
Пуск, реверсирование и торможение двигателей постоянного тока
 Пуск двигателя постоянного тока прямым включением его на напряжение сети допустим только для двигателей небольшой мощности. При этом пик тока в начале пуска может быть порядка 4 — 6-кратного номинального. Прямой пуск двигателей постоянного тока значительной мощности совершенно недопустим, потому что начальный пик тока здесь будет равен 15 — 50-кратному номинальному. Поэтому пуск двигателей средних и больших мощностей производят при помощи пускового реостата, который ограничивает ток при пуске до допустимых по коммутации и механической прочности значений.
Пуск двигателя постоянного тока прямым включением его на напряжение сети допустим только для двигателей небольшой мощности. При этом пик тока в начале пуска может быть порядка 4 — 6-кратного номинального. Прямой пуск двигателей постоянного тока значительной мощности совершенно недопустим, потому что начальный пик тока здесь будет равен 15 — 50-кратному номинальному. Поэтому пуск двигателей средних и больших мощностей производят при помощи пускового реостата, который ограничивает ток при пуске до допустимых по коммутации и механической прочности значений.
Пусковой реостат выполняется из провода или ленты с высоким удельным сопротивлением, разделенных на секции. Провода присоединяются к медным кнопочным или плоским контактам в местах перехода от одной секции к другой. По контактам перемещается медная щетка поворотного рычага реостата. Реостаты могут иметь и другое выполнение. Ток возбуждения при пуске двигателя с параллельным возбуждением устанавливается соответствующим нормальной работе, цепь возбуждения включается прямо на напряжение сети, чтобы не было уменьшения напряжения, обусловленного падением напряжения в реостате (см. рис. 1).
Необходимость иметь нормальный ток возбуждения связана с тем, что при пуске двигатель должен развивать возможно больший допустимый момент Мэм, необходимый для обеспечения быстрого разгона. Пуск двигателя постоянного тока производится при последовательном уменьшении сопротивления реостата, обычно — путем перевода рычага реостата с одного неподвижного контакта реостата на другой и выключения секций; уменьшение сопротивления может производиться и путем замыкания накоротко секций контакторами, срабатывающими по заданной программе.
При пуске вручную или автоматически ток изменяется от максимального значения, равного 1,8 —2,5-кратному номинальному в начале работы при данном сопротивлении реостата, до минимального значения, равного 1,1 — 1,5-кратному номинальному в конце работы и перед переключением на другое положение пускового реостата. Ток якоря после включения двигателя при сопротивлении реостата rп составляет
где Uс — напряжение сети.
После включения начинается разгон двигателя, при этом возникает противо-ЭДС Е и уменьшается ток якоря. Если учесть, что механические характеристики n = f1(M н) и n = f2 (I я ) практически линейны, то при разгоне увеличение скорости вращения будет происходить по линейному закону в зависимости от тока якоря (рис. 1).
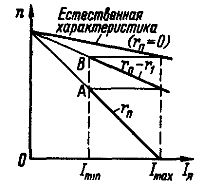
Рис. 1. Диаграмма пуска двигателя постоянного тока
Пусковая диаграмма (рис. 1) для различных сопротивлений в цепи якоря представляет собой отрезки линейных механических характеристик. При уменьшении тока якоря IЯ до значения Imin выключается секция реостата с сопротивлением r1 и ток возрастает до значения
где E1 — ЭДС в точке А характеристики; r1—сопротивление выключаемой секции.
Затем снова происходит разгон двигателя до точки В, и так далее вплоть до выхода на естественную характеристику, когда двигатель будет включен прямо на напряжение Uc. Пусковые реостаты рассчитаны по нагреву на 4 —6 пусков подряд, поэтому нужно следить, чтобы в конце пуска пусковой реостат был полностью выведен.
При остановке двигатель отключается от источника энергии, а пусковой реостат полностью включается — двигатель готов к следующему пуску. Для устранения возможности появления больших ЭДС самоиндукции при разрыве цепи возбуждения и при ее отключении цепь может замыкаться на разрядное сопротивление.
