждением (а) и асинхронного (б) в режимах: I — двигательном, II — противовключения, III — динамического торможения, I V — генераторном с отдачей энергии в сеть.
Рекуперативное торможение используется в подъемных кранах, для удержания скорости при опускании грузов, для испытания и обкатки под нагрузкой автомобильных и тракторных двигателей, редукторов, коробок перемены передач под нагрузкой, а также во время перехода с большей скорости на меньшую в многоскоростных электродвигателях.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Электродвигателей. 3.1. Механические характеристики сериесного электродвигателя постоянного тока и их построение




![]()
![]()
3.1. Механические характеристики сериесного электродвигателя постоянного тока и их построение
3.1.1. Двигательный режим
Схема включения двигателя сериесного или последовательного возбуждения постоянного тока представлена на рис. 3.1.
Аналитическое выражение механической характеристики может быть получена из уравнения равновесия напряжений для якорной цепи схемы. При установившемся режиме работы приложенное напряжение U уравновешивается падением напряжения в якорной цепи Iя(Rя + + Rо.в + Rд.я) и наведенной в якоре ЭДС вращения Е = ωсФ, т.е.
где Iя – ток в якорной цепи;
Rя – внутреннее сопротивление якоря;
Rо.в – внутреннее сопротивление обмотки возбуждения;
Rд.я – добавочное сопротивление резистора, включенного в цепь двигателя;
ω – скорость вращения якоря;
с – коэффициент, зависящий от конструктивных данных двигателя;
Ф – магнитный поток обмотки возбуждения;
сФ – коэффициент ЭДС.
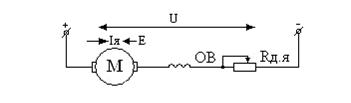
Рис. 3.1. Схема включения сериесного двигателя постоянного тока
Вращающий момент сериесного двигателя постоянного тока
где к – коэффициент, зависящий от конструктивных данных двигателя;
кФ – коэффициент момента.
В системе СИ коэффициент ЭДС равен коэффициенту момента, т.е. сФ = кФ.
Из выражения (3.1) имеем уравнение скоростной характеристики
 , (3.3)
, (3.3)
и уравнение электромеханической характеристики
 , (3.4)
, (3.4)
Магнитный поток Ф сериесного двигателя является функцией тока якоря Iя(Ф = f(Iя)) (рис. 3.2) и эта зависимость носит название кривой намагничивания. Принимается линейная зависимость между магнитным потоком Ф и током якоря Iя.
Тогда с учетом (3.5) вращающий момент двигателя Мдв = кα Iя 2 ,
 , (3.6)
, (3.6)
Так как по обмотке сериесного двигателя течет полный рабочий ток, то квадратичная зависимость Мдв от Iя сохраняется (принято считать) при нагрузке, равной 75% от номинальной и ниже. С увеличением нагрузки 75% от номинальной и выше зависимость Мдв=f(Iя) наближается к прямой линии, происходит полное насыщение стали магнитопровода.
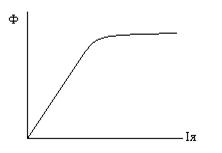
Рис. 3.2. Кривая намагничивания сериесного двигателя постоянного тока
Подставив в равенство для скорости вращения (3.3) значение тока (3.6), получим выражение для механической характеристики двигателя, то есть
 , (3.7)
, (3.7)
где  ,
,  — постоянные величины.
— постоянные величины.
Уравнение (3.7) представляет собой аналитическое выражение механической характеристики сериесного двигателя постоянного тока (рис. 3.3). Из него следует, что при ненасыщенной магнитной цепи двигателя механическая характеристика изображается кривой (гиперболой), для которой ось абсцисс – скорость вращения, является асимптотой. Как и в шунтовом двигателе механическая характеристика, соответствующая Rд.я=0, называется естественной, остальные искусственными или реостатными. Из механических характеристик видно, что сериесный двигатель снижает частоту вращения, способен принимать большие перегрузки (мягкая механическая характеристика).
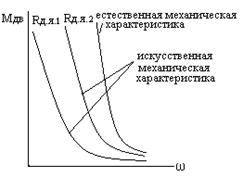
Рис. 3.3. Механическая характеристика сериесного двигателя постоянного тока
Уравнение скоростной характеристики (3.3) и вид механических характеристик (рис. 3.3) показывают, что при холостом ходе и при малых нагрузках, когда ток в якоре, а следовательно и магнитный поток невелики, сериесный двигатель идет «вразнос», то есть его скорость вращения увеличивается до недопустимых пределов.
Механические характеристики сериестного двигателя постоянного тока (характеристики имеют криволинейную линию) строят или по экспериментальным рабочим характеристикам ω = f(Iя), М = φ(Iя), η = ψ(Iя), приводимых в каталогах или пользуются универсальными характеристиками, построенными в относительных единицах и обычно даваемые в справочниках (рис 3.4). За масштаб относительных единиц тока, момента и скорости вращения приняты их номинальные значения (  ).
).
Зная каталожные величины Рн, Iн, wн можно от универсальных характеристик перейти к характеристикам в абсолютных единицах. Для построения естественной механической характеристики необходимо задаваться рядом значений тока и по универсальной каталожной кривой находить значения момента и скорости вращения. Для построения искусственных характеристик используется пропорциональная зависимость между скоростью (wи, wе) и ЭДС (Еи, Ee) при неизменном магнитном потоке, то есть при одном и том же токе якоря

 , (3.8)
, (3.8)
Откуда с учетом выражения (3.1)
 , (3.9)
, (3.9)
Задаваясь рядом значений Iя, по характеристике ω = f(Iя) находят значение ωе, подставляя в (3.9) заданное сопротивление Rд.я, определяют ωи.
