
- Регулирование скорости двигателей постоянного тока
- Регулирование скорости оборотов двигателя постоянного тока
- Методы регулировки
- Заключение
- Регулирование частоты вращения двигателя постоянного тока независимого возбуждения ДПТ НВ
- Регулирование частоты вращения ДПТ НВ введение дополнительного сопротивления в цепь якоря
- Регулирование частоты вращения ДПТ НВ изменением основного магнитного потока
- Регулирование частоты вращения ДПТ НВ изменение напряжения в цепи якоря
- Импульсное регулирование частоты вращения ДПТ НВ
Регулирование скорости двигателей постоянного тока
 Из уравнения электромеханической характеристики двигателя постоянного тока независимого возбуждения следует, что возможны три способа регулирования его угловой скорости:
Из уравнения электромеханической характеристики двигателя постоянного тока независимого возбуждения следует, что возможны три способа регулирования его угловой скорости:
1) регулирование за счет изменения величины сопротивления реостата в цепи якоря,
2) регулирование за счет изменения потока возбуждения двигателя Ф,
3) регулирование за счет изменения подводимого к обмотке якоря двигателя напряжения U . Ток в цепи якоря I я и момент М, развиваемый двигателем, зависят только от величины нагрузки на его валу.
Рассмотрим первый способ регулирования скорости двигателя постоянного тока изменением сопротивления в цепи якоря . Схема включения двигателя для этого случая представлена на рис. 1 , а электромеханические и механические характеристики — на рис. 2 , а.
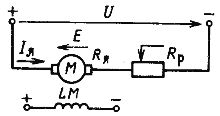
Рис. 1. Схема включения двигателя постоянного тока независимого возбуждения
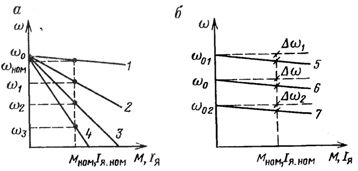
Рис. 2. Механические характеристики двигателя постоянного тока при различных сопротивлениях цепи якоря (а) и напряжениях (б)
Изменяя сопротивление реостата в цепи якоря можно получить при номинальной нагрузке различные угловые скорости электродвигателя на искусственных характеристиках — ω1, ω2, ω3.
Проведем анализ данного способа регулирования угловой скорости двигателей постоянного тока с помощью основных технико-экономических показателей. Так как при данном способе регулирования изменяется жесткость характеристик в широких пределах, то при скоростях менее половины номинальной стабильность работы двигателя резко ухудшается. По этой причине диапазон регулирования скорости ограничен ( D = 2 — З).
Скорость при данном способе можно регулировать в сторону уменьшения от основной, о чем свидетельствуют электромеханические и механические характеристики. Высокую плавность регулирования трудно обеспечить, так как потребовалось бы значительное количество ступеней регулирования и соответственно большое число контакторов. Полное использование двигателя по току (нагреву) в этом случае достигается при регулировании с постоянным моментом нагрузки.
Недостатком рассматриваемого способа является наличие значительных потерь мощности при регулировании, которые пропорциональны относительному изменению угловой скорости. Достоинством рассмотренного способа регулирования угловой скорости являются простота и надежность схемы управления.
Учитывая большие потери в реостате при малых скоростях, данный способ регулирования скорости применяется для приводов с кратковременным и повторно-кратковременным режимами работы.
 При втором способе регулирование угловой скорости двигателей постоянного тока независимого возбуждения осуществляется изменением величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата. При ослаблении потока угловая скорость двигателя как при нагрузке, так и при холостом ходе возрастает, а при усилении потока — уменьшается. Практически возможно изменение скорости только в сторону увеличения ввиду насыщения двигателя.
При втором способе регулирование угловой скорости двигателей постоянного тока независимого возбуждения осуществляется изменением величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата. При ослаблении потока угловая скорость двигателя как при нагрузке, так и при холостом ходе возрастает, а при усилении потока — уменьшается. Практически возможно изменение скорости только в сторону увеличения ввиду насыщения двигателя.
При увеличении скорости ослаблением потока допустимый момент двигателя постоянного тока изменяется по закону гиперболы, а мощность остается постоянной. Диапазон регулирования скорости для данного способа D = 2 — 4 .
Механические характеристики для различных значений потока двигателя приведены на рис. 2 , а и 2 , б, из которых видно, что характеристики в пределах номинального тока имеют высокую степень жесткости.
