
Схемы торможения двигателей постоянного тока
 При остановке и реверсировании двигателей постоянного тока (ДПТ) применяется электрическое (динамическое и противовключением) и механическое торможения. При динамическом торможении схема отключает обмотку якоря от сети и замыкает ее на тормозной резистор с одной или несколькими ступенями. Управление динамическим торможением производится с заданием времени или с контролем скорости.
При остановке и реверсировании двигателей постоянного тока (ДПТ) применяется электрическое (динамическое и противовключением) и механическое торможения. При динамическом торможении схема отключает обмотку якоря от сети и замыкает ее на тормозной резистор с одной или несколькими ступенями. Управление динамическим торможением производится с заданием времени или с контролем скорости.
Для управления моментом ДПТ с заданием времени в режиме динамического торможения применяется узел схемы, приведенный на рис. 1, а, составленный для управления торможением ДПТ с независимым возбуждением с одной ступенью тормозного резистора R2.
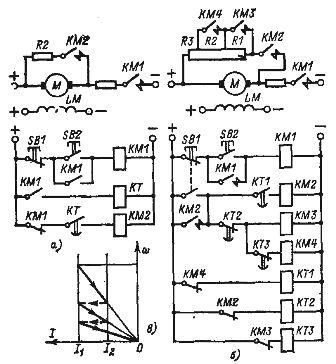
Рис. 1. Схема, осуществляющая одноступенчатое (а) и трехступенчатое (б) динамическое торможение двигателя постоянного тока с управлением по времени и пусковая диаграмма трехступенчатого торможения (в).
Команда на перевод ДПТ в режим динамического торможения в приведенной схеме подается от кнопки SB1. При этом линейный контактор КМ1 отключает якорь двигателя от напряжения сети, а тормозной контактор КМ2 подключает к нему тормозной резистор. Команду на отсчет времени процесса динамического торможения для реле торможения КТ подает линейный контакторам КМ1, выполняющий предыдущую операцию в схеме перед началом динамического торможения. В качестве тормозного реле используется электромагнитное реле времени постоянного тока.
Схема может применяться для управления ДПТ с независимым возбуждением и ДПТ с последовательным возбуждением, но в последнем случае — с реверсом тока в последовательной обмотке возбуждения.
Управление динамическим торможением с заданием времени чаще используется при многоступенчатом торможении, когда применяется несколько реле времени, подающих команды на последовательное выведение ступеней тормозного резистора (как при пуске). Узел такой схемы, составленный для ДПТ с независимым возбуждением с тремя ступенями тормозного резистора, приведен на рис. 1, б.
Последовательное включение ступеней торможения осуществляют контакторы КМ2, КМ3, КМ4, управляемые от электромагнитных реле времени КТ1, КТ2 и КТ3. Управляющая команда на начало торможения в схеме подается кнопкой SB1, которая отключает контактор КМ1 и включает КМ2.
Дальнейшая последовательность включения контакторов КМ3, КМ4 и отключения КМ2 в конце процесса торможения определяется настройкой реле торможения КТ2, КТ3 и КТ1, обеспечивающих переключения при значениях тока I1 и I2, как показано на рис. 1, в. Приведенная схема управления может применяться и для управления двигателем переменного тока в режиме динамического торможения.
При одноступенчатом динамическом торможении наибольшее распространение получило управление моментом с контролем скорости. Узел такой схемы приведен на рис. 2. Контроль скорости осуществляет реле напряжения KV, обмотка которого подключена на якорь ДПТ.
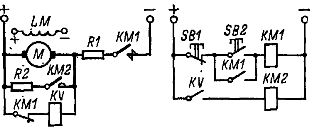
Рис. 2. Схема управления динамическим торможением двигателя постоянного тока с контролем скорости.