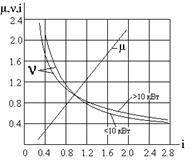
Рис. 3.4. Универсальные характеристики сериесного двигателя постоянного тока
Источник
Торможение электродвигателя
Подписка на рассылку
Производственные процессы, связанные с эксплуатацией оборудования, оснащенного электрическими двигателями переменного или постоянного тока, требуют периодической остановки. Однако после отключения питающего напряжения от электродвигателей, их роторы продолжают вращение по инерции и останавливаются только через определенный промежуток времени. Такая остановка электродвигателя называется свободным выбегом.
Для электродвигателей, работающих с частыми пусками-остановами, остановка способом свободного выбега не подходит. Чтобы сократить время, необходимое для полной остановки вращения ротора применяется принудительное торможение. Способы торможения электродвигателя подразделяются на механические и электрические.
Механическое торможение
Остановка двигателей при таком способе торможения осуществляется благодаря специальным колодкам на тормозном шкиве. После отключения питающего напряжения тормозные колодки под воздействием пружин прижимаются к шкиву. В результате возникающего трения колодок о шкив кинетическая энергия вращающегося вала преобразуется в тепловую, что и приводит к его полной остановке. После подачи напряжения электромагнит (YB) растормаживает колодки, и эксплуатация электродвигателя продолжается в штатном режиме.
В зависимости от схемы электрического торможения, кинетическая энергия вращающегося ротора может отдаваться в сеть или на батарею конденсаторов, а также преобразовываться в тепло, которое поглощается обмотками электродвигателя или специальными реостатами.
Динамическое торможение электродвигателя
Эта схема остановки подходит для трехфазных электродвигателей как с которкозамкнутым, так и с фазным ротором.
Динамическое торможение электродвигателя с короткозамкнутым ротором осуществляется посредством отключения обмоток статора от питающей сети трехфазного переменного тока и переключением двух из них через систему контакторов и реле на источник выпрямленного постоянного напряжения.
Обмотки статора после подачи на них постоянного напряжения генерируют стационарное магнитное поле, под воздействием которого в короткозамкнутой «беличьей клетке»
вращающегося ротора начинает индуцироваться электрический ток, вызывающий появление томозного момента. Направление этого момента противоположно направлению вращения останавливающегося вала. После остановки двигателя подача постоянного напряжения на обмотки статора прекращается.
В двигателях с фазным ротором величину тормозного момента можно регулировать с помощью дополнительных сопротивлений, в качестве которых используются пусковые резисторы.
Торможение противовключением
Торможение асинхронного электродвигателя методом противовключения осуществляется путем реверсирования двигателя без отключения от питающей сети.
Управление торможением выполняется реле контроля скорости. В рабочем режиме контакты реле замкнуты. После нажатия на кнопку «СТОП» (SBC) группа контакторов производит переключение двух фаз, меняя порядок их чередования. В результате этого магнитное поле статора начинает вращаться в противоположном направлении, что приводит к замедлению вращения ротора. Когда скорость вращения становится близкой к нулю, реле контроля скорости размыкает контакты и подача питающего напряжения прекращается.
Конденсаторное торможение электродвигателей
Этот способ, называемый еще торможение с самовозбуждением, применим только к электродвигателям с короткозамкнутым ротором.
После прекращения подачи питающего напряжения ротор электродвигателя продолжает вращение по инерции и генерирует в обмотках статора электрический ток, который вначале заряжает батарею конденсаторов, а после накопления номинального заряда возвращается в обмотки. Это приводит к возникновению тормозного момента, величина которого зависти от емкости конденсаторных батарей, подключенных к каждой фазе по схеме «звезда» или «треугольник». Торможение с самовозбуждением применяется на двигателях с большим числом пусков-остановов, так как величина потерь энергии в двигателях при такой схеме остановки минимальная.
Рекуперативное торможение
Рекуперативное или иначе генераторное торможение асинхронных электродвигателей на практике используется в качестве предварительного подтормаживания , а также при опускании грузов кранами всех типов или пассажирских и грузовых лифтовых кабин.
Торможение асинхронного электродвигателя в рекуперативном режиме происходит, когда номинальная частота вращения ротора превышает его синхронную частоту. Двигатель начинает генерировать электрическую энергию и отдавать ее в питающую сеть, в результате чего создается тормозящий момент. Такой способ остановки применяется для многоскоростных двигателей путем постепенного переключения с большей частоты вращения ротора на меньшую. Таким образом, в определенный момент скорость, вращающегося под воздействием инерции вала, будет больше синхронной частоты, соответствующей подключенному количеству полюсов статора. Кроме того, рекуперативная схема торможения применяется для двигателей, подключенных к преобразователям частоты. Для этого достаточно уменьшить частоту питающего напряжения.
Остановка двигателей постоянного тока (ДПТ)
Торможение электродвигателей постоянного тока осуществляется противовключением и динамическим способом.
Динамическое торможение
Такая схема торможения применяется для двигателей с независимым возбуждением.
После нажатия кнопки «Стоп» (SB1) происходит отключение обмоток якоря от питающей сети и переподключение их на тормозной резистор. В обмотках якоря, вращающегося по инерции в стационарном магнитном поле, индуцируется постоянный ток, который проходя по обмоточным проводам резистора, преобразовывается в тепловую энергию.
Торможение противовключением
Метод противовключения основан на изменении полярности напряжения, подключаемого к обмоткам индуктора или якоря двигателя. Это приводит к смене полярности магнитного потока или направлению тока, индуцируемого в якоре. Таким образом, направление вращающего момента меняется на противоположное, что вызывает появление тормозящего эффекта. Скорость вращения якоря контролируется реле скорости, которое отключает питание якоря, когда она приближается к нулевой.
Источник