В регулируемых приводах пуск двигателей постоянного тока производится путем постепенного повышения напряжения источника питания так, чтобы ток при пуске поддерживался в требуемых пределах или сохранялся в течение большей части времени пуска примерно неизменным. Последнее можно осуществить путем автоматического управления процессом изменения напряжения источника питания в системах с обратными связями.
Пуск двигателей постоянного тока с последовательным возбуждением производится также при помощи пусковых устройств. Пусковая диаграмма представляет собой отрезки нелинейной механической характеристики для различных сопротивлений цепи якоря. Пуск при относительно небольших мощностях может выполняться вручную, а при больших — путем замыкания накоротко секций пускового реостата контакторами, которые срабатывают при управлении вручную или автоматически.
Реверсирование — изменение направления вращения двигателя — производится путем изменения направления действия вращающего момента. Для этого требуется изменить направление магнитного потока двигателя постоянного тока, т. е. переключить обмотку возбуждения или якорь, при этом в якоре будет протекать ток другого направления. При переключении и цепи возбуждения, и якоря направление вращения останется прежним.
Обмотка возбуждения двигателя параллельного возбуждения имеет значительный запас энергии: постоянная времени обмотки составляет секунды для двигателей больших мощностей. Значительно меньше постоянная времени обмотки якоря. Поэтому для того чтобы реверсирование проходило возможно быстрее, производится переключение якоря. Только там, где не требуется быстродействия, можно выполнять реверсирование путем переключения цепи возбуждения.
Реверсирование двигателей последовательного возбуждения можно производить переключением или обмотки возбуждения, или обмотки якоря, так как запасы энергии в обмотках возбуждения и якоря невелики и их постоянные времени относительно малы.
При реверсировании двигателя с параллельным возбуждением якорь сперва отключается от источника питания и двигатель механически тормозится или переключается для торможения. После окончания торможения якорь переключается, если он не был переключен в процессе торможения, и выполняется пуск при другом направлении вращения.
В такой же последовательности производится и реверсирование двигателя последовательного возбуждения: отключение — торможение — переключение — пуск в другом направлении. У двигателей со смешанным возбуждением при реверсировании следует переключить якорь либо последовательную обмотку вместе с параллельной.
Торможение необходимо для того, чтобы уменьшить время выбега двигателей, которое при отсутствии торможения может быть недопустимо велико, а также для фиксации приводимых механизмов в определенном положении. Механическое торможение двигателей постоянного тока обычно производится при наложении тормозных колодок на тормозной шкив. Недостатком механических тормозов является то, что тормозной момент и время торможения зависят от случайных факторов: попадания масла или влаги на тормозной шкив и других. Поэтому такое торможение применяется, когда не ограничены время и тормозной путь.
В ряде случаев после предварительного электрического торможения при малой скорости можно достаточно точно произвести остановку механизма (например, подъемника) в заданном положении и зафиксировать его положение в определенном месте. Такое торможение применяется и в аварийных случаях.
Электрическое торможение обеспечивает достаточно точное получение требуемого тормозящего момента, но не может обеспечить фиксацию механизма в заданном месте. Поэтому электрическое торможение при необходимости дополняется механическим, которое входит в действие после окончания электрического.
Электрическое торможение происходит, когда ток протекает согласно с ЭДС двигателя. Возможны три способа торможения.
Торможение двигателей постоянного тока с возвратом энергии в сеть. При этом ЭДС Е должна быть больше напряжения источника питания UС и ток будет протекать в направлении ЭДС, являясь током генераторного режима. Запасенная кинетическая энергия будет преобразовываться в электрическую и частично возвращаться в сеть. Схема включения показана на рис. 2, а.
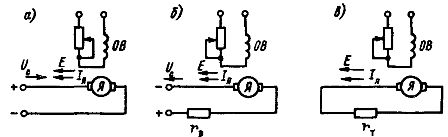
Рис. 2. Схемы электрического торможения двигателей постоянного тока: я — с возвратом энергии в сеть; б — при противовключении; в — динамическое торможение
Торможение двигателя постоянного тока может быть выполнено, когда уменьшается напряжение источника питания так, что Uc
Торможение при противовключении выполняется путем переключения вращающегося двигателя на обратное направление вращения. При этом ЭДС Е и напряжение Uc в якоре складываются, и для ограничения тока I следует включать резистор с начальным сопротивлением

где Imах — наибольший допустимый ток.