Это реле, отключающееся при низкой скорости, подает команду на отключение контактора КМ2 и окончание процесса торможения. Напряжение отпадания реле KV соответствует скорости, составляющей примерно 10—20 % установившегося начального значения:

Практически реле KV настраивается так, чтобы контактор торможения отключался при скорости, близкой к нулю. Так как реле торможения должно отключаться при низких значениях напряжения, то в качестве него выбирается реле напряжения с низким коэффициентом возврата типа РЭВ830.
При торможении двигателей в режиме противовключения, которое чаще всего используется в реверсивных схемах, применение управления с контролем скорости оказывается наиболее простым и надежным.
Узел управления ДПТ СВ в режиме торможения противовключением с одной ступенью тормозного резистора приведен на рис. 3. Тормозной резистор состоит из условно принятой пусковой ступени R2 и ступени противовключения R1. Управляющая команда на реверс с предварительным торможением противовключением в приведенной схеме подается от командоконтроллера SM.
Управление режимом торможения и выдача команды на его окончание производят реле противовключейния KV1 и KV2, в качестве которых используются реле напряжения типа РЭВ821 или РЭВ84. Реле настраиваются на напряжение втягивания из расчета включения его при скорости двигателя, близкой к нулю (15—20 % установившейся скорости):

где Uс — напряжение питающей сети, Rx — часть сопротивления, на которую подключается обмотка реле противовключения (KV1 или KV2), R — полное сопротивление якорной цепи.

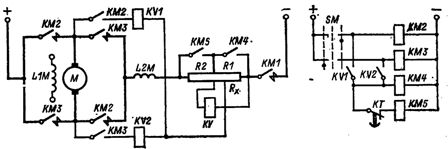
Рис. 4. Узел схемы управлении торможением противовключением двигателя постоянного тока с контролем скорости.
Точка присоединения обмоток реле к пусковому и тормозному резистору, т. е. значение Rx, находится из условия отсутствия напряжения на реле в начале торможения, когда
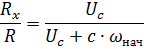
где ωнач — угловая скорость двигателя в начале торможения.
Отключенное состояние замыкающего контакта реле противовключения в процессе всего периода торможения обеспечивает наличие в якорной цепи ДПТ полного тормозного сопротивления, определяющего допустимый тормозной ток. В конце торможения реле KV1 или KV2, включаясь, подает команду на включение контактора противовключения КМ4 и разрешает начало реверсирования после окончания торможения.
При пуске двигателя реле KV1 или KV2 включается сразу после подачи управляющей команды на пуск двигателя. При этом включается контактор КМ4 и отключает ступень противовключения R1, обмотка реле ускорения КТ шунтируется. По истечении выдержки времени реле КТ замыкается его контакт в цепи катушки контактора КМ5, который, срабатывая, замыкает свой силовой контакт, шунтирующий часть пускового резистора R2, двигатель переходит на естественную характеристику.
При остановке двигателя, особенно в механизмах перемещения и подъема, применяется механическое торможение, осуществляемое колодочным электромагнитным или другим тормозом. Схема включения тормоза приведена на рис. 4. Управление тормозом обеспечивает электромагнит YB, при включении которого тормоз растормаживает двигатель, а при отключении — затормаживает. Для включения электромагнита его обмотка, имеющая обычно большую индуктивность, подключается к напряжению питания контактором с дугогашением, например КМ5.
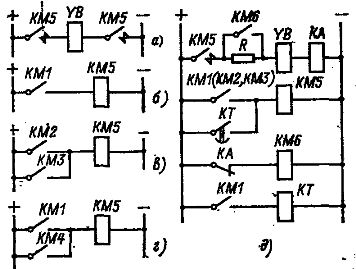
Рис. 4. Узлы схем включения электромагнитного тормоза постоянного тока.
Включается и отключается этот контактор вспомогательными контактами линейного контактора КМ1 (рис. 4, б) или контактором реверса КМ2 и КМЗ (рис. 4, в) в реверсивных схемах. Обычно механическое торможение осуществляется вместе с электрическим, но тормоз может срабатывать, например, после окончания динамического торможения или с выдержкой времени. При этом питание обмотки электромагнита УВ в период динамического торможения осуществляется контактором торможения КМ4 (рис. 4, г).