Обмотки возбуждения двигателей постоянного тока независимого возбуждения обладают значительной индуктивностью. Поэтому при ступенчатом изменении сопротивления реостата в цепи обмотки возбуждения ток, а следовательно, и поток будут изменяться по экспоненциальному закону. В связи с этим регулирование угловой скорости будет осуществляться плавно.
Существенными преимуществами данного способа регулирования скорости являются его простота и высокая экономичность.
Данный способ регулирования используют в приводах в качестве вспомогательного, обеспечивающего повышение скорости при холостом ходе механизма.
Третий способ регулирования скорости заключается в изменении напряжения, подводимого к обмотке якоря двигателя. Угловая скорость двигателя постоянного тока независимо от нагрузки изменяется прямо пропорционально напряжению, подводимому к якорю. Поскольку все регулировочные характеристики являются жесткими, а степень их жесткости остается для всех характеристик неизменной, работа двигателя является стабильной на всех угловых скоростях и, следовательно, обеспечивается широкий диапазон регулирования скорости независимо от нагрузки. Этот диапазон равен 10 и может быть расширен за счет специальных схем управления.
При данном способе угловую скорость можно уменьшать и увеличивать относительно основной. Повышение скорости ограничено возможностями источника энергии с регулируемым напряжением и U ном двигателя.
Если источник энергии обеспечивает возможность непрерывного изменения подводимого к двигателю напряжения, то регулирование скорости двигателя будет плавным.
Данный способ регулирования является экономичным, так-так регулирование угловой скорости двигателя постоянного тока независимого возбуждения осуществляется без дополнительных потерь мощности в силовой цепи якоря. По всем перечисленным выше показателям данный способ регулирования по сравнению с первым и вторым наилучший.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Регулирование скорости оборотов двигателя постоянного тока
С точки зрения регулирования скоростью вращения электродвигателей, интересно уравнение для электромеханических характеристик, соответствующее Второму закону Кирхгофа:
ω = U/C×Φ – ΥЯ /( C×Φ) 3 ×M
При описании технических характеристик электродвигателя скорость, выражаемая оборотами в минуту, зачастую называется частотой вращения ν по известному соотношению:
ω = 2p/T = 2pn
Поэтому эти две разноименные величины часто применяются в одном и том же смысле. Скорость w (частота ν) находится в прямой зависимости от напряжения питания U и в обратной от магнитного потока Ф. Исходя из приведенной выше формулы, возникает вывод, что скоростью можно управлять, регулируя сопротивление якоря, магнитный поток и напряжение питания.

Методы регулировки
Итак, различают три основных варианта регулирования скоростью:
- Изменением напряжения сети. Меняя подводимое питание можно управлять частотой вращения двигателя;
- Добавлением пускового реостата в цепь якоря. Регулируя сопротивление, можно уменьшить скорость вращения;
- Управлением магнитного потока. Двигатели с электромагнитами дают возможность регулировать поток путем изменения тока возбуждения. Однако нижний предел ν min ограничен насыщением магнитной цепи двигателя, что не позволяет увеличивать в большой степени магнитный поток.
К каждому из вариантов соответствует определённая зависимость механических характеристик.
Методы регулирования применительны к двигателям с различными:
- типами возбуждения;
- величиной мощности.
На практике в современных электрических моторах, в связи с недостатками и ограниченности диапазонов, рассмотренные методы не всегда применяются.
Это еще связано с тем, что машины отличаются довольно небольшими КПД, и к тому же не позволяют плавно увеличивать или уменьшать частоту вращения.
Электронные же схемы управления с регуляторами частоты, работающими от аккумуляторной батареи на 12 В, напротив, широко используются. Например, они очень актуальны для управления низковольтными электродвигателями 12 вольт в приборах автоматики, детских игрушках, электрических велосипедах, аккумуляторных детских автомобилях.

Принципиальной особенностью метода является то, что ток в цепи якоря и момент, развиваемый электродвигателем, зависят лишь от величины нагрузки на его валу. Регулировка осуществляется с помощью регулятора оборотов электродвигателя.
В течение очень долгого времени тиристорные преобразователи являлись единственным коммерчески доступными регуляторами двигателей. К слову сказать, они по-прежнему самые распространенные на сегодняшний день. Однако с появлением силовых транзисторов стали наиболее популярными регуляторы оборотов двигателя постоянного тока с широтно-импульсной модуляцией. Приведём для примера ниже схему, работающую от источника постоянного тока 12 В.