Торможение связано с большими потерями энергии.
Динамическое торможение двигателей постоянного тока выполняется при включении на зажимы вращающегося возбужденного двигателя резистора rт (рис. 2, в). Запасенная кинетическая энергия преобразуется в электрическую и рассеивается в цепи якоря как тепловая. Это наиболее распространенный способ торможения.

Схемы включения двигателя постоянного тока параллельного (независимого) возбуждения: а — схема включения двигателя, б — схема включения при динамическом торможении, в — схема для противовключения.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
БЛОГ ЭЛЕКТРОМЕХАНИКА
Блог судового электромеханика. Электроника, электромеханика и автоматика на судне. Обучение и практика. В помощь студентам и специалистам
01.11.2012
Регулирование частоты вращения, пуск, реверсирование и торможение электродвигателей постоянного тока
Регулирование частоты вращения. Частоту вращения электродвигателей постоянного тока регулируют: введением резисторов в цепь якоря двигателя; изменением магнитного потока; изменением напряжения, приложенного к якорю электродвигателя.
В зависимости от способа регулирования частоты вращения получаются различные искусственные механические характеристики.
При введении резисторов в цепь якоря у двигателей с независимым и параллельным возбуждением магнитный поток не изменяется, следовательно, остается постоянной частота вращения идеального холостого хода nx, но значение сопротивления вводимого резистора оказывает большое влияние на наклон механической характеристики, так как возрастает угловой коэффициент:

Рис. 2.3. Механические характеристики электродвигателя с параллельным возбуждением
Изменение сопротивления цепи якоря для двигателя с последовательным возбуждением приведет к смещению характеристики вниз в сторону уменьшения n.
Магнитный поток электродвигателей можно изменить введением дополнительного резистора в цепь обмотки возбуждения, причем уменьшаются ток возбуждения и магнитный поток двигателя.
Изменение магнитного потока приводит к увеличению частоты вращения идеального холостого хода и изменению наклона механической характеристики у двигателей с независимым, параллельным и смешанным возбуждением.
Действительно, если Ф = Ф0, то для естественной характеристики
Таким образом, искусственная механическая характеристика, полученная при введении резистора в цепь обмотки возбуждения двигателя, располагается выше естественной (характеристика 2), частота вращения идеального холостого хода и наклон характеристики увеличиваются.
Изменение питающего цепь якоря напряжения при неизменном напряжении в цепи независимой обмотки возбуждения приводит у двигателей с независимым возбуждением к изменению частоты вращения идеального холостого хода при неизменном наклоне характеристики.

Следовательно, искусственная характеристика расположится ниже естественной и будет параллельна ей (характеристика 3). У двигателя, имеющего смешанное возбуждение, искусственная характеристика также будет ниже естественной.
Анализируя полученные механические характеристики электродвигателей постоянного тока, можно установить, что при одном и том же моменте на валу электродвигателя частота вращения его на разных характеристиках будет различной. Поэтому частоту вращения электродвигателей регулируют способами, используемыми для получения искусственных характеристик. Различают параметрическое и импульсное регулирование.
При параметрическом способе изменяется какой-либо параметр, который далее остается неизменным. Импульсное регулирование характеризуется периодическим ступенчатым изменением какого-либо параметра с определенной частотой.
Каждому из параметрических способов присущи свои особенности, определившие область их применения.
Введение резистора в цепь якоря приводит к уменьшению частоты вращения, причем эффективность регулирования тем больше, чем больше нагружен двигатель. Способ не экономичен из-за больших потерь энергии в дополнительном резисторе, но все же используется вследствие его простоты.
Введение резистора в цепь обмотки возбуждения приводит к увеличению частоты вращения. Этот способ экономичен, так как ток возбуждения составляет 2—5 % тока якоря и потери в резисторе невелики. Однако этот способ не позволяет получить частоту вращения двигателя меньше номинальной.
