
Тормозные режимы работы двигателя с параллельным возбуждением
 Тормозной режим работы двигателя в электроприводе применяется наравне с двигательным. Использование электродвигателя в качестве электрического тормоза широко применяется на практике для сокращения времени остановки и реверса, уменьшения скорости вращения, предотвращения чрезмерного увеличения скорости движения и в ряде других случаев.
Тормозной режим работы двигателя в электроприводе применяется наравне с двигательным. Использование электродвигателя в качестве электрического тормоза широко применяется на практике для сокращения времени остановки и реверса, уменьшения скорости вращения, предотвращения чрезмерного увеличения скорости движения и в ряде других случаев.
Работа электродвигателя в качестве электрического тормоза основана на принципе обратимости электрических машин, то есть электродвигатель при определенных условиях переходит в генераторный режим.
Практически для торможения применяются три режима:
1) генераторный (рекуперативный) с отдачей энергии в сеть,
При построении механических характеристик в системе прямоугольных координат важное значение имеет определение знаков момента и скорости вращения двигателя в двигательном и тормозных режимах. Для этого двигательный режим принимают условно за основной, считая скорость вращения и момент двигателя в этом режиме положительными. В связи с этим характеристики n = f (М) двигательного режима располагаются в первом квадранте (рис. 1 ). Расположение механических характеристик в тормозных режимах зависит от знаков момента и скорости вращения.
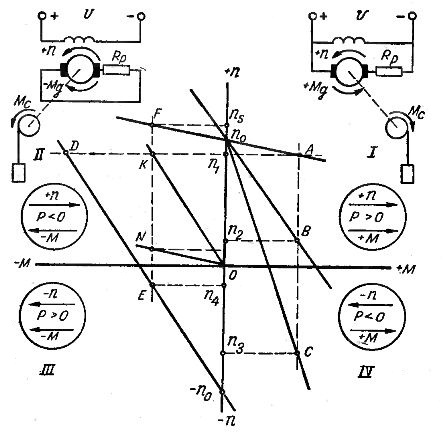
Рис. 1 . Схемы включения и механические характеристики двигателя с параллельным возбуждением в двигательном и тормозных режимах.
Рассмотрим эти режимы и соответствующие им участки механических характеристик двигателя с параллельным возбуждением.
Состояние электропривода определяется совместным действием момента двигателя Мд и статического момента нагрузки Мс. Например, установившаяся скорость вращения n1 при подъеме груза лебедкой соответствует работе двигателя на естественной характеристике (рис. 1 точка А), когда Мд = Мс. Если в цепь якоря двигателя ввести добавочное сопротивление, то скорость вращения снизится вследствие перехода на реостатную характеристику (точка В, соответствующая скорости n 2 и Мд = Мс).
Дальнейшее постепенное увеличение добавочного сопротивления в цепи якоря двигателя (например, до величины, отвечающей участку n 0 С характеристики) приведет вначале к прекращению подъема груза, а затем к изменению направления вращения, то есть груз будет опускаться (точка С). Такой режим называют противовключением .
В режиме противовключения момент Мд имеет положительный знак. Знак скорости вращения изменился и стал отрицательным. Следовательно, механические характеристики режима противовключения располагаются в четвертом квадранте, а сам режим является генераторным. Это вытекает из принятого условия определения знаков момента и скорости вращения.
Действительно, механическая мощность, пропорциональная произведению n и М, в двигательном режиме имеет положительный знак и направлена от двигателя к рабочей машине. В режиме противовключения вследствие отрицательного знака n и положительного знака М их произведение будет отрицательным, следовательно, механическая мощность передается в обратном направлении — от рабочей машины к двигателю (генераторный режим). На рис. 1 знаки n и М в двигательном и тормозных режимах показаны в кружках, стрелками.
Участки механической характеристики, соответствующие режиму противовключения, являются естественным продолжением характеристик двигательного режима из первого в четвертый квадрант.
