
РЕГУЛИРОВАНИЕ ПО ОТКЛОНЕНИЮ
способ регулирования автоматического, при к-ром регулирующее воздействие, подаваемое на объект регулирования, является ф-цией отклонения фактич. значения регулируемой величины от заданного её значения. Достигается введением обратной связи. Универсальность и эффективность Р. по о. заключаются в том, что для регулирования нет необходимости иметь сведения о размере и характере возмущающего воздействия, вызвавшего отклонение. Р. по о. в этой или иной форме лежит в основе действия большинства совр. САУ.
Большой энциклопедический политехнический словарь . 2004 .
Смотреть что такое «РЕГУЛИРОВАНИЕ ПО ОТКЛОНЕНИЮ» в других словарях:
регулирование по отклонению — — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.] Тематики электротехника, основные понятия EN error closing control … Справочник технического переводчика
Регулирование автоматическое — (от нем. regulieren регулировать, от лат. regula норма, правило) поддержание постоянства (стабилизация) некоторой регулируемой величины, характеризующей технический процесс, либо её изменение по заданному закону (программное… … Большая советская энциклопедия
РЕГУЛИРОВАНИЕ АВТОМАТИЧЕСКОЕ — (от нем. rftgulieren регулировать, от лат. regula норма, правило) автоматич. поддержание постоянства или изменение по заданному закону век ров физ. величины, характеризующей технич. процесс. Осуществляется приложением управляющих воздействий к… … Большой энциклопедический политехнический словарь
регулирование (котла) сигналами по возмущению и отклонению регулируемой величины — — [А.С.Гольдберг. Англо русский энергетический словарь. 2006 г.] Тематики энергетика в целом EN feedforward/feedback control … Справочник технического переводчика
РЕГУЛИРОВАНИЕ — автоматический или ручной процесс поддержания или преднамеренного изменения режима работы технического устройства или каких либо физ. величин (параметров) во времени и (млн.) пространстве в соответствии с требованиями получения определённых… … Большая политехническая энциклопедия
линейное регулирование — регулирование по отклонению — [Л.Г.Суменко. Англо русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.] Тематики информационные технологии в целом Синонимы регулирование по отклонению EN proportional control … Справочник технического переводчика
Автоматическое регулирование возбуждения — (АРВ) процесс изменения по заданным условиям тока возбуждения электрических машин. Осуществляется на синхронных генераторах, мощных синхронных двигателях, синхронных компенсаторах, на генераторах и двигателях постоянного тока и на других… … Большая советская энциклопедия
автоматическое регулирование — автоматическое поддержание постоянства какой либо физической величины – температуры, давления, уровня жидкости и т. д., – характеризующей технологический процесс, или её изменение по заданному закону (программное регулирование), или в… … Энциклопедия техники
Сильное регулирование — Автоматическое регулирование возбуждения или частоты вращения синхронных генераторов (компенсаторов) по отклонению напряжения или частоты, а кроме того, и по первым и вторым производным от тока ротора или статора, напряжения и других… … Большая советская энциклопедия
СИЛЬНОЕ РЕГУЛИРОВАНИЕ — возбуждения быстродействующее автоматическое регулирование возбуждения синхронных машин (генераторов, двигателей, компенсаторов). Быстродействие достигается регулированием не только по отклонению, но и по производным во времени режимных… … Большой энциклопедический политехнический словарь
Источник
Общие принципы регуляции живой системы
Живой организм
О, бездна богатства и премудрости и ведения Божия!
Живой организм представляет собой, с одной стороны, сложнейшую многоэлементную систему, и с другой стороны, совокупность иерархически связанных систем. Под системой вообще понимают комплекс взаимозависимых, но в то же время относительно самостоятельных элементов или процессов, объединяемых выполнением определенной функции. Так, организм в целом во всем многообразии его взаимосвязей с внешней средой и выполняемых функций как самостоятельное образование является живой системой. В то же время организм представляет собой сложную иерархию (т.е. взаимосвязь и взаимоподчиненность) систем, составляющих уровни его организации: молекулярный, субклеточный, клеточный, тканевой, органный, системный и организменный. Например, ядро клетки, сама клетка или такой орган как печень могут быть названы живыми или биологическими системами.
