
Виды соединения звеньев в САУ (Лекция)
1. Последовательное соединение звеньев
2. Параллельное соединение звеньев
3. Встречно-параллельное соединение звеньев
При рассмотрении структурных схем в САУ предполагается, что звенья являются направленными, то есть преобразуют сигнал в направлении от входа к выходу и что выполняется условие независимости передаточных функций от наличия соседних звеньев. Различают три типа соединения звеньев:
— встречно-параллельное (соединение по принципу обратной связи).
1. Последовательное соединение звеньев
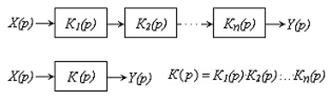
На рис. 1 представлено последовательное соединение трех звеньев .

Рис. Последовательное соединение звеньев
Задача: зная передаточные функции и частотные характеристики отдельных звеньев , получить передаточную функцию и частотные характеристики всей цепи.
 .
.
 . (1)
. (1)
В соответствии с (1) для АФЧХ
 . (2)
. (2)
На основании (2) для АЧХ

 (3)
(3)
На основании (3) для ЛАЧХ
 (4)
(4)
В соответствии с (2) для ФЧХ и ЛФЧХ
 (5)
(5)
К сожалению, для временных динамических характеристик такие простые соотношения отсутствуют. Временные динамические характеристики всей цепи не могут быть найдены по временным динамическим характеристикам отдельных звеньев.
2. Параллельное соединение звеньев
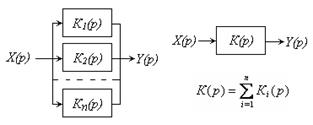
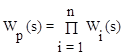
На рисунке ниже представлено параллельное соединение трех звеньев.

Рис. Параллельное соединение звеньев
Передаточная функция всей цепи определяется следующими соотношениями:
 .
.
На основании полученного выражения для  звеньев можно записать
звеньев можно записать
 . (1)
. (1)
Переходная функция  и функция веса
и функция веса  всей цепи определяются следующими соотношениями:
всей цепи определяются следующими соотношениями:
 , (2)
, (2)
 . (3)
. (3)
Для получения частотных динамических характеристик всей цепи надо рассматривать всю цепь целиком.
3. Встречно-параллельное соединение звеньев
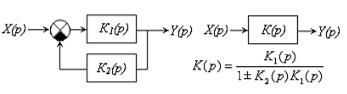
Далее представлено встречно-параллельное соединение трех звеньев .

Рис. Встречно-параллельное соединение звеньев
Цепь, содержащая звено  (
(  ), называется прямой (обратной) связью.
), называется прямой (обратной) связью.
Зная передаточные функции  и
и  , найти передаточную функцию всей цепи.
, найти передаточную функцию всей цепи.
 (1)
(1)
 (2)
(2)
3.1. Классификация обратных связей
Предположим, что  , тогда, если к сумматору обратная связь (ОС) подходит со знаком + (-), то ОС называется положительной (отрицательной). При положительной ОС в знаменателе должен стоять (-), при отрицательной – (+).
, тогда, если к сумматору обратная связь (ОС) подходит со знаком + (-), то ОС называется положительной (отрицательной). При положительной ОС в знаменателе должен стоять (-), при отрицательной – (+).
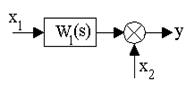
Если  , то ОС называется единичной. В этом случае структурная схема имеет вид
, то ОС называется единичной. В этом случае структурная схема имеет вид


Рис. Единичная обратная связь
Если звено является позиционным, то ОС называется жёсткой. Если звено дифференцирующего типа, то ОС называется гибкой или скоростной.
САУ могут содержать несколько обратных связей, например, так, как показано далее.

Рис. Несколько обратных связей
Единичная ОС является местной ОС, а связь, содержащая звено  , является главной. Главная ОС в подавляющем большинстве случаев является отрицательной.
, является главной. Главная ОС в подавляющем большинстве случаев является отрицательной.
Полученные соотношения между передаточными функциями для трех типов соединения звеньев позволяют получить передаточные функции и для сложных соединений звеньев.
Пусть дана структурная схема системы.