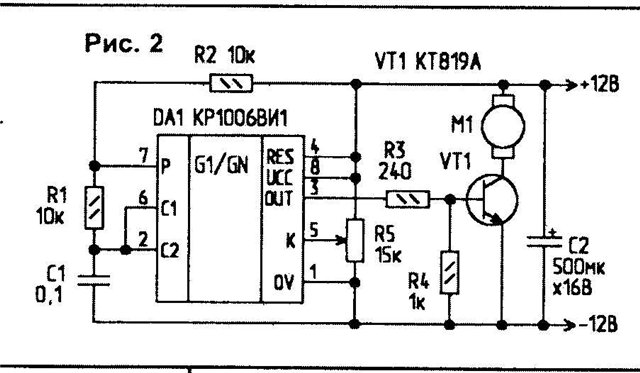
Схема на практике даёт возможность, к примеру, увеличивать либо уменьшать яркость свечения ламп накаливания на 12 вольт.
Последовательно-параллельное управление используется в ситуациях, когда два или более агрегата постоянного тока соединены механически. Схема с последовательным соединением электродвигателей, в которой общее напряжение делится на всех, используется для низкоскоростных приложений. Схема с параллельным соединением машин, имеющих одинаковое напряжение, используется в высокоскоростных применениях.
Заключение
Рассмотренный метод регулировки напряжения сети считается самым эффективным и экономичным вариантом, так как:
- им обеспечивается широкий диапазон изменения скоростей (wmin / wmax) и лучшие энергетические характеристики (КПД);
- он работает без каких-либо потерь мощности в силовой цепи якоря.
Управление осуществляется плавно, и по точности регулировка частоты вращения является весьма высокой.
Источник
Регулирование частоты вращения двигателя постоянного тока независимого возбуждения ДПТ НВ

Способы регулирования частоты вращения двигателей оцениваются следующими показателями: плавностью регулирования; диапазоном регулирования, определяемым отношением наибольшей частоты вращения к наименьшей; экономичностью регулирования, определяемой стоимостью регулирующей аппаратуры и потерями электроэнергии в ней.
Из (29.5) следует, что регулировать частоту вращения двигателя независимого возбуждения можно изменением сопротивления в цепи якоря, изменением основного магнитного потока Ф, изменением напряжения в цепи якоря.
Регулирование частоты вращения ДПТ НВ введение дополнительного сопротивления в цепь якоря
Дополнительное сопротивление (реостат rд) включают в цепь якоря аналогично пусковому реостату (ПР). Однако в отличие от последнего оно должно быть рассчитано на продолжительное протекание тока.
При включении сопротивления rд в цепь якоря выражение частоты (29.5) принимает вид
где  — частота вращения в режиме х.х.;
— частота вращения в режиме х.х.;
 — изменение частоты вращения, вызванное падением напряжения в цепи якоря.
— изменение частоты вращения, вызванное падением напряжения в цепи якоря.
С увеличением rд возрастает  , что ведет к уменьшению частоты вращения. Зависимость n = f(rд) иллюстрируется также и механическими характеристиками двигателя независимого возбуждения (рис. 29.4, а): с повышением rд увеличивается наклон механических характеристик, а частота вращения при заданной нагрузке на валу (M = Mном ) уменьшается. Этот способ обеспечивает плавное регулирование частоты вращения в широком диапазоне (только в сторону уменьшения частоты от номинальной), однако он неэкономичен из-за значительных потерь электроэнергии в регулировочном реостате (I 2 a *rД), которые интенсивно растут с увеличением мощности двигателя.
, что ведет к уменьшению частоты вращения. Зависимость n = f(rд) иллюстрируется также и механическими характеристиками двигателя независимого возбуждения (рис. 29.4, а): с повышением rд увеличивается наклон механических характеристик, а частота вращения при заданной нагрузке на валу (M = Mном ) уменьшается. Этот способ обеспечивает плавное регулирование частоты вращения в широком диапазоне (только в сторону уменьшения частоты от номинальной), однако он неэкономичен из-за значительных потерь электроэнергии в регулировочном реостате (I 2 a *rД), которые интенсивно растут с увеличением мощности двигателя.

Рис. 29.4. Механические характеристики двигателя параллельного возбуждения:
а — при введении в цепь якоря добавочного сопротивления;
б — при изменении основного магнитного потока;
в — при изменении напряжения в цепи якоря
Регулирование частоты вращения ДПТ НВ изменением основного магнитного потока
Этот способ регулирования в двигателе независимого возбуждения реализуется посредством реостата rрег в цепи обмотки возбуждения. Так, при уменьшении сопротивления реостата возрастает магнитный поток обмотки возбуждения, что сопровождается понижением частоты вращения [см. (29.5)]. При увеличении rрег частота вращения растет. Зависимость частоты вращения от тока возбуждения выражается регулировочной характеристикой двигателя n=f(IВ) при  и
и  .