Физиологическая регуляция
Физиологической регуляцией называется активное управление функциями организма и его поведением для обеспечения требуемого обмена веществ, гомеостазиса и оптимального уровня жизнедеятельности с целью приспособления к меняющимся условиям внешней среды.
Функцией биологических систем, в том числе и организма в целом, называют их деятельность, направленную на сохранение целостности и свойств системы. Эта деятельность (функция) имеет определенные количественные и качественные характеристики (параметры), меняющиеся для приспособления к условиям среды.
Приспособительные изменения параметров функции ограничены определенными границами гомеостазиса, за пределами которых происходит нарушение свойств системы или даже ее распад и гибель. Изменение параметров функций при поддержании их в границах гомеостазиса происходит на каждом уровне организации или в любой иерархической системе за счет саморегуляции, т.е. внутренних для системы механизмов управления жизнедеятельностью. Так, например, гладкая мышца кровеносных сосудов при растяжении повышает свой тонус, т.е. напряжение, противодействующее растяжению; растяжение сердца притекающей в него по венам кровью вызывает усиление его сокращения и изгнание большего объема крови в артерии; уменьшение кровоснабжения ткани ведет к образованию в ней химических веществ, расширяющих артерии и восстанавливающих тем самым приток крови. Такие механизмы саморегуляции получили название местных. Для осуществления функций организма в целом необходима взаимосвязь и взаимозависимость функций составляющих его систем. Поэтому, наряду с внутренними механизмами саморегуляции систем в организме должны существовать и внешние для каждой из них механизмы регуляции, соподчиняющие и координирующие их деятельность. Например, для реализации функции перемещения в пространстве необходимо изменение деятельности не только скелетных мышц, но и кровообращения, дыхания, обмена веществ и т.п. Эти механизмы реализуются сформировавшейся в процессе эволюции специализированной системой регуляции.
Организм является самоорганизующейся системой. Организм сам выбирает и поддерживает значения огромного числа параметров, меняет их в зависимости от потребностей, что позволяет ему обеспечивать наиболее оптимальный характер функционирования. Так например, при низких температурах внешней среды организм снижает температуру поверхности тела (чтобы уменьшить теплоотдачу), повышает скорость окислительных процессов во внутренних органах и мышечную активность (чтобы увеличить теплообразование). Человек утепляет жилище, меняет одежду (для увеличения теплоизолирующих свойств), причем делает это даже заранее, опережающе реагируя на изменения внешней среды.
Основой физиологической регуляции является передача и переработка информации. Под термином «информация» следует понимать все, что несет в себе отражение фактов или событий, которые произошли, происходят или могут произойти. Информация содержит количественные характеристики определенных параметров, поэтому для организма особую важность имеет ее объем. Одним из способов количественного выражения информации, принятых в информатике как науке и используемых в организме, является двоичная система. Единицей количества информации в таком случае является бит, характеризующий информацию, получаемую при выборе одного из двух вероятных состояний, например, «да — нет», «все — ничего», «быть — не быть» и т.п. Материальным носителем информации является сигнал, в форме которого и переносится информация. Это могут быть как физические, так и химические сигналы, например, электрические импульсы, форма молекулы, концентрация молекул и т.д.
Наглядным примером двоичной системы выражения информации в организме является процесс возбуждения клетки под влиянием раздражителя; передача возбуждения по нервам в виде серии электрических потенциалов (импульсов) с различиями лишь в числе импульсов в серии (пачке) и продолжительностью межимпульсных (межпачечных) интервалов. Таков один из способов кодирования информации в нервной системе. Могут быть и другие способы кодирования, например, генетический код структуры ДНК, структурное кодирование чужеродности белковых молекул.
Переработка информации осуществляется управляющей системой или системой регуляции. Она состоит из отдельных элементов, связанных информационными каналами (рис.3.1).
 Рис.3.1. Блок-схема системы регуляции.
Рис.3.1. Блок-схема системы регуляции.
Двойные рамки и стрелки — основные элементы,
одинарные рамки и стрелки — звенья регуляции по возмущению и отклонению.
