
- Торможение электродвигателя
- Подписка на рассылку
- Механическое торможение
- Динамическое торможение электродвигателя
- Торможение противовключением
- Конденсаторное торможение электродвигателей
- Рекуперативное торможение
- Остановка двигателей постоянного тока (ДПТ)
- Динамическое торможение
- Торможение противовключением
- Схемы торможения асинхронных двигателей
- Способы торможения асинхронных двигателей
Торможение электродвигателя
Подписка на рассылку
Производственные процессы, связанные с эксплуатацией оборудования, оснащенного электрическими двигателями переменного или постоянного тока, требуют периодической остановки. Однако после отключения питающего напряжения от электродвигателей, их роторы продолжают вращение по инерции и останавливаются только через определенный промежуток времени. Такая остановка электродвигателя называется свободным выбегом.
Для электродвигателей, работающих с частыми пусками-остановами, остановка способом свободного выбега не подходит. Чтобы сократить время, необходимое для полной остановки вращения ротора применяется принудительное торможение. Способы торможения электродвигателя подразделяются на механические и электрические.
Механическое торможение
Остановка двигателей при таком способе торможения осуществляется благодаря специальным колодкам на тормозном шкиве. После отключения питающего напряжения тормозные колодки под воздействием пружин прижимаются к шкиву. В результате возникающего трения колодок о шкив кинетическая энергия вращающегося вала преобразуется в тепловую, что и приводит к его полной остановке. После подачи напряжения электромагнит (YB) растормаживает колодки, и эксплуатация электродвигателя продолжается в штатном режиме.
В зависимости от схемы электрического торможения, кинетическая энергия вращающегося ротора может отдаваться в сеть или на батарею конденсаторов, а также преобразовываться в тепло, которое поглощается обмотками электродвигателя или специальными реостатами.
Динамическое торможение электродвигателя
Эта схема остановки подходит для трехфазных электродвигателей как с которкозамкнутым, так и с фазным ротором.
Динамическое торможение электродвигателя с короткозамкнутым ротором осуществляется посредством отключения обмоток статора от питающей сети трехфазного переменного тока и переключением двух из них через систему контакторов и реле на источник выпрямленного постоянного напряжения.
Обмотки статора после подачи на них постоянного напряжения генерируют стационарное магнитное поле, под воздействием которого в короткозамкнутой «беличьей клетке»
вращающегося ротора начинает индуцироваться электрический ток, вызывающий появление томозного момента. Направление этого момента противоположно направлению вращения останавливающегося вала. После остановки двигателя подача постоянного напряжения на обмотки статора прекращается.
В двигателях с фазным ротором величину тормозного момента можно регулировать с помощью дополнительных сопротивлений, в качестве которых используются пусковые резисторы.
Торможение противовключением
Торможение асинхронного электродвигателя методом противовключения осуществляется путем реверсирования двигателя без отключения от питающей сети.
Управление торможением выполняется реле контроля скорости. В рабочем режиме контакты реле замкнуты. После нажатия на кнопку «СТОП» (SBC) группа контакторов производит переключение двух фаз, меняя порядок их чередования. В результате этого магнитное поле статора начинает вращаться в противоположном направлении, что приводит к замедлению вращения ротора. Когда скорость вращения становится близкой к нулю, реле контроля скорости размыкает контакты и подача питающего напряжения прекращается.
Конденсаторное торможение электродвигателей
Этот способ, называемый еще торможение с самовозбуждением, применим только к электродвигателям с короткозамкнутым ротором.
После прекращения подачи питающего напряжения ротор электродвигателя продолжает вращение по инерции и генерирует в обмотках статора электрический ток, который вначале заряжает батарею конденсаторов, а после накопления номинального заряда возвращается в обмотки. Это приводит к возникновению тормозного момента, величина которого зависти от емкости конденсаторных батарей, подключенных к каждой фазе по схеме «звезда» или «треугольник». Торможение с самовозбуждением применяется на двигателях с большим числом пусков-остановов, так как величина потерь энергии в двигателях при такой схеме остановки минимальная.
Рекуперативное торможение
Рекуперативное или иначе генераторное торможение асинхронных электродвигателей на практике используется в качестве предварительного подтормаживания , а также при опускании грузов кранами всех типов или пассажирских и грузовых лифтовых кабин.
Торможение асинхронного электродвигателя в рекуперативном режиме происходит, когда номинальная частота вращения ротора превышает его синхронную частоту. Двигатель начинает генерировать электрическую энергию и отдавать ее в питающую сеть, в результате чего создается тормозящий момент. Такой способ остановки применяется для многоскоростных двигателей путем постепенного переключения с большей частоты вращения ротора на меньшую. Таким образом, в определенный момент скорость, вращающегося под воздействием инерции вала, будет больше синхронной частоты, соответствующей подключенному количеству полюсов статора. Кроме того, рекуперативная схема торможения применяется для двигателей, подключенных к преобразователям частоты. Для этого достаточно уменьшить частоту питающего напряжения.