Часто электромагниты тормозов включаются с форсировкой, осуществляемой дополнительным контактором КМ6 (рис. 4,д). Отключается этот контактор токовым реле КА, которое включается при включении электромагнита тормоза YB. Настраивается реле КА на срабатывание при токе, равном номинальному току холодной обмотки электромагнита тормоза YB при ПВ = 25 %. Реле времени КТ используется для обеспечения наложения механического тормоза при остановке двигателя.
При торможении ДПТ со скорости выше основной, соответствующей ослабленному магнитному потоку, управление моментом при усилении магнитного потока осуществляется с контролем тока. Контроль тока обеспечивает токовое реле КА, осуществляющее релейную обратную связь по току якоря, как это осуществлялось при ослаблении магнитного потока. При динамическом торможении используется узел схемы, приведенный на рис. 5, а, а при торможении противовключением — узел, приведенный на рис. 5, б.
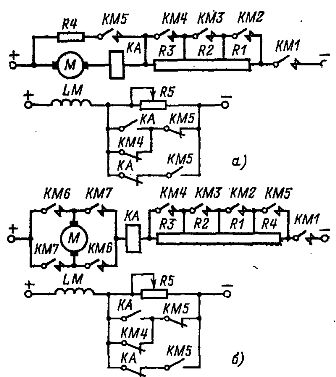
Рис. 5. Узлы схем динамического торможения (а) и противовключения (б) с усилением магнитного потока двигателя постоянного тока с управлением с контролем тока.
В схемах применены три ступени пучкового резистора (R1 — R3) и три контактора ускорения (КМ2 — КМ4), одна ступень динамического торможения и противовключения R4 и один контактор торможения (противовключения) КМ5.
Усиление магнитного потока осуществляется размыкающим контактом токового реле КА, цепь через который создается при включении контактора торможения КМ5, а цепь замыкающего контакта КА, служащего для ослабления магнитного потока при пуске, при этом разрывается размыкающим вспомогательным контактом контактора КМ5.
Реле КА в начале торможения замыкается от броска тормозного тока, а затем при спадании тока размыкается и усиливает магнитный поток, что приводит к возрастанию тока, включению реле КА и ослаблению магнитного потока. За несколько переключений реле магнитный поток усиливается до номинального значения. Далее в схемах будет происходить динамическое торможение и противовключением в соответствии с характеристиками, определяемыми резисторами R4 и R1— R4.
Реле КА настраивается так, чтобы его токи переключения были выше минимального значении тормозного тока, что важно при торможении противовключеиием.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Тормозные режимы двигателя постоянного тока с независимым возбуждением. Механические характеристики ДПТ с НВ в тормозных режимах
Кроме двигательных режимов электродвигатели также могут работать в тормозных режимах. Тормозной режим характеризуется тем, что скорость вращения и момент двигателя имеют разные знаки. Быстрота и точность, с какой будут протекать переходные процессы остановки или реверса во многом определяют производительность механизма, а иногда и качество вырабатываемого продукта. Возможны три варианта электрического торможения:
1) рекуперативное торможение;
2) динамическое торможение;
3) торможение противовключением.
Каждый тормозной режим является генераторным, так как энергия поступает в машину с вала, преобразуется в электрическую и либо отдаётся в сеть, либо затрачивается на нагрев элементов якорной цепи, обладающих активным сопротивлением, и рассеивается в окружающую среду.
3.5.1. Рекуперативное торможение
Такой режим возникает, когда скорость двигателя больше скорость идеального холостого хода двигателя, то есть выполняется условие
 .
.
При этом ЭДС двигателя становится больше напряжения сети (  ), и ток двигателя меняет направление. При этом двигатель работает генератором и отдает энергию в сеть. Электромагнитный момент двигателя при этом противодействует внешнему вращающему моменту.
), и ток двигателя меняет направление. При этом двигатель работает генератором и отдает энергию в сеть. Электромагнитный момент двигателя при этом противодействует внешнему вращающему моменту.