Среди элементов выделяются:
- управляющее устройство (центральная нервная система);
- входные ивыходные каналы связи (нервы, жидкости внутренней среды с информационными молекулами веществ);
- датчики, воспринимающие информацию на входе системы (сенсорные рецепторы);
- образования, располагающиеся на исполнительных органах (клетках);
- воспринимающие информацию выходных каналов (клеточные рецепторы).
Часть управляющего устройства, служащая для хранения информации, называется запоминающим устройством или аппаратом памяти. Характер переработки поступающих сигналов зависит от той информации, которая записана в аппарате памяти системы регуляции.
Источник
Способы регулирования в системах автоматики
В системах автоматики применяются три способа регулирования:
1) по отклонению регулируемой величины,
2) по возмущению (по нагрузке),
Способ регулирования по отклонению регулируемой величины рассмотрим на примере системы регулирования частоты вращения двигателя постоянного тока (рис. 1).
При работе двигатель Д, являясь объектом регулирования, испытывает на себе действие различных возмущений (изменения нагрузки на валу двигателя, напряжения питающей сети, частоты вращения двигателя, приводящего во вращение якорь генератора Г, изменение температуры окружающей среды, приводящее в свою очередь к изменению сопротивления обмоток, а следовательно, и токов и т. п.).
Все эти возмущения вызовут отклонение частоты вращения двигателя Д, что повлечет за собой изменение э. д. с. тахогенератора ТГ. В цепь тахогенератора ТГ включен реостат Р1. Напряжение U0, снимаемое с реостата P1 включено встречно с напряжением тахогенератора ТГ. В результате этого получается разность напряжений е = U0 — Uтг, которая через усилитель У подается на двигатель ДП, перемещающий ползунок реостата Р. Напряжение U0 соответствует заданному значению регулируемой величины — частоте вращения ωо, а напряжение тахогенератора U тг — текущему значению частоты вращения.
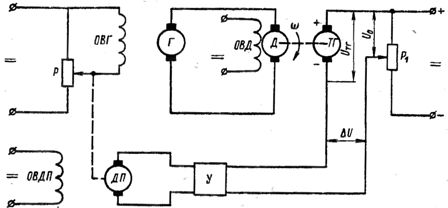
Рис. 1. Принципиальные схемы управления частотой вращения двигателя постоянного тока по замкнутому циклу: Р — реостат, ОВГ — обмотка возбуждения генератора, Г — генератор, ОВД — обмотка возбуждения двигателя, Д — двигатель, ТГ — тахогенератор, ДП — двигатель привода ползунка реостата, У — усилитель.
Если под действием возмущений разность между этими величинами (отклонение) превысит заданный предел, то на регулятор поступит задающее воздействие в виде изменения тока возбуждения генератора, которое заставит это отклонение уменьшиться. В общем случае система, работающая по способу отклонения , представлена схемой на рис. 2 , а.
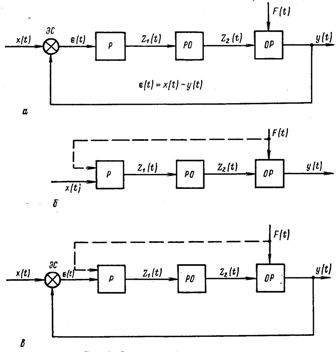
Рис. 2 . Схемы способов регулирования: а — по отклонению, б — по возмущению, в — комбинированный, Р — регулятор, РО — регулирующий орган, ОР — объект регулирования, ЭС — элемент сравнения, х (t ) — задающее воздействие, Z 1(t ) и Z 2 (t ) — внутренние регулирующие воздействия, у (t ) — регулируемая величина, F (t ) — возмущающее воздействие.
Отклонение регулируемой величины приводит в действие регулирующий орган, это действие всегда направлено так, что оно уменьшает отклонение. Для получения разности величин ε (t) = x ( t) — у (f) в систему вводится элемент сравнения ЭС.
Действие регулирующего органа при регулировании по отклонению происходит независимо от того, по какой причине произошло изменение регулируемой величины. Это, несомненно, является большим достоинством данного способа.
Способ регулирования по возмущению, или компенсация возмущения , основан на том, что в системе применяются устройства, компенсирующие влияние изменения возмущающего воздействия.