.
Из выражения (29.5) следует, что с уменьшением магнитного потока Ф частота вращения n увеличивается по гиперболическому закону (рис. 29.5,а). Но одновременно уменьшение Ф ведет к росту тока якоря Ia = M/(Cм*Ф). При потоке  ток якоря достигает значения
ток якоря достигает значения  , т. е. падение напряжения в цепи якоря достигает значения, равного половине напряжения, подведенного к якорю
, т. е. падение напряжения в цепи якоря достигает значения, равного половине напряжения, подведенного к якорю  . В этих условиях частота вращения двигателя достигает максимума nmax. При дальнейшем уменьшении потока
. В этих условиях частота вращения двигателя достигает максимума nmax. При дальнейшем уменьшении потока  частота вращения двигателя начинает убывать, так как из-за интенсивного роста тока Ia второе слагаемое выражения (29.9) нарастает быстрее первого.
частота вращения двигателя начинает убывать, так как из-за интенсивного роста тока Ia второе слагаемое выражения (29.9) нарастает быстрее первого.
При небольшом нагрузочном моменте на валу двигателя максимальная частота вращения nmax во много раз превосходит номинальную частоту вращения двигателя nном и является недопустимой по условиям механической прочности двигателя, т. е. может привести к его «разносу». Учитывая это, при выборе реостата rрег необходимо следить за тем, чтобы при полностью введенном его сопротивлении частота вращения двигателя не превысила допустимого значения.
Например, для двигателей серии 2П допускается превышение частоты вращения над номинальной не более чем в 2—3 раза. Необходимо также следить за надежностью электрических соединений в цепи обмотки возбуждения двигателя, так как при разрыве этой цепи магнитный поток уменьшается до значения потока остаточного магнетизма Фост, при котором частота вращения может достигнуть опасного значения.
Вид регулировочных характеристик n = f(Ф) зависит от значения нагрузочного момента M2 на валу двигателя: с ростом M2 максимальная частота вращения nmax уменьшается (рис. 29.5, б).
Рис. 29.5. Регулировочные характеристики двигателя независимого возбуждения
Недостаток рассмотренного способа регулирования частоты вращения состоит в том, что при изменении магнитного потока Ф меняется угол наклона механической характеристики двигателя.
Рассмотренный способ регулирования частоты вращения прост и экономичен, так как в двигателях независимого возбуждения ток IВ = (0,01 — 0,07)I а , а поэтому потери в регулировочном реостате  невелики.
невелики.
Однако диапазон регулирования обычно составляет nMAX/nMIN = 2 — 5. Объясняется это тем, что нижний предел частоты вращения обусловлен насыщением машины, ограничивающим значение магнитного потока Ф, а верхний предел частоты опасностью «разноса» двигателя и усилением влияния реакции якоря, искажающее действие которого при ослаблении основною магнитного потока Ф усиливается и ведет к искрению на коллекторе или же к появлению кругового огня.
Регулирование частоты вращения ДПТ НВ изменение напряжения в цепи якоря
Регулирование частоты вращения двигателя изменением питающего напряжения применяется лишь при IB = const, т. е. при раздельном питании цепей обмотки якоря и обмотки возбуждения при независимом возбуждении.
Частота вращения в режиме х.х. n0 пропорциональна напряжению, а  от напряжения не зависит, поэтому механические характеристики двигателя при изменении напряжения не меняют угла наклона к оси абсцисс, а смещаются по высоте, оставаясь параллельными друг другу (см. рис. 29.4, в). Для осуществления этого способа регулирования необходимо цепь якоря двигателя подключить к источнику питания с регулируемым напряжением. Для управления двигателями малой и средней мощности в качестве такого источника можно применить регулируемый выпрямитель, в котором напряжение постоянного тока меняется регулировочным автотрансформатором (АТ), включенным на входе выпрямителя (рис. 29.6,а).
от напряжения не зависит, поэтому механические характеристики двигателя при изменении напряжения не меняют угла наклона к оси абсцисс, а смещаются по высоте, оставаясь параллельными друг другу (см. рис. 29.4, в). Для осуществления этого способа регулирования необходимо цепь якоря двигателя подключить к источнику питания с регулируемым напряжением. Для управления двигателями малой и средней мощности в качестве такого источника можно применить регулируемый выпрямитель, в котором напряжение постоянного тока меняется регулировочным автотрансформатором (АТ), включенным на входе выпрямителя (рис. 29.6,а).