Из рассмотренного примера перехода двигателя в режим противовключения видно, что э. д. с. двигателя, зависящая от скорости вращения, одновременно с последней при переходе через нулевое значение изменяет знак и действует согласно с напряжением сети: U = ( — Е)+ I я R я, откуда I я = (U+ Е )/R
Для ограничения тока в цепь якоря двигателя включают значительное по величине сопротивление, обычно равное двукратному пусковому. Особенность режима противовключения состоит в том, что к двигателю подводится механическая мощность со стороны вала и электрическая мощность из сети, и вся она расходуется на нагревание цепи якоря: Рм + Рэ = Е I + UI = I 2 (R и + I доб)
Режим противовключения может быть получен и путем переключения обмоток на обратное направление вращения , в то время, как якорь продолжает вращаться в прежнем направлении за счет запаса кинетической энергии (например, при остановке машины с реактивным статическим моментом — вентилятора).
В соответствии с принятым условием учета знаков n и М по двигательному режиму, при переключении двигателя на обратное вращение следует изменить положительные направления координатных осей, то есть двигательный режим теперь окажется в третьем квадранте, а противовключение — во втором.
Таким образом, если двигатель работал в двигательном режиме в точке А, то в момент переключения, когда скорость еще не успела измениться, он окажется на новой характеристике, во втором квадранте в точке D. Торможение будет происходить вниз по характеристике DE ( -n0 ), и если двигатель не отключить при скорости т = 0, он будет работать на этой характеристике в точке Е, вращая машину (вентилятор) в обратном направлении со скоростью — n 4.

Электродинамический режим торможения
Электродинамическое торможение получают путем отключения якоря двигателя от сети и включения его на отдельное внешнее сопротивление (рис. 1 , второй квадрант). Очевидно, что этот режим мало отличается от работы генератора постоянного тока с независимым возбуждением. Работа на естественной характеристике (прямая N 0) соответствует режиму короткого замыкания, из-за больших токов торможение в этом случае возможно только при малых скоростях.
В режиме электродинамического торможения якорь отключен от U сети, следовательно: U = 0; ω0 = U/c = 0
Уравнение механической характеристики имеет вид: ω = (-RM)/c 2 или ω = ( -R я + R доб/9,55се 2 )М
Механические характеристики электродинамического торможения проходят через начало координат, а это значит, что с уменьшением скорости тормозной момент двигателя уменьшается.
Наклон характеристик определяется так же, как и в двигательном режиме, величиной сопротивления в цепи якоря. Электродинамическое торможение экономичнее противовключения, так как энергия, потребляемая двигателем из сети, расходуется только на возбуждение.
Величина тока якоря, а следовательно, и тормозного момента зависит от скорости вращения и сопротивления цепи якоря: I = — Е /R = -с ω/ R
Генераторный режим с отдачей энергии в сеть
Такой режим возможен только в случае, когда направление действия статического момента совпадает с моментом двигателя. Под действием двух моментов — момента двигателя и момента рабочей машины — скорость вращения привода и э. д. с. двигателя начнут возрастать, в результате будет уменьшаться ток и момент двигателя: I = (U — Е ) / R = (U — с ω ) / R
Дальнейшее увеличение скорости вначале приводит к режиму идеального холостого хода, когда U = Е, I = 0 и n = n0 , а затем, когда э. д. с. двигателя станет больше приложенного напряжения, двигатель перейдет в генераторный режим, то есть начнет отдавать энергию в сеть.
Механические характеристики в этом режиме являются естественным продолжением характеристик двигательного режима и располагаются во втором квадранте. Направление скорости вращения не изменилось, и она осталась по-прежнему положительной, а момент имеет отрицательный знак. В уравнении механической характеристики генераторного режима с отдачей энергии в сеть изменится знак момента, следовательно, оно будет иметь вид: ω = ω о + ( R/c 2 )M или ω = ω о + ( R/ 9,55 c е 3 )M
Практически генераторный режим торможения применяют только при больших скоростях в приводах с потенциальными статическими моментами, например при опускании груза с большой скоростью.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Пуск, реверсирование и торможение двигателей постоянного тока
 Пуск двигателя постоянного тока прямым включением его на напряжение сети допустим только для двигателей небольшой мощности. При этом пик тока в начале пуска может быть порядка 4 — 6-кратного номинального. Прямой пуск двигателей постоянного тока значительной мощности совершенно недопустим, потому что начальный пик тока здесь будет равен 15 — 50-кратному номинальному. Поэтому пуск двигателей средних и больших мощностей производят при помощи пускового реостата, который ограничивает ток при пуске до допустимых по коммутации и механической прочности значений.
Пуск двигателя постоянного тока прямым включением его на напряжение сети допустим только для двигателей небольшой мощности. При этом пик тока в начале пуска может быть порядка 4 — 6-кратного номинального. Прямой пуск двигателей постоянного тока значительной мощности совершенно недопустим, потому что начальный пик тока здесь будет равен 15 — 50-кратному номинальному. Поэтому пуск двигателей средних и больших мощностей производят при помощи пускового реостата, который ограничивает ток при пуске до допустимых по коммутации и механической прочности значений.
Пусковой реостат выполняется из провода или ленты с высоким удельным сопротивлением, разделенных на секции. Провода присоединяются к медным кнопочным или плоским контактам в местах перехода от одной секции к другой. По контактам перемещается медная щетка поворотного рычага реостата. Реостаты могут иметь и другое выполнение. Ток возбуждения при пуске двигателя с параллельным возбуждением устанавливается соответствующим нормальной работе, цепь возбуждения включается прямо на напряжение сети, чтобы не было уменьшения напряжения, обусловленного падением напряжения в реостате (см. рис. 1).
Необходимость иметь нормальный ток возбуждения связана с тем, что при пуске двигатель должен развивать возможно больший допустимый момент Мэм, необходимый для обеспечения быстрого разгона. Пуск двигателя постоянного тока производится при последовательном уменьшении сопротивления реостата, обычно — путем перевода рычага реостата с одного неподвижного контакта реостата на другой и выключения секций; уменьшение сопротивления может производиться и путем замыкания накоротко секций контакторами, срабатывающими по заданной программе.
При пуске вручную или автоматически ток изменяется от максимального значения, равного 1,8 —2,5-кратному номинальному в начале работы при данном сопротивлении реостата, до минимального значения, равного 1,1 — 1,5-кратному номинальному в конце работы и перед переключением на другое положение пускового реостата. Ток якоря после включения двигателя при сопротивлении реостата rп составляет
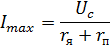
где Uс — напряжение сети.
После включения начинается разгон двигателя, при этом возникает противо-ЭДС Е и уменьшается ток якоря. Если учесть, что механические характеристики n = f1(M н) и n = f2 (I я ) практически линейны, то при разгоне увеличение скорости вращения будет происходить по линейному закону в зависимости от тока якоря (рис. 1).
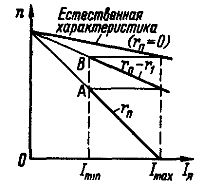
Рис. 1. Диаграмма пуска двигателя постоянного тока
Пусковая диаграмма (рис. 1) для различных сопротивлений в цепи якоря представляет собой отрезки линейных механических характеристик. При уменьшении тока якоря IЯ до значения Imin выключается секция реостата с сопротивлением r1 и ток возрастает до значения
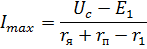
где E1 — ЭДС в точке А характеристики; r1—сопротивление выключаемой секции.
Затем снова происходит разгон двигателя до точки В, и так далее вплоть до выхода на естественную характеристику, когда двигатель будет включен прямо на напряжение Uc. Пусковые реостаты рассчитаны по нагреву на 4 —6 пусков подряд, поэтому нужно следить, чтобы в конце пуска пусковой реостат был полностью выведен.
При остановке двигатель отключается от источника энергии, а пусковой реостат полностью включается — двигатель готов к следующему пуску. Для устранения возможности появления больших ЭДС самоиндукции при разрыве цепи возбуждения и при ее отключении цепь может замыкаться на разрядное сопротивление.
В регулируемых приводах пуск двигателей постоянного тока производится путем постепенного повышения напряжения источника питания так, чтобы ток при пуске поддерживался в требуемых пределах или сохранялся в течение большей части времени пуска примерно неизменным. Последнее можно осуществить путем автоматического управления процессом изменения напряжения источника питания в системах с обратными связями.
Пуск двигателей постоянного тока с последовательным возбуждением производится также при помощи пусковых устройств. Пусковая диаграмма представляет собой отрезки нелинейной механической характеристики для различных сопротивлений цепи якоря. Пуск при относительно небольших мощностях может выполняться вручную, а при больших — путем замыкания накоротко секций пускового реостата контакторами, которые срабатывают при управлении вручную или автоматически.