Рис. Пример соединения звеньев
Передаточная функция всей цепи запишется в следующем виде:
Источник
Способы соединения элементов САР
При решении задач анализа САР ее удобно представлять в виде структурной схемы (структурной динамической схемы), которая является графическим отображением математической модели системы. Имея такую модель и зная динамические характеристики отдельных звеньев, составляющих структурную схему, можно определить динамические характеристики САР.
Отдельные звенья на такой схеме условно обозначают в виде прямоугольников, внутри которых записывают выражения передаточной функции. Входные и выходные сигналы для каждого звена выражают в определенной форме, т.е. в виде изображений X(P) и Y(P). Устройство сравнения изображают в виде круга, разделенного на четыре сектора. Сектор, куда подается вычитаемая величина, обозначают знаком «-» или затушевывают.
Основными видами соединений звеньев являются: последовательное, параллельное и соединение с обратной связью (встречно-параллельное).
При последовательном соединении выход первого звена подсоединяется к входу последующего и т. д. (см. рис. 13.13). При таком соединении передаточные функции отдельных звеньев перемножаются. Произведение будет являться передаточной функцией всего соединения.
 |
| Рис. 13.13 – Последовательное соединение динамических звеньев |
При параллельном соединении входы всех звеньев подсоединяются к источнику входного воздействия и образуют общий вход, а выходы соединяются вместе и являются общим выходом данного соединения (Рис. 13.14). Передаточной функцией всей цепи является алгебраическая сумма передаточных функций звеньев.
 |
| Рис. 13.14 – Параллельное соединение динамических звеньев |
При соединении с обратной связью (ОС) выход одного звена через другое звено (звено обратной связи) связывается с его входом (рис. 13.15). При этом, если сигнал обратной связи вычитается из входного воздействия, обратная связь будет отрицательной (ООС), если складывается — положительной (ПОС).
Вид связи очень сильно влияет на вид характеристик и динамические свойства систем. Так при ООС повышается быстродействие системы и она становится более устойчивой к внешним воздействиям. Введение ПОС ухудшаются динамические свойства и устойчивость системы снижается.
 |
| Рис. 13.15 – Соединение с обратной связью |
В выражении для передаточной функции всего соединения (13.1) знак «+» ставится при ООС, а знак «-» соответствует ПОС, то есть
 (13.1)
(13.1)
Произведение К2(р)·К1(р), входящее в формулу (13.1), называется передаточной функцией разомкнутой системы и обозначается как КР(р), то есть
Входящая в выражения (13.1) и (13.2) функция К1(р) называется передаточной функцией прямой цепи.
Если К2(р) = 1, т.е. выход звена К1(р) cвязан непос-редственно с его входом, то передаточная функция системы упрощается. Тогда можно записать, что
 (13.3)
(13.3)
Рассмотренные преобразования различных видов соеди-нений звеньев позволяют упростить структурную динами-ческую схему САР. Основное условие преобразования — неизменность динамических характеристик системы.
Устойчивость САР
Под устойчивостью системы понимают ее способность восстанавливать состояние равновесия после прекращения внешнего воздействия.
Для линейной системы связь между входным воздействием х(t) и выходной величиной y(t) описывается линейным дифференциальным уравнением (ЛДУ) n-го порядка:
где a0…an — коэффициенты, характеризующие параметры системы; b0…bm – коэффициенты, определяющие параметры входного воздействия, причем m ≤ n.
Решение ЛДУ представляется в виде двух составляющих – свободной yсв (t) и принужденной yпр (t):
Свободная составляющая характеризует свободное состо-яние системы, не зависящее от внешнего воздействия и опреде-ляемое только свойствами системы.
Устойчивость системы определяется ее поведением после прекращения входного воздействия, т.е. когда x(t)=0. В этом случае ЛДУ системы будет иметь вид:
Решение этого уравнения – свободная составляющая, характеризующая переходный процесс. Она будет иметь вид:
 , (13.7)
, (13.7)
где Сi – постоянные интегрирования, определяемые пара-метрами системы; рi — корни характеристического уравнения
в котором оператор р заменяет операцию дифференцирования.
Из выражения (13.7) видно, что характер поведения системы, т.е. yс(t) зависит от корней рi уравнения (13.8).
В общем случае корни этого уравнения являются комплексно сопряженными, тоесть
где αi — действительная часть; βi – мнимая часть.
Если корни рi действительные (βi = 0), тогда
 . (13.9)
. (13.9)
При этом, если для всех корней αi 0, то с течением времени (t → ∞) процесс yс(t) будет нарастать, что свидетельствует о неустойчивости системы. Если хотя бы один корень рi = 0, то система будет находиться на границе устойчивости. В случае, когда имеются комплексные корни, тогда в решении yс(t) появятся соответствующие им слагаемые вида:
 , (13.10)
, (13.10)
где  — частота колебания;
— частота колебания;  — изменяющаяся во времени амплитуда;
— изменяющаяся во времени амплитуда;  — начальная фаза.
— начальная фаза.
Характер этого колебания будет зависеть от  :
:
— при >0 – колебание нарастает во времени;
— если
Дата добавления: 2016-01-18 ; просмотров: 1694 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Источник
Структурные схемы. Способы соединения звеньев