Для управления двигателями большой мощности целесообразно применять генератор постоянного тока независимого возбуждения; привод осуществляется посредством приводного двигателя (ПД), в качестве которого обычно используют трехфазный двигатель переменного тока. Для питания постоянным током цепей возбуждения генератора Г и двигателя Д используется возбудитель В — генератор постоянного тока, напряжение на выходе которого поддерживается неизменным. Описанная схема управления двигателем постоянного тока (рис. 29.6, б) известна под названием системы «генератор — двигатель» (Г—Д).

Рис. 29.6. Схемы включения двигателей постоянного тока при регулировании частоты вращения изменением напряжения в цепи якоря
Изменение напряжения в цепи якоря позволяет регулировать частоту вращения двигателя вниз от номинальной, так как напряжение свыше номинального недопустимо. При необходимости регулировать частоту вращения вверх от номинальной можно воспользоваться изменением тока возбуждения двигателя.
Изменение направления вращения (реверс) двигателя, работающего по системе Г—Д, осуществляется изменением направления тока в цепи возбуждения генератора Г переключателем П, т. е. переменой полярности напряжения на его зажимах. Если двигатель постоянного тока работает в условиях резко переменной нагрузки, то для смягчения колебаний мощности, потребляемой ПД из трехфазной сети, на вал ПД помещают маховик М, который запасает энергию в период уменьшения нагрузки на двигатель Д и отдает ее в период интенсивной нагрузки двигателя.
Регулирование частоты вращения изменением напряжения в цепи якоря обеспечивает плавное экономичное регулирование в широком диапазоне nMAX/nMIN ≥ 25 . Наибольшая частота вращения здесь ограничивается условиями коммутации, а наименьшая — условиями охлаждения двигателя.
Еще одним достоинством рассматриваемого способа регулирования является то, что он допускает безреостатный пуск двигателя при пониженном напряжении.
Импульсное регулирование частоты вращения ДПТ НВ
Сущность этого способа регулирования иллюстрируется схемой, изображенной на рис. 29.7, а. Цепь обмотки якоря двигателя параллельного (независимого) возбуждения периодически прерывается ключом К. Во время замыкания цепи якоря на время t к обмотке якоря подводится напряжение U = Uимпи ток в ней достигает значения Iamax. Затем ключом К цепь якоря размыкают и ток в ней убывает, достигая к моменту следующего замыкания цепи значения Iamin (при размыкании ключа К ток в обмотке якоря замыкается через диод VD). При следующем замыкании ключа К ток достигает значения Iamax и т. д. Таким образом, к обмотке якоря подводится некоторое среднее напряжение
где Т— отрезок времени между двумя следующими друг за другом импульсами напряжения (рис. 29.7, б);  — коэффициент управления.
— коэффициент управления.
При этом в обмотке якоря проходит ток, среднее значение которого  .
.
При импульсном регулировании частота вращения двигателя
Таким образом, импульсное регулирование частоты вращения аналогично регулированию изменением подводимого к цепи якоря напряжения. С целью уменьшения пульсаций тока в цепи якоря включена катушка индуктивности (дроссель)  , а частота подачи импульсов равна 200—400 Гц.
, а частота подачи импульсов равна 200—400 Гц.
На рис. 29.7, в представлена одна из возможных схем импульсного регулирования, где в качестве ключа применен управляемый диод — тиристор VS. Открывается тиристор подачей кратковременного импульса от генератора импульсов (ГИ) на управляющий электрод (УЭ) тиристора. Цепь L1C, шунтирующая тиристор, служит для запирания последнего в период между двумя управляющими импульсами. Происходит это следующим образом: при открывании тиристора конденсатор С перезаряжается через контур L1C и создает на силовых электродах тиристора напряжение, обратное напряжению сети, которое прекращает протекание тока через тиристор. Параметрами цепи L1C определяется время (с) открытого состояния тиристора:  . Здесь L1 выражается в генри (Гн); С — в фарадах (Ф).
. Здесь L1 выражается в генри (Гн); С — в фарадах (Ф).
Рис. 29.7. Импульсное регулирование частоты вращения двигателя постоянного тока
Значение среднего напряжения Uср регулируется изменением частоты следования управляющих импульсов от генератора импульсов на тиристор VS.
Жесткие механические характеристики и возможность плавного регулирования частоты вращения в широком диапазоне определили области применения двигателей независимого возбуждения в станочных приводах, вентиляторах, а также во многих других случаях регулируемого электропривода, где требуется устойчивая работа при колебаниях нагрузки.
Источник



