
- Тормозные режимы двигателя постоянного тока с независимым возбуждением. Механические характеристики ДПТ с НВ в тормозных режимах
- Пуск и тормозные режимы двигателя постоянного тока независимого возбуждения ДПТ НВ
- Графический метод расчета пусковых реостатов
- Аналитический метод расчета пусковых реостатов
- Тормозные режимы двигателей постоянного тока независимого возбуждения дпт нв
- Генераторное рекуперативное торможение
- Динамическое торможение.
- Торможение противовключением.
- Торможение двигателей постоянного тока
Тормозные режимы двигателя постоянного тока с независимым возбуждением. Механические характеристики ДПТ с НВ в тормозных режимах
Кроме двигательных режимов электродвигатели также могут работать в тормозных режимах. Тормозной режим характеризуется тем, что скорость вращения и момент двигателя имеют разные знаки. Быстрота и точность, с какой будут протекать переходные процессы остановки или реверса во многом определяют производительность механизма, а иногда и качество вырабатываемого продукта. Возможны три варианта электрического торможения:
1) рекуперативное торможение;
2) динамическое торможение;
3) торможение противовключением.
Каждый тормозной режим является генераторным, так как энергия поступает в машину с вала, преобразуется в электрическую и либо отдаётся в сеть, либо затрачивается на нагрев элементов якорной цепи, обладающих активным сопротивлением, и рассеивается в окружающую среду.
3.5.1. Рекуперативное торможение
Такой режим возникает, когда скорость двигателя больше скорость идеального холостого хода двигателя, то есть выполняется условие
 .
.
При этом ЭДС двигателя становится больше напряжения сети (  ), и ток двигателя меняет направление. При этом двигатель работает генератором и отдает энергию в сеть. Электромагнитный момент двигателя при этом противодействует внешнему вращающему моменту.
), и ток двигателя меняет направление. При этом двигатель работает генератором и отдает энергию в сеть. Электромагнитный момент двигателя при этом противодействует внешнему вращающему моменту.
Данный вид торможения является наиболее экономичным, так как энергия возвращается в сеть. Применение этого способа является эффективным энергосберегающим средством. Этот режим целесообразен, когда привод работает с частыми пусками и остановками. Например, электротранспорт. При движении под уклон также возникают благоприятные условия для возникновения этого режима торможения.
Схема включения двигателя для данного режима показана на рис. 3.6, а, а характеристики представлены на рис. 3.7 (характеристика 1).
3.5.2. Динамическое торможение
Необходимость в таком торможении возникает, когда после отключения двигателя от сети его якорь продолжает вращаться под действием запаса кинетической энергии. Если по технологии требуется более быстрый останов двигателя, чем время остановки на выбеге, используется динамическое торможение.
При данном способе торможения якорь двигателя замыкается на тормозное сопротивление, а обмотка возбуждения остаётся подключенной в сеть для создания тормозного момента. Вырабатываемая при этом энергия переходит в тепловую и рассеивается в окружающее пространство. В этом режиме ток двигателя меняет знак, так как он начинает протекать под действием ЭДС двигателя, которая направлена всегда встречно напряжению сети
 .
.
Величину тормозного сопротивления можно определить из формулы
 .
.
При этом слишком малое значение тормозного момента ведет к затягивания процесса торможения, а слишком большой ток отрицательно сказывается на работе щеточно-коллекторного аппарата двигателя.
Схема включения двигателя для данного режима показана на рис. 3.6, б, а характеристики на рис. 3.7 (характеристика 2).
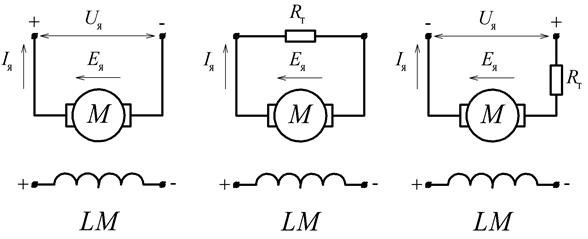 | ||
| а | б | в |
| Рис. 3.6. Схемы включения двигателя в тормозных режимах работы (а-рекуперативное, б-динамическое, в-противовключение) |
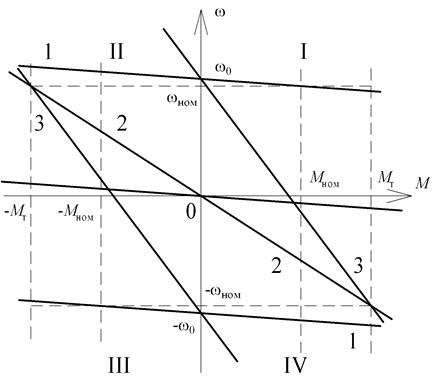 |
| Рис. 3.7. Механические характеристики ДПТ с НВ в тормозных режимах |
3.5.3. Торможение противовключением
Для уменьшения времени торможения или реверса иногда применяют данный режим. Реализация этого режима возможна на работающем двигателе при смене полярности питающего напряжения. В этом случае направления ЭДС двигателя и напряжения сети совпадает
 ,
,
что без ограничения тока якоря приводит к большим величинам тока якоря, что является недопустимым.