![]()
![]()
Систему автоматического управления можно рассматривать как комбинацию типовых динамических звеньев. Изображение системы управления в виде совокупности типовых и нетиповых динамических звеньев с указанием связей между ними носит название структурной схемы системы. Звено в этом случае выступает как элементарная структурная единица, преобразователь информации.
Структурные схемы состоят из отдельных структурных элементов. Основными элементами структурных схем являются следующие.
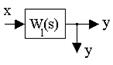
1. Звено с одним входом и одним выходом: Y(s)=W(s)X(s).
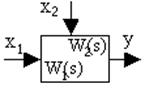
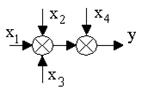
2. Звено с двумя входами и одним выходом (около каждого входа записывается своя передаточная функция):Y(s)=W1(s)X1(s)+W2(s)X2(s)
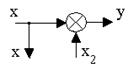
3. Линия связи и узел (разветвление), стрелка показывает направление передачи информации.
 и
и 
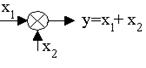
5. Элемент сравнения.
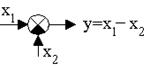 или
или 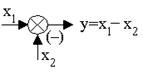
В системах управления встречаются три вида соединений звеньев: последовательное, параллельное и соединение по схеме с обратной связью.
Последовательное соединение звеньев изображено на рис.3.10, такое соединение характеризуется тем, что выход предыдущего звена подается на вход последующего.
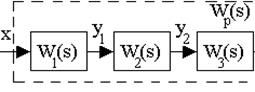

Рис. 3.10. Последовательное соединение звеньев
Выходная величина последовательно соединенных звеньев определяется  .
.
Откуда результирующая передаточная функция  равняется
равняется
 .
.
Следовательно, в общем случае можно записать
 , (3.51)
, (3.51)
где n — число включенных последовательно звеньев.
Таким образом, результирующая передаточная функция последовательно соединенных звеньев равна произведению передаточных функций составляющих звеньев.
Параллельное соединение звеньев изображено на рис.3.11, такое соединение характеризуется тем, что на входы всех звеньев подается одно и то же входное воздействие, а выходная величина определяется суммой выходных величин отдельных звеньев.
Рис. 3.11. Параллельное соединение звеньев
Выходная величина параллельно соединенных звеньев определяется y=y1+y2+y3, т.е.
 .
.
Тогда  .
.
 , (3.52)
, (3.52)
где n — число включенных параллельно звеньев.
Таким образом, результирующая передаточная функция параллельно соединенных звеньев равна сумме передаточных функций составляющих звеньев.
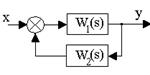
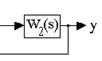
Обратная связь. Такое соединение звеньев изображено на рис.3.12, оно характеризуется тем, что выходной сигнал звена подается на его вход.
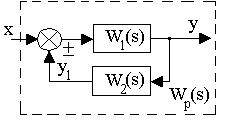
Рис. 3.12. Соединение звеньев по схеме с обратной связью
Обратная связь может быть положительной (ПОС), если сигнал y1, снимаемый с выхода второго звена, суммируется с сигналом x на входе, и отрицательной (ООС), если y1 вычитается. Кроме того, обратные связи могут быть жесткими и гибкими. Связь называется гибкой, если передаточная функция W2(s) в установившемся режиме равна нулю.
Для определения результирующей передаточной функции такой комбинации звеньев запишем очевидные соотношения:
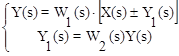 ,
,
где знак “+” относится к положительной, а знак “-” — к отрицательной обратной связи.
Откуда результирующая передаточная функция обратной связи имеет вид
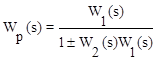 , (3.53)
, (3.53)
где знак “+” соответствует ООС, знак “-” — ПОС.
В общем случае, сложная цепь динамических звеньев, образующих систему управления, включает в себя комбинации всех трех рассмотренных случаев, т.е. представляет собой смешанное соединение звеньев. Пользуясь выражениями (3.51), (3.52) и (3.53), можно найти общую результирующую передаточную функцию смешанного соединения звеньев.
В тех случаях, когда структурная схема системы оказывается сложной и содержит перекрестные связи, ее упрощают и сводят к простейшему эквивалентному виду, пользуясь правилами преобразования структурных схем [1,2,7].
Основные правила эквивалентного преобразования структурных схем.
1. Перенос сумматора:
 Þ
Þ 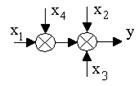
 Þ
Þ 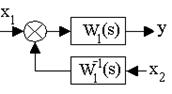
 Þ
Þ 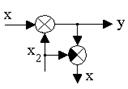
 Þ
Þ 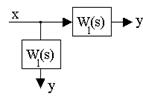
3. Преобразование к единичной обратной связи.
 Þ
Þ 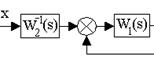
Источник