Остановка двигателей постоянного тока (ДПТ)
Торможение электродвигателей постоянного тока осуществляется противовключением и динамическим способом.
Динамическое торможение
Такая схема торможения применяется для двигателей с независимым возбуждением.
После нажатия кнопки «Стоп» (SB1) происходит отключение обмоток якоря от питающей сети и переподключение их на тормозной резистор. В обмотках якоря, вращающегося по инерции в стационарном магнитном поле, индуцируется постоянный ток, который проходя по обмоточным проводам резистора, преобразовывается в тепловую энергию.
Торможение противовключением
Метод противовключения основан на изменении полярности напряжения, подключаемого к обмоткам индуктора или якоря двигателя. Это приводит к смене полярности магнитного потока или направлению тока, индуцируемого в якоре. Таким образом, направление вращающего момента меняется на противоположное, что вызывает появление тормозящего эффекта. Скорость вращения якоря контролируется реле скорости, которое отключает питание якоря, когда она приближается к нулевой.
Источник
Схемы торможения асинхронных двигателей
 После отключения от сети электродвигатель продолжает движение по инерции. При этом кинетическая энергия расходуется на преодоление всех видов сопротивлений движению. Поэтому скорость электродвигателя через промежуток времени, в течение которого будет израсходована вся кинетическая энергия, становится равной нулю.
После отключения от сети электродвигатель продолжает движение по инерции. При этом кинетическая энергия расходуется на преодоление всех видов сопротивлений движению. Поэтому скорость электродвигателя через промежуток времени, в течение которого будет израсходована вся кинетическая энергия, становится равной нулю.
Такая остановка электродвигателя при движении по инерции называется свободным выбегом . Многие электродвигатели, работающие в продолжительном режиме или со значительными нагрузками, останавливают путем свободного выбега.
В тех же случаях, когда продолжительность свободного выбега значительна и оказывает влияние на производительность электродвигателя (работа с частыми пусками), для сокращения времени остановки применяют искусственный метод преобразования кинетической энергии, запасенной в движущейся системе, называемый торможением .
Все способы торможения электродвигателей можно разделить на два основных вида: механическое и электрическое.
 При механическом торможении кинетическая энергия преобразуется в тепловую, за счет которой происходит нагрев трущихся и прилегающих к ним частей механического тормоза.
При механическом торможении кинетическая энергия преобразуется в тепловую, за счет которой происходит нагрев трущихся и прилегающих к ним частей механического тормоза.
При электрическом торможении кинетическая энергия преобразуется в электрическую и в зависимости от способа торможения двигателя либо отдается в сеть, либо преобразуется в тепловую энергию, идущую на нагрев обмоток двигателя и реостатов.
Наиболее совершенными считают такие схемы торможения, при которых механические напряжения в элементах электродвигателя незначительны
Схемы динамического торможения асинхронных двигателей
Для управления моментом при динамическом торможении асинхронным двигателем с фазным ротором по программе с заданием времени используются узлы схем, приведенные н а рис. 1, из которых схема р и с. 1, а применяется пр и наличии сети постоянного тока, а схема рис. 1, б — при отсутствии ее.
В качестве тормозных резисторов в роторе используются пусковые резисторы R1, включение которых в режиме динамического торможения производится отключением контакторов ускорения, показанных в рассматриваемых узлах схем условно в виде одного контактора КМ3, команда на отключение которого подается блокировочным контактом линейного контактора КМ1.
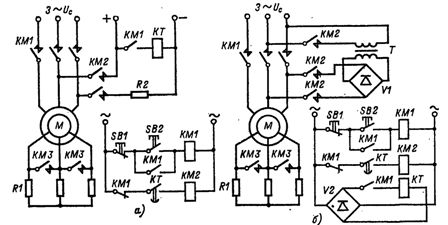
Рис. 1 Схемы управления динамическим торможением асинхронных двигателей с фазным ротором с заданием времени при наличии и отсутствии сети постоянного тока
Эквивалентное значение постоянного тока в обмотке статора при торможении обеспечивается в схеме рис. 1, а дополнительным резистором R2, а в схеме рис. 1. б соответствующим выбором коэффициента трансформации трансформатора Т.
Контактор торможения КМ2 может быть выбран как на постоянном, так и на переменном токе в зависимости от требуемого числа включений в час и использования пусковой аппаратуры.