Величина тормозного сопротивления выбирается по формуле
 .
.
Торможение противовключением применяется в основном для реверса двигателя. Для точного останова двигателя данным режим не удобен, так как требуется довольно точная настройка аппаратуры для того, чтобы остановить двигатель в точке нулевой скорости. Если же двигатель не отключить от сети, то он перейдет в двигательный режим, и в дальнейшем разгонится до номинальной скорости при наличии номинального момента на валу двигателя. Для точной остановки двигателя используется режим динамического торможения.
Схема включения двигателя для данного режима показана на рис. 3.6, в, а характеристики на рис. 3.7 (характеристика 3).
Дата добавления: 2016-12-26 ; просмотров: 4303 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Источник
Пуск и тормозные режимы двигателя постоянного тока независимого возбуждения ДПТ НВ

Ответственным моментом при эксплуатации двигателей постоянного тока является их пуск. При включении двигателя в сеть в начальный момент ток в цепи якоря ограничивается лишь электрическим сопротивлением цепи якоря, так как в неподвижном якоре ЭДС не индуцируется. Поэтому начальный пусковой ток при непосредственном включении двигателя в сеть может достигать опасных значений, способных нарушить работу щеточно- коллекторного узла и вызвать «круговой огонь» на коллекторе. Кроме того, такой ток создаст чрезмерно большой пусковой момент, оказывающий на вращающиеся части электропривода ударное воздействие, способное вызвать их механическое разрушение. Эффективным средством ограничения пускового тока в двигателях постоянного тока является применение пусковых реостатов. Существует два метода расчета пусковых реостатов: графический и аналитический.
Графический метод расчета пусковых реостатов
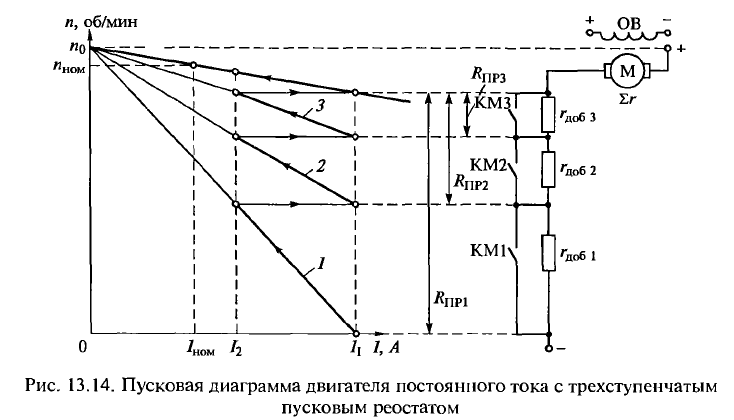
В основе графического метода лежит пусковая диаграмма двигателя. Пусковая диаграмма, представленная на рис. 13.14, совмещена с трехступенчатым пусковым реостатом; K1, К2 и КЗ являются контактами силовых контакторов, посредством которых осуществляется переключение ступеней реостата, а rдоб1, rдоб2 и rдоб3 — резисторы ступеней пускового реостата. Механические характеристики 1, 2, 3 соответствуют ступеням пускового реостата RПР1, RПР2 и RПР3. Значения начального пускового тока I1 и тока переключений реостатов I2 обычно принимают
при этом ток переключений I2 должен быть не меньше тока нагрузки, соответствующего статическому моменту сопротивления нагрузки МС, на вал двигателя. Для двигателей специального назначения, с тяжелыми условиями работы, например двигателей краново-металлургических серий, указанные значения токов могут быть увеличены.
Аналитический метод расчета пусковых реостатов
При аналитическом методе расчет сопротивлений резисторов пускового реостата ведут по формулам:
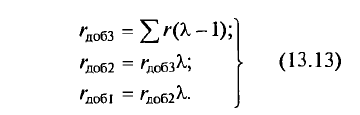
В этих выражениях λ = I1/I2 представляет собой отношение начального пускового тока I1 к току переключений I2. При работе двигателя от регулируемого преобразователя напряжения необходимость в пусковом реостате отпадает, так как пуск двигателя можно начинать с любого пониженного значения напряжения на обмотке якоря в соответствии с допустимым значением начального пускового тока.
Тормозные режимы двигателей постоянного тока независимого возбуждения дпт нв
Помимо основного (двигательного) режима работы в двигателях постоянного тока независимого (параллельного) возбуждения возможны тормозные режимы.