Данный вид торможения является наиболее экономичным, так как энергия возвращается в сеть. Применение этого способа является эффективным энергосберегающим средством. Этот режим целесообразен, когда привод работает с частыми пусками и остановками. Например, электротранспорт. При движении под уклон также возникают благоприятные условия для возникновения этого режима торможения.
Схема включения двигателя для данного режима показана на рис. 3.6, а, а характеристики представлены на рис. 3.7 (характеристика 1).
3.5.2. Динамическое торможение
Необходимость в таком торможении возникает, когда после отключения двигателя от сети его якорь продолжает вращаться под действием запаса кинетической энергии. Если по технологии требуется более быстрый останов двигателя, чем время остановки на выбеге, используется динамическое торможение.
При данном способе торможения якорь двигателя замыкается на тормозное сопротивление, а обмотка возбуждения остаётся подключенной в сеть для создания тормозного момента. Вырабатываемая при этом энергия переходит в тепловую и рассеивается в окружающее пространство. В этом режиме ток двигателя меняет знак, так как он начинает протекать под действием ЭДС двигателя, которая направлена всегда встречно напряжению сети
 .
.
Величину тормозного сопротивления можно определить из формулы
 .
.
При этом слишком малое значение тормозного момента ведет к затягивания процесса торможения, а слишком большой ток отрицательно сказывается на работе щеточно-коллекторного аппарата двигателя.
Схема включения двигателя для данного режима показана на рис. 3.6, б, а характеристики на рис. 3.7 (характеристика 2).
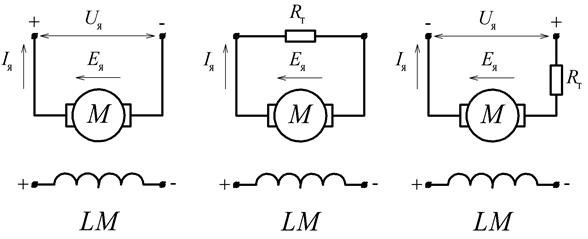 | ||
| а | б | в |
| Рис. 3.6. Схемы включения двигателя в тормозных режимах работы (а-рекуперативное, б-динамическое, в-противовключение) |
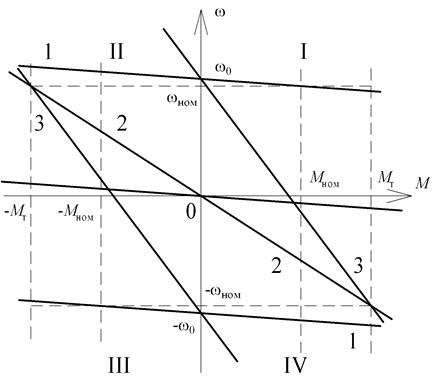 |
| Рис. 3.7. Механические характеристики ДПТ с НВ в тормозных режимах |
3.5.3. Торможение противовключением
Для уменьшения времени торможения или реверса иногда применяют данный режим. Реализация этого режима возможна на работающем двигателе при смене полярности питающего напряжения. В этом случае направления ЭДС двигателя и напряжения сети совпадает
 ,
,
что без ограничения тока якоря приводит к большим величинам тока якоря, что является недопустимым.
Величина тормозного сопротивления выбирается по формуле
 .
.
Торможение противовключением применяется в основном для реверса двигателя. Для точного останова двигателя данным режим не удобен, так как требуется довольно точная настройка аппаратуры для того, чтобы остановить двигатель в точке нулевой скорости. Если же двигатель не отключить от сети, то он перейдет в двигательный режим, и в дальнейшем разгонится до номинальной скорости при наличии номинального момента на валу двигателя. Для точной остановки двигателя используется режим динамического торможения.
Схема включения двигателя для данного режима показана на рис. 3.6, в, а характеристики на рис. 3.7 (характеристика 3).
Дата добавления: 2016-12-26 ; просмотров: 4300 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Источник