Приведенные н а рис. 1 схемы управления могут использоваться для управления режимом динамического торможения асинхронного двигателя с короткозамкнутым ротором. Для этого обычно используется схема с трансформатором и выпрямителем, приведенная на р и с. 1 , б.
Схемы торможения противовключением асинхронных двигателей
При управлении моментом при торможении противовключением асинхронного двигателя с короткозамкнутым ротором с контролем скорости применяется узел схемы, приведенный на рис. 2.
В качестве реле противовключения используется реле контроля скорости SR, укрепляемое на двигателе. Реле настраивается на напряжение отпадания, соответствующее скорости, близкой к нулю и равной (0,1 — 0,2) ω уст.
Схема используется для остановки двигателя с торможением противовключением в реверсивной (рис. 2, а) в в нереверсивной (рис. 2, б) схемах. Команда SR используется для отключения контакторов КМ2 или КМЗ и КМ4, отключающих обмотку статора от напряжения сети при скорости двигателя, близкой к нулю. При реверсировании двигателя команды SR не используются.
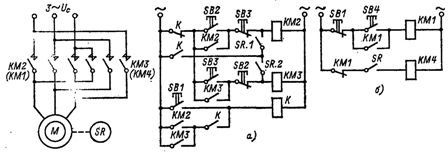
Рис. 2 Узлы схемы управления торможения противовключением асинхронного двигателя с коооткозамкнутым ротором с контролем скорости при остановке в реверсивной и нереверсивной схемах
Узел управления асинхронным двигателем с фазным ротором в режиме торможения противовключеиием с одной ступенью, состоящей из R1 и R2, приведен на рис. 3. Управляющее реле противовключения KV, в качестве которого применяется, например, реле напряжения постоянного тока типа РЭВ301, которое подключено к двум фазам ротора через выпрямитель V. Реле настраивается на напряжение отпадания.
Часто для настройки реле KV используется дополнительный резистор R3. Схема в основном применяется при реверсировании АД со схемой управления, приведенной на рис. 3, а, но может использоваться и при остановке в нереверсивной схеме управления, приведенной на рис. 3, б.
При пуске двигателя реле противовключения КV не вклгочатся и ступень противовключения резистора ротора R1 выводится сразу после подачи управляющей команды на пуск.
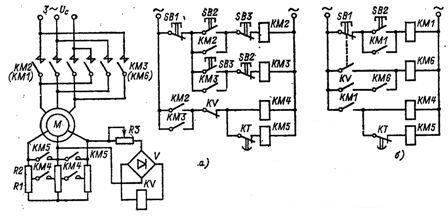
Реле KV отключает контакторы КМ4 и КМ5 и тем самым вводит полное сопротивление Rl + R 2 ротор двигателя.
В конце процесса торможения при скорости асинхронного двигателя, близкой к нулю и составляющей примерно 10 — 20 % установившейся начальной скорости ω пер = (0,1 — 0,2) ωуст , реле KV отключается, обеспечивая команду на отключение ступени противовключения R1 с помощью контактора КМ4 и на реверсирование электродвигателя в реверсивной схеме или команду на остановку электродвигателя в нереверсивной схеме.
В приведенных схемах в качестве управляющего устройства может применяться командоконтроллер и другие аппараты.
Схемы механического торможения асинхронных двигателей
При остановке асинхронных двигателей, а также для удержания механизма передвижения или подъема, например в крановых промышленных установках, в неподвижном состоянии при отключенном двигателе применяется механическое торможение. Оно обеспечивается электромагнитными колодочными или другими тормозами с трехфазным электромагнитом переменного тока, который при включении растормаживает тормоз. Электромагнит тормоза YB включается и отключается вместе с двигателем (рис 4, а).
Напряжение на электромагнит тормоза YB может подаваться контактором торможения КМ2, если нужно отключать тормоз не одновременно с двигателем, а с некоторой задержкой по времени, например после окончания электрического торможения (рис. 4, б)
Выдержку времени обеспечивает реле времени КТ, получающее команду на начало отсчета времени, обычно при отключении линейного контактора КМ1 (рис. 4, в).
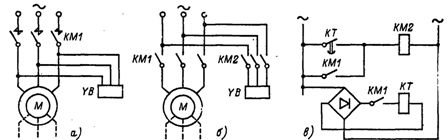
Рис. 4. Узлы схем, осуществляющих механическое торможение асинхронных двигателей
В асинхронных электроприводах применяются также электромагнитные тормоза постоянного тока при управлении электродвигателем от сети постоянного тока.
Схемы конденсаторного торможения асинхронных двигателей
Для торможения АД с короткозамкнутым ротором применяется также конденсаторное торможение с самовозбуждением. Оно обеспечивается конденсаторами C1 — С3, подключенными к обмотке статора. Включаются конденсаторы по схеме звезды (рис. 5, а) или треугольника (рис. 5, б).