Генераторное рекуперативное торможение
Этот режим наступает, когда частота вращения якоря превышает частоту вращения холостого хода n0.
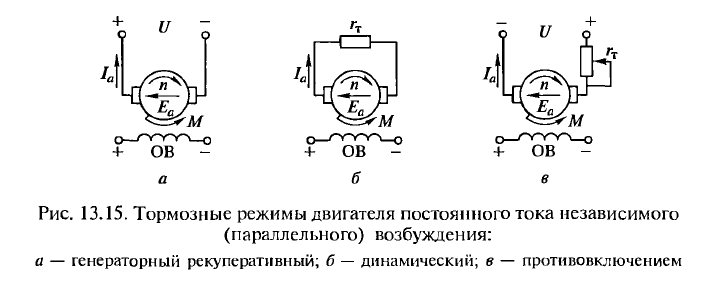
В этих условиях ЭДС машины Еа = сеФn0 превышает напряжение питающей сети (Еа > Uном), при этом ток якоря, а следовательно, и электромагнитный момент меняют свое направление на противоположное. В итоге машина постоянного тока переходит в генераторный режим и вырабатываемую при этом электроэнергию отдает в сеть. Электромагнитный момент двигателя становится тормозящим и противодействует внешнему вращающему моменту, создаваемому силами инерции вращающего с прежней скоростью якоря (рис. 13.15, а). Этот процесс торможения будет продолжаться до тех пор, пока частота вращения якоря, уменьшаясь, не достигнет значения n0.
Таким образом, для перехода двигателя в режим генераторного рекуперативного торможения не требуется изменений в схеме включения двигателя.
Генераторное рекуперативное торможение — наиболее экономичный вид торможения, так как он сопровождается возвратом энергии в сеть. Применение этого способа торможения является эффективным энергосберегающим средством в электроприводе Он целесообразен в электротранспортных средствах, работа которых связана с частыми остановками и движением под уклон. В этом случае кинетическая энергия движения транспортного средства (трамвай, троллейбус, электропоезд) преобразуется в электрическую энергию и возвращается в сеть.
Возможен способ перевода двигателя в режим генераторного рекуперативного торможения и при установившейся частоте вращения якоря. Для этого необходимо увеличить в двигателе магнитный поток возбуждения, т.е. ток в обмотке возбуждения.
Из выражения ЭДС якоря Еа = сеФn следует, что с ростом магнитного потока возбуждения Ф при неизменной частоте вращения n ЭДС якоря Еа увеличивается, что ведет к уменьшению тока в цепи якоря:

При ЭДС Еа = U ток якоря Ia = 0, а частота вращения якоря достигает значения n = n0. При дальнейшем увеличении потока возбуждения Ф, а следовательно, возрастании ЭДС якоря Еа пограничная частота вращения снижается (см. 13.12, б), а частота вращения якоря, оставаясь практически неизменной за счет сил инерции вращающихся частей электропривода, начинает превышать пограничную частоту n0. При этом ЭДС якоря превышает напряжение сети и двигатель переходит в режим генераторного рекуперативного торможения.
Динамическое торможение.
Необходимость в таком торможении возникает в том случае, когда после отключения двигателя от сети его якорь под действием кинетической энергии движущихся масс электропривода продолжает вращаться. Если при этом обмотку якоря, отключив от сети, замкнуть на резистор rт, то двигатель перейдет в генераторный режим (обмотка возбуждения должна оставаться включенной в сеть). Вырабатываемая при этом электроэнергия не возвращается в сеть, как это происходит при рекуперативном торможении, а преобразуется в теплоту, которая выделяется в сопротивлении
В режиме динамического торможения ЭДС якоря не меняет своего направления, но поскольку якорь отключен от сети (U = 0), то ток якоря изменит направление, так как будет создаваться ЭДС Еа
т.е. станет отрицательным. В результате электромагнитный момент также
изменит направление и станет тормозящим (рис. 13.15, б). Процесс торможения продолжается до полной остановки якоря (n = 0).
Торможение противовключением.
Допустим, что двигатель работает в основном (двигательном) режиме с номинальной нагрузкой. При отключении двигатели от сети вращающий
момент М = 0, но якорь двигателя за счет кинетической энергии вращающихся масс электропривода некоторое время будет продолжать вращение, т.е. произойдет выбег двигателя.
Чтобы уменьшить время выбега двигателя, применяют торможение противовключением. С этой целью изменяют полярность напряжения на клеммах обмотки якоря (полярность клемм обмотки возбуждения должна остаться прежней) и напряжение питания обмотки якоря становится отрицательным (- U). Но якорь двигателя под действием кинетической энергии вращающихся масс электропривода сохраняет прежнее (положительное) направление вращения, и так как направление магнитного потока не изменилось, то ЭДС якоря Еа также не меняет своего направления и действует согласно напряжению (-U), при этом ток якоря создается суммой напряжения сети U и ЭДС якоря Еа
(рис. 13.15, в):

где rт, — сопротивление резистора в цепи якоря двигателя.
В этих условиях электромагнитный момент станет отрицательным.
Под действием тормозящего момента — Mт, частота вращения якоря уменьшается, достигнув нулевого значения.Если в этот момент цепь якоря не отключить от сети, то произойдет реверсирование двигателя и его якорь под действием момента, который прежде был тормозным, начнет вращение в противоположную сторону. При этом двигатель перейдет в двигательный (основной) режим с отрицательными значениями частоты вращения и вращающего момента. Во избежание нежелательного реверсирования операцию торможения противовключением автоматизируют, чтобы при нулевом значении частоты вращения цепь якоря отключалась от сети.
Источник
Торможение двигателей постоянного тока
Виды электрического торможения. Электрические двигатели, как правило, используют не только для вращения механизмов, но и для их торможения. Электрическое торможение позволяет быстро остановить механизм или уменьшить его частоту вращения без применения механических тормозов.
Различают три вида электрического торможения двигателей постоянного тока: 1) рекуперативное торможение — генераторное торможение с отдачей электрической энергии в сеть; 2) динамическое или реостатное торможение — генераторное торможение с гашением выработанной энергии в реостате, подключенном к обмотке якоря; 3) электромагнитное торможение — торможение противовключением.
Во всех указанных режимах электромагнитный момент М воздействует на якорь в направлении, противоположном и, т. е. является тормозным.
Рекуперативное торможение. Двигатель с параллельным в озбуждением переходит в режим рекуперативного торможения при увеличении его частоты вращения и выше п0 = U/ceФ. В этом случае ЭДС машины становится больше напряжения сети и ток согласно (8.80) изменяет свое направление, т. е. двигатель переходит в генераторный режим. В этом режиме машина создает тормозной момент, а выработанная электрическая энергия отдается в сеть и может быть полезно использована.
В машине с параллельным возбуждением (рис. 8.71, а) механические характеристики генераторного режима являются продолжением механических характеристик двигательного режима в область отрицательных моментов.

Рис. 8.71. Схема и механические характеристики машины постоянного тока в двигательном и генераторном режимах.
Динамическое торможение. При этом виде торможения двигателя с параллельным возбуждением обмотку якоря отключают от сети и присоединяют к ней реостат Rдо6 (рис. 8.72, а) При этом машина работает как генератор, создает тормозной момент, но выработанная электрическая энергия бесполезно гасится в реостате. Регулирование тока Ia = Е/(ΣRa + Rдоб), т. е. тормозного момента М, осуществляют путем изменения сопротивления Rдоб, подключенного к обмотке якоря.

Рис. 8.72. Схема и механические характеристики двигателя с параллельным возбуждением в режиме динамического торможения.
Электромагнитное торможение. В этом режиме изменяют направление электромагнитного момента М, сохраняя неизменным направление тока из сети, т. е. момент делают тормозным. Последнее осуществляют так же, как и при изменении направления вращения двигателя — путем переключения проводов, подводящих ток к обмотке якоря (рис. 8.76, а) или к обмотке возбуждения. Чтобы ограничить значение тока в этом режиме, в цепь обмотки якоря вводят добавочное сопротивление Rдоб. Регулирование тока Ia = (U + Е)/(ΣRa + Rдоб), т. е. тормозного момента М, осуществляют путем изменения сопротивления Rдоб или ЭДС Е (тока возбуждения Iв). Механические характеристики в этом режиме для двигателей с параллельным и последовательным возбуждением показаны на рис. 8.76, б и в.
 Рис.8.76. схема и механические характеристики двигателей в режиме электромагнитного торможения.
Рис.8.76. схема и механические характеристики двигателей в режиме электромагнитного торможения.
21.Универсальные коллекторные двигатели — это электродвигатели малой мощности последовательного возбуждения с секционированной обмоткой возбуждения, благодаря чему они могут работать как на постоянном, так и на переменном стандартных напряжениях примерно с одинаковыми свойствами и характеристиками. Такие электродвигатели используют для привода маломощных быстроходных устройств и многих бытовых приборов. Они допускают простое, широкое и плавное регулирование скорости.
По своему устройству эти двигатели отличаются от двигателей постоянного тока общего применения конструкцией статора, магнитную систему которого собирают из топких изолированных друг от друга листов электротехнической стали с выступающими полюсами, на которых размещают по две секции обмотки возбуждения. Эти секции соединяют последовательно с якорем и располагают по обе стороны от его выводов, что снижает радиопомехи от ценообразования на коллекторе под щетками, которое при питании двигателя от сети переменного напряжения особенно усиливается из-за существенного ухудшения условий коммутации.
Источник