Изменение приложенного к якорю напряжения — наиболее удачный способ регулирования. Он экономичен и допускает регулирование частоты вращения в достаточно широких пределах при любых значениях нагрузки, но требует автономных источников питания с широким диапазоном изменения напряжения. Поэтому его целесообразно применять для электроприводов с частыми пусками и большим диапазоном регулирования частоты вращения электродвигателя (рулевые электроприводы, электроприводы оперативных лебедок земснарядов, гребные электрические установки и т.п.). Автономным источником питания может служить генератор постоянного тока с независимым возбуждением. Напряжение можно регулировать с помощью управляемого выпрямителя или магнитного усилителя.
Из импульсных способов регулирования двигателей постоянного тока наиболее широкое распространение получил способ изменения времени включения приложенного к якорю напряжения при постоянной частоте включения. Этот способ называется широтно-импульсным. Среднее значение приложенного к якорю напряжения

Изменяя tp при постоянном Т (изменяя скважность), регулируют среднее значение приложенного к якорю двигателя напряжения и частоту вращения электродвигателя. Частоту включения обычно выбирают в пределах 500—1000 Гц. Возможен другой способ импульсного регулирования, когда время включения tр остается постоянным, а период Т изменяется. Такой способ принято называть частотно-импульсным.
Импульсное регулирование электродвигателей постоянного тока является перспективным для тех электроприводов, для которых применяется регулирование изменением приложенного к якорю напряжения. Основным недостатком этого способа является большое число включений, приводящих к появлению больших переходных токов и требующих специальной аппаратуры.
Пуск электродвигателей постоянного тока. Как известно из курса электротехники, вращающий момент электродвигателя при пуске

Пусковой ток может значительно превышать номинальный ток двигателя из-за отсутствия противо-э. д. с. в момент пуска.
При пуске все дополнительные резисторы в цепях независимой и параллельной обмоток возбуждения должны быть введены и последовательная обмотка не шунтирована.
Отечественная промышленность изготовляет электродвигатели, пусковой ток которых по условиям коммутации должен удовлетворять неравенству Iя.п≤2,5Iя.ном.
При этом наибольший пусковой момент двигателей с независимым и параллельным возбуждением при Ф = const будет также Мп≤2,5Мном.
При таком же пусковом токе у двигателей со смешанным и последовательным возбуждением пусковой момент будет несколько больше вследствие увеличения магнитного потока, создаваемого последователь ной обмоткой, по сравнению с номинальным.
По мере увеличения частоты вращения двигателя растет противо- э.д.с., что приводит к уменьшению тока якоря
следовательно, будет уменьшаться вращающий момент двигателя.
Для обеспечения наиболее быстрого разгона двигателя необходимо поддерживать при пуске момент и ток якоря в определенных пределах.
Различают следующие способы пуска электродвигателей постоянного тока: прямой, с ограничением пусковых токов вследствие изменения сопротивления цепи якоря и импульсный.
Прямой пуск осуществляется непосредственно включением двигателя на полное напряжение сети при отсутствии добавочных элементов в цепях якоря и возбуждения. Преимуществами этого способа являются его простота и отсутствие дополнительной пусковой аппаратуры, недостатком — большой ток в цепи якоря в первоначальный момент пуска, что вызывает искрение на коллекторе, возникновение значительного момента на валу двигателя и колебания напряжения в судовой сети. Прямой пуск применяют для двигателей постоянного тока мощностью не более 1,5 кВт.
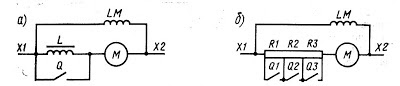
Рис. 2.4. Пуск двигателя постоянного тока
Параметрический пуск основан на предварительном изменении какого-либо параметра двигателя, ограничивающего пусковой ток, с последующим его приведением в процессе пуска к значению соответствующему номинальному режиму.
Для двигателей небольшой мощности применяют пуск с помощью реактора L, включенного последовательно в цепь якоря двигателя (рис. 2.4, а). При правильно подобранной индуктивности реактора время нарастания тока, определяемое электромагнитной постоянной времени электрической цепи,
соизмеримо с временем разгона электродвигателя, что значительно снижает пик пускового тока. Недостатками этого способа являются большие габаритные размеры и масса пускового реактора.
Наибольшее применение получил реостатный способ пуска, при этом способе в цепь якоря для ограничения пусковых токов включают дополнительный реостат (рис. 2.4, б), состоящий из трех-четырех резисторов. По мере разгона электродвигателя секции реостата поочередно закорачивают.
В некоторых случаях пользуются способом пуска, основанным на ступенчатом или плавном изменении напряжения, приложенного к якорю двигателя, от нуля до номинального значения. Этот способ возможен при питании якоря электродвигателя от отдельного источника с регулируемым напряжением. В качестве такого источника могут быть использованы генератор постоянного тока с независимым возбуждением, регулируемый трансформатор с выпрямителем, трансформатор с управляемым выпрямителем.
При импульсном пуске, так же как и при импульсном регулировании частоты вращения, может быть использован как широтно-импульсный, так и частотно-импульсный способ. В том и другом случае пуск осуществляется изменением скважности от нуля до номинального значения.
Реверсирование электродвигателей постоянного тока. Реверсирование— изменение направления вращения на противоположное. Для реверсирования необходимо изменить направление вращающего момента М = СмФIя, что возможно осуществить изменением направления тока в якоре электродвигателя или изменением направления магнитного потока путем изменения направления тока в обмотках возбуждения.
Для двигателей с независимым и параллельным возбуждением предпочтительнее первый способ по сравнению со вторым по сле-дующим причинам:
во-первых, при размыкании обмотки возбуждения, предшествующем ее переключению, возникает значительная э. д. с. самоиндукции
затрудняющая процесс коммутации и увеличивающая вероятность пробоя изоляции;
во-вторых, при реверсировании двигатель сначала необходимо остановить, а затем он начинает вращаться в обратную сторону. Но уменьшение магнитного потока вызовет не уменьшение, а увеличение частоты вращения.
Для двигателей со смешанным возбуждением реверсирование изменением направления магнитного потока еще более затруднено по сравнению с двигателем с параллельным возбуждением, так как у него необходимо переключать две обмотки возбуждения. Для двигателей с последовательным возбуждением оба способа равноценны.
Торможение электродвигателей постоянного тока. При режиме торможения электромагнитный момент на валу электродвигателя направлен в сторону, противоположную направлению вращения.
Режимы торможения используются, когда необходимо: остановить электропривод, вращающийся по инерции; остановить электропривод, вращающийся под действием момента, создаваемого рабочей машиной, например: под действием опускаемого подъемным краном груза; замедлить вращение электропривода при воздействии момента, создаваемого рабочей машиной.
Чтобы осуществить режим торможения электродвигателя, нужно изменить направление вращающего момента на его валу, при этом двигатель переходит в генераторный режим работы. В зависимости от использования энергии различают три вида торможения: рекуперативное, динамическое и противовключением. Рекуперативное торможение сопровождается возвратом энергии в питающую сеть. При динамическом торможении и торможении противовключением энергия превращается в тепловую в элементах цепи якоря двигателя.
Торможение с отдачей энергии в сеть, или рекуперативное торможение, наступает, тогда, когда электродвигатель под действием момента рабочей машины (идущий под уклон железнодорожный состав, опускающийся на подъемном кране груз) разгоняется до частоты вращения, превышающей частоту вращения идеального холостого хода. В этом случае э.д.с. якоря будет больше напряжения в сети, ток изменит свое направление и машина будет работать в режиме генератора, отдавая энергию в сеть. При этом направление вращения двигателя не изменится. Механическая характеристика двигателя с параллельным возбуждением О (рис. 2.5) при торможении с отдачей энергии в сеть будет являться продолжением характеристики

Рис. 2.5. Механические характеристики двигателя постоянного тока при рекуперативном торможении
в область отрицательных моментов. Область режима торможения обозначена цифрой II, область двигательного режима — цифрой I.
У двигателей со смешанным возбуждением при переходе в режим торможения ток в последовательной обмотке меняет свое направление, и поэтому она противодействует параллельной обмотке, размагничивая машину и уменьшая момент торможения (штриховая линия). Во избежание этого последовательную обмотку закорачивают или отключают (характеристика I).
Двигатели с последовательным возбуждением не могут работать в режиме торможения с отдачей энергии в сеть, так как с увеличением частоты вращения ток двигателя уменьшается и он размагничивается. Его э.д.с. никогда не может быть больше напряжения в сети.
Динамическое торможение осуществляют отключением якоря от сети и замыканием его на резистор. Различают два вида динамического торможения: с независимым возбуждением и с самовозбуждением.

Рис. 2.6. Схемы включения и механические характеристики двигателей при динамическом торможении
При торможении двигателей с независимым и параллельным возбуждением применяют торможение с независимым возбуждением (рис. 2.6, а).
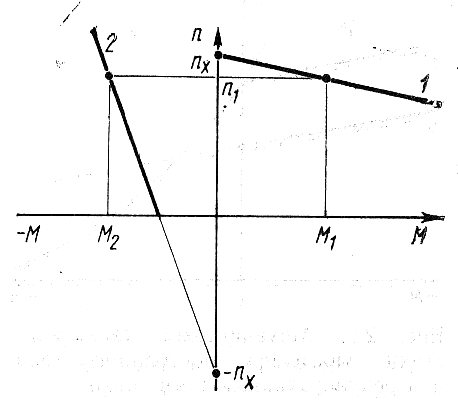
Рис. 2.7. Механическая характеристика двигателя постоянного тока с параллельным возбуждением при торможении противовключением
В этом случае якорь Двигателя отключается от питающей сети и включается на тормозной резистор R1, обмотка возбуждения остается включенной в сеть.
У двигателя со смешанным возбуждением последовательная обмотка отключается или закорачивается.
Торможение двигателя с последовательным возбуждением при питании обмотки возбуждения от сети (рис. 2.6, б) более эффективно, чем торможение с самовозбуждением (рис. 2.6, в), однако для ограничения тока в обмотке необходимо ее подключать через дополнительный резистор R2, мощность рассеяния которого должна равняться мощности электродвигателя
Уравнение механической характеристики при динамическом торможении (при U = 0)
При Ф = const (независимое возбуждение) оно представляет собой уравнение прямой линии.
При самовозбуждении в связи с изменением магнитного потока характеристика искривляется, а при некотором значении частоты вращения самовозбуждение и торможение двигателя прекращаются.
На рис. 2.6, г показаны механические характеристики для динамического торможения: 0 — для торможения с независимым возбуждением; 1 — для торможения с самовозбуждением. Штриховой линией показан участок, на котором торможение прекращается.
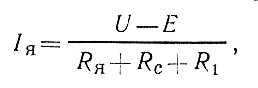
Торможение противовключением производится быстрым реверсированием двигателя по ходу, когда якорь по инерции продолжает вращаться в одном направлении, а обмотки включаются на противоположное. При этих режимах знаки пх и п противоположны, э. д. с. якоря двигателя совпадает по направлению с напряжением и ток якоря
так как в начале торможения Е ≈ U, сопротивление резистора R1 необходимое для ограничения тока до допустимых пределов, должно быть примерно в 2 раза больше пускового сопротивления двигателя. Механическая характеристика при этом способе торможения двигателя с параллельным возбуждением приведена на рис. 2.7 (характеристика 2).
Если двигатель предварительно работал с М1>0 и n1>0 на характеристике 1, то при торможении противовключением уравнение механической характеристики будет

При быстром реверсировании частота вращения двигателя не успеет измениться и режим торможения будет соответствовать точке с моментом М2 и частотой вращения n1 на характеристике 2.
Из рис. 2.7 видно, что при торможении противовключением в момент остановки двигателя (n = 0) момент на его валу не обращается в нуль. Поэтому после остановки двигатель может начать вращаться в обратную сторону. Во избежание этого двигатель после остановки должен быть отключен от сети.
Источник