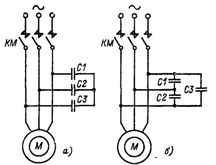
Рис. 5. Узлы схем, осуществляющих конденсаторное торможение асинхронных двигателей
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Способы торможения асинхронных двигателей




![]()
![]()
Лекция 18.
Асинхронная машина, подключенная к трехфазной сети, может работать в режимах двигателя (0 1, квадрант IV).
В режиме электромагнитного тормоза направления вращения полей статора и ротора противоположны и режим называют торможением противовключением. Такое торможение достигается изменением направления вращения поля статора. При этом характеристика Е1 заменяется обращенной характеристикой Е2. Для уменьшения токов АД одновременно уменьшают напряжение статора (характеристика И2). Рабочая точка из а1 по горизонтали скачком переходит в а2 и затем по характеристике И2 движется вниз. При достижении точки а3 (n = 0) АД нужно отключить от сети, иначе начнется реверс. При активном моменте МС (груз в подъемнике) возможен второй способ торможения противовключением: в цепь ротора вводится большое сопротивление (характеристика И1) и АД включается на подъем. Под действием преобладающего момента МС > Мп из точки а4 начнется спуск груза с подтормаживанием. В точке а5 пересечения характеристик И1 и МС установится частота спуска –n2 (тормозной спуск).
 Характеристики торможения противо- включением Характеристики торможения противо- включением |
Рекуперативное торможение возникает, если двигатель переходит в
Этот вид торможения наблюдается в частотно-управляемых двигателях при понижении частоты f1, а также в многоскоростных двигателях при переходе на низкую скорость.
Например, при увеличении числа пар полюсов характеристика Е1 заменяется на Е2, при этом рабочая точка а1 по горизонтали скачком переходит в точке а2 и далее по характеристике Е2 плавно в точке а3, а4. Участок а2а3 является генераторным. Ему соответствует торможение (М n1, т. е. переходит в генераторный режим, при этом кинетическая энергия груза преобразуется в электрическую энергию и отдается в сеть.
 |
Динамическое торможение осуществляют отключением обмоток статора от трехфазной сети и подключением к источнику постоянного напряжения U0 (рисунок а). Постоянный ток I0 обмоток статора создает неподвижное магнитное поле, под действием которого в обмотке вращающегося по инерции ротора индуцируются токи, создающие тормозной момент. Искусственные механические характеристики в режиме динамического торможения (рисунок б) можно регулировать изменением сопротивлений R0 или Rд в цепи ротора (кривая 1). Кривая 2 соответствует двигателю с короткозамкнутым ротором.
Динамическое торможение: а – схема; б – характеристики
Рабочими характеристиками АД называют зависимости частоты вращения n, момента на валу М, тока статора I1, КПД η и cosφ1 от полезной мощности Р2 при U1ном, f1ном .
 Рабочие характеристики асинхронного двигателя Рабочие характеристики асинхронного двигателя |
Характеристика n(Р2) по форме близка к механической характеристике n(М) и является жесткой. Характеристика М(Р2) близка к линейной, поскольку n и Ω изменяются мало. Зависимость I1(Р2) начинается с точки I0 холостого хода, который для АД составляет (0,25¸0,35)I1ном. Мощность всех потерь в АД складывается из мощности постоянных потерь (механические и потери из-за вихревых токов и гистерезиса) и мощности переменных потерь (нагрев обмоток статора и ротора). КПД η достигает максимума при равенстве постоянных и переменных потерь. У АД это условие выполняется при наиболее вероятной нагрузке, т. е. при Р2 = (0,6¸0,7)Р2ном. КПД микромашин составляет 0,4¸0,6, машин малой и средней мощности – 0,7¸0,9, мощных машин – 0,9¸0,95. Коэффициент мощности cosφ1 на холостом ходе низок (не более 0,2). С ростом нагрузки он растет и достигает максимума при Р2 » Р2ном. Для двигателей малой и средней мощности при полной загрузке cosφ1 = 0,7¸0,9, при Р2 > 100 кВт cosφ1 = 0,9¸0,95. Значениям cosφ1 = 0,7¸0,9 соответствуют значения sinφ1 = 0,7¸0,3, т. е. даже при полной загрузке доля реактивного тока статора составляет 70–30%. При неполной загрузке АД cosφ1 существенно снижается, а в режимах, близких к холостому ходу, АД загружает сеть в основном реактивным током. Поэтому полная загруженность АД – необходимая мера по повышению cosφ промышленных предприятий.
Источник