Реверсирование — изменение направления вращения двигателя — производится путем изменения направления действия вращающего момента. Для этого требуется изменить направление магнитного потока двигателя постоянного тока, т. е. переключить обмотку возбуждения или якорь, при этом в якоре будет протекать ток другого направления. При переключении и цепи возбуждения, и якоря направление вращения останется прежним.
Обмотка возбуждения двигателя параллельного возбуждения имеет значительный запас энергии: постоянная времени обмотки составляет секунды для двигателей больших мощностей. Значительно меньше постоянная времени обмотки якоря. Поэтому для того чтобы реверсирование проходило возможно быстрее, производится переключение якоря. Только там, где не требуется быстродействия, можно выполнять реверсирование путем переключения цепи возбуждения.
Реверсирование двигателей последовательного возбуждения можно производить переключением или обмотки возбуждения, или обмотки якоря, так как запасы энергии в обмотках возбуждения и якоря невелики и их постоянные времени относительно малы.
При реверсировании двигателя с параллельным возбуждением якорь сперва отключается от источника питания и двигатель механически тормозится или переключается для торможения. После окончания торможения якорь переключается, если он не был переключен в процессе торможения, и выполняется пуск при другом направлении вращения.
В такой же последовательности производится и реверсирование двигателя последовательного возбуждения: отключение — торможение — переключение — пуск в другом направлении. У двигателей со смешанным возбуждением при реверсировании следует переключить якорь либо последовательную обмотку вместе с параллельной.
Торможение необходимо для того, чтобы уменьшить время выбега двигателей, которое при отсутствии торможения может быть недопустимо велико, а также для фиксации приводимых механизмов в определенном положении. Механическое торможение двигателей постоянного тока обычно производится при наложении тормозных колодок на тормозной шкив. Недостатком механических тормозов является то, что тормозной момент и время торможения зависят от случайных факторов: попадания масла или влаги на тормозной шкив и других. Поэтому такое торможение применяется, когда не ограничены время и тормозной путь.
В ряде случаев после предварительного электрического торможения при малой скорости можно достаточно точно произвести остановку механизма (например, подъемника) в заданном положении и зафиксировать его положение в определенном месте. Такое торможение применяется и в аварийных случаях.
Электрическое торможение обеспечивает достаточно точное получение требуемого тормозящего момента, но не может обеспечить фиксацию механизма в заданном месте. Поэтому электрическое торможение при необходимости дополняется механическим, которое входит в действие после окончания электрического.
Электрическое торможение происходит, когда ток протекает согласно с ЭДС двигателя. Возможны три способа торможения.
Торможение двигателей постоянного тока с возвратом энергии в сеть. При этом ЭДС Е должна быть больше напряжения источника питания UС и ток будет протекать в направлении ЭДС, являясь током генераторного режима. Запасенная кинетическая энергия будет преобразовываться в электрическую и частично возвращаться в сеть. Схема включения показана на рис. 2, а.
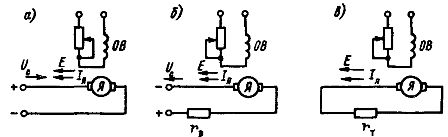
Рис. 2. Схемы электрического торможения двигателей постоянного тока: я — с возвратом энергии в сеть; б — при противовключении; в — динамическое торможение
Торможение двигателя постоянного тока может быть выполнено, когда уменьшается напряжение источника питания так, что Uc
Торможение при противовключении выполняется путем переключения вращающегося двигателя на обратное направление вращения. При этом ЭДС Е и напряжение Uc в якоре складываются, и для ограничения тока I следует включать резистор с начальным сопротивлением

где Imах — наибольший допустимый ток.
Торможение связано с большими потерями энергии.
Динамическое торможение двигателей постоянного тока выполняется при включении на зажимы вращающегося возбужденного двигателя резистора rт (рис. 2, в). Запасенная кинетическая энергия преобразуется в электрическую и рассеивается в цепи якоря как тепловая. Это наиболее распространенный способ торможения.

Схемы включения двигателя постоянного тока параллельного (независимого) возбуждения: а — схема включения двигателя, б — схема включения при динамическом торможении, в — схема для противовключения.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник