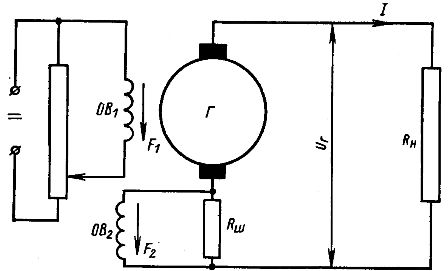
Рис. 3 . Принципиальная схема регулирования напряжения генератора постоянного тока: Г — генератор, ОВ1 и ОВ2 — обмотки возбуждения генератора, Rн — сопротивление нагрузки, F1 и F2 — магнитодвижущие силы обмоток возбуждения, Rш — сопротивление.
В качестве примера рассмотрим работу генератора постоянного тока (рис. 3 ). Генератор имеет две обмотки возбуждения: ОВ 1 включаемую параллельно якорной цепи, и ОВ 2 , включаемую на сопротивление R i . Обмотки возбуждения включены так, что их м. д. с. F 1 и F2 складываются . Напряжение на клеммах генератора будет зависеть от суммарной м. д. с. F = F1+F2.
При увеличении тока нагрузки I (сопротивление нагрузки Rн уменьшается) напряжение генератора Uг должно было бы уменьшиться за счет увеличения падения напряжения в якорной цепи генератора, но этого не произойдет потому, что м. д. с. F2 обмотки возбуждения ОВ2 возрастает, так как она пропорциональна току нагрузки I .
Это приведет к возрастанию суммарной м. д. с, а следовательно, к выравниванию напряжения генератора. Так происходит компенсация падения напряжения при изменении тока нагрузки — основного возмущения на генератор. Сопротивление R ш в данном случае является устройством, позволяющим измерять возмущение — нагрузку.
В общем случае схема системы, работающей по способу компенсации возмущения, показана на рис. 2 , б.
Возмущающие воздействия могут быть вызваны разными причинами, поэтому их может быть не одно, а несколько. Это приводит к усложнению анализа работы системы автоматического регулирования. Обычно ограничиваются рассмотрением возмущающих воздействий, вызванных основной причиной, например изменением нагрузки. В этом случае регулирование называют регулированием по нагрузке.
Комбинированный способ регулирования (см. рис. 2 , в) сочетает в себе два предыдущих способа: по отклонению и по возмущению. Он применяется при построении сложных систем автоматики, где требуется высококачественное регулирование.
Как следует из рис. 2 , при любом способе регулирования всякая система автоматического регулирования состоит из регулируемой (объект регулирования) и регулирующей (регулятор) частей. Регулятор во всех случаях должен иметь чувствительный элемент, который измеряет отклонение регулируемой величины от предписанного значения, а также регулирующий орган, который обеспечивает восстановление заданного значения регулируемой величины после ее отклонения.
Если в системе регулирующий орган получает воздействие непосредственно от чувствительного элемента и приводится им в действие, то такая система регулирования называется системой прямого регулирования, а регулятор — регулятором прямого воздействия.
В регуляторах прямого действия чувствительный элемент должен развивать достаточную мощность для изменения положения регулирующего органа. Это обстоятельство ограничивает область применения прямого регулирования, так как чувствительный элемент стремятся сделать малогабаритным, что в свою очередь создает трудность в получении усилий, достаточных для перемещения регулирующего органа.
Для повышения чувствительности измерительного элемента и получения достаточной мощности для перемещения регулирующего органа применяются усилители мощности. Регулятор, работающий с усилителем мощности, называется регулятором непрямого действия, а система в целом — системой непрямого регулирования.
В системах непрямого регулирования для перемещения регулирующего органа используют вспомогательные механизмы, действующие от постороннего источника энергии или за счет энергии регулируемого объекта. При этом чувствительный элемент воздействует только на управляющий орган вспомогательного механизма.
Классификация способов регулирования автоматики по виду регулирующих воздействий
Регулирующий сигнал вырабатывается системой регулирования на основании задающего воздействия и сигнала с чувствительного элемента, измеряющего действительное значение регулируемой величины. Полученный таким образом регулирующий сигнал поступает на регулятор, который преобразовывает его в регулирующее воздействие исполнительного механизма.
Исполнительный механизм заставляет регулирующий орган объекта принять такое положение, при котором регулируемая величина стремится к заданному значению. При работе системы происходит непрерывное измерение текущего значения регулируемой величины, поэтому регулирующий сигнал также будет вырабатываться непрерывно.
Однако регулирующее воздействие исполнительного механизма в зависимости от устройства регулятора может быть непрерывным или иметь прерывистый характер. На рис. 4, а представлена кривая отклонения Δу регулируемой величины у по времени от заданного значения у0, одновременно в нижней части рисунка показано, как должно непрерывно меняться регулирующее воздействие Z. Оно находится в линейной зависимости от регулирующего сигнала и совпадает с ним по фазе.
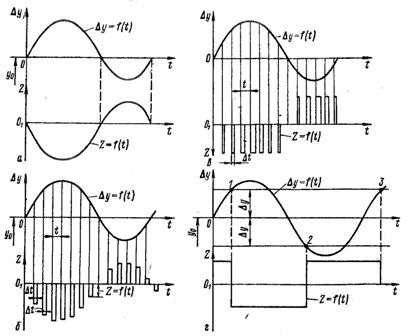
Рис. 4. Диаграммы основных видов регулирующих воздействий: а — непрерывное, б, в — прерывистое, г — релейное.
Регуляторы, вырабатывающие такое воздействие, называются регуляторами непрерывного действия , а само регулирование — непрерывным регулированием . Регуляторы, построенные по такому принципу, работают только тогда, когда существует регулирующее воздействие, т. е. пока имеется отклонение между действительным и предписанным значением регулируемой величины.
Если в процессе работы системы автоматики регулирующее воздействие при непрерывном регулирующем сигнале прерывается в некоторые промежутки времени или подается в форме отдельных импульсов, то регуляторы, работающие по такому принципу, называются регуляторами прерывистого действия (шаговыми, или импульсными) . Принципиально возможны два способа формирования прерывистого регулирующего воздействия.
На рис. 4, б и в представлены графики прерывистого регулирующего воздействия при непрерывном отклонении Δ регулируемой величины.
В первом случае регулирующее воздействие представлено отдельными импульсами одинаковой длительности Δt, следующими через равные интервалы времени t 1 = t2 = t при этом величина импульсов Z = f (t) пропорциональна значению регулирующего сигнала в момент формирования регулирующего воздействия.
Во втором случае все импульсы имеют одинаковую величину Z = f (t) и следуют через равные интервалы времени t 1 = t2 = t но имеют различную длительность Δ t . При этом длительность импульсов зависит от значения сигнала регулирования в момент формирования регулирующего воздействия. Регулирующее воздействие от регулятора передается регулирующему органу с соответствующими перерывами, поэтому регулирующий орган меняет свое положение также с перерывами.
В практике широкое применение находят также системы регулирования релейного типа . Принцип действия релейного регулирования рассмотрим на примере работы регулятора с двухпозиционным регулированием (рис. 4, г).
К регуляторам двухпозиционного регулирования относятся такие регуляторы, которые имеют только два устойчивых положения: одно — когда отклонение регулируемой величины перейдет установленный положительный предел +Δу, и другое — когда отклонение изменит знак и достигнет отрицательного предела -Δу.
Регулирующее воздействие в обеих позициях одинаково по абсолютной величине, но различно по знаку, причем это воздействие через регулятор заставляет регулирующий орган перемещаться скачкообразно таким образом, чтобы абсолютная величина отклонения всегда уменьшалась. Если величина отклонения Δу достигнет допустимого положительного значения +Δу (точка 1), сработает реле и на объект через регулятор и регулирующий орган будет действовать регулирующее воздействие -Z, которое противоположно по знаку, но равно по величине положительному значению регулирующего воздействия +Z. Отклонение регулируемой величины по истечении некоторого времени будет уменьшаться.
Достигнув точки 2, отклонение Δу станет равным допустимому отрицательному значению -Δу, реле сработает и регулирующее воздействие Z изменит свой знак на противоположный и т. д. Релейные регуляторы в сравнении с другими регуляторами просты по устройству, сравнительно недороги и находят широкое применение в тех объектах, где не требуется большая чувствительность к возмущающим воздействиям.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник



