
- Контроль и регулирование основных технологических параметров: расхода, уровня, давления и температуры
- Автоматическое регулирование технологических процессов
- Технологические процессы и переменные процесса
- Принцип работы и элементы системы автоматического регулирования
- Виды систем автоматического регулирования
- Замкнутая система автоматического регулирования
- Разомкнутая система автоматического регулирования
- Методы автоматического регулирования
- Регулирование с обратной связью
- Регулирование с воздействием по возмущению
- Одноконтурные и многоконтурные системы регулирования
Контроль и регулирование основных технологических параметров: расхода, уровня, давления и температуры
 Совокупность единичных операций образует конкретные технологические процессы. В общем случае технологический процесс реализуется посредством технологических операций, которые выполняются параллельно, последовательно или комбинированно, когда начало последующей операции сдвинуто по отношению к началу предыдущей.
Совокупность единичных операций образует конкретные технологические процессы. В общем случае технологический процесс реализуется посредством технологических операций, которые выполняются параллельно, последовательно или комбинированно, когда начало последующей операции сдвинуто по отношению к началу предыдущей.
Управление технологическим процессом представляет собой организационно-техническую задачу, и решают ее сегодня, создавая автоматические или автоматизированные системы управления технологическим процессом.
Целью управления технологическим процессом может быть: стабилизация некоторой физической величины, изменение ее по заданной программе или, в более сложных случаях, оптимизация некоторого обобщающего критерия , наибольшая производительность процесса, наименьшая себестоимость продукта и т. д.
К числу типовых технологических параметров, подлежащих контролю и регулированию, относят расход, уровень, давление, температуру и ряд показателей качества.
Замкнутые системы используют текущую информацию о выходных величинах, определяют отклонение ε( t) управляемой величины Y(t) от ее заданного значения Y(o) и принимают действия к уменьшению или полному исключению ε ( t ).
Простейшим примером замкнутой системы, называемой системой регулирования по отклонению, служит показанная на рисунке 1 система стабилизации уровня воды в баке. Система состоит из измерительного преобразователя (датчика) 2 уровня, устройства 1 управления (регулятора) и исполнительного механизма 3, управляющего положением регулирующего органа (клапана) 5.
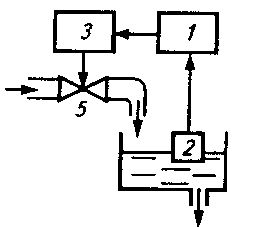
Рис. 1. Функциональная схема автоматической системы управления: 1 — регулятор, 2 — измерительный преобразователь уровня, 3 — исполнительный механизм, 5 — регулирующий орган.
Системы регулирования расхода характеризуются малой инерционностью и частой пульсацией параметра.
Обычно управление расходом — это дросселирование потока вещества с помощью клапана или шибера, изменение напора в трубопроводе за счет изменения частоты вращения привода насоса или степени байпасирования (отведения части потока через дополнительные каналы).
Принципы реализации регуляторов расхода жидких и газообразных сред показаны на рисунке 2, а, сыпучих материалов — на рисунке 2, б.
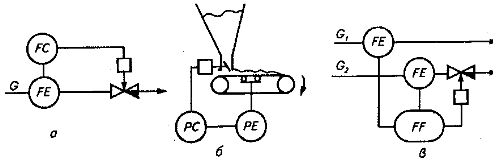
Рис. 2. Схемы регулирования расхода: а — жидких и газообразных сред, б — сыпучих материалов, в — соотношения сред.
В практике автоматизации технологических процессов встречаются случаи, когда требуется стабилизация соотношения расходов двух или более сред.
В схеме, показанной на рисунке 2, в, поток к G1 — ведущий, а поток G2 = γ G — ведомый, где γ — коэффициент соотношения расходов, который устанавливают в процессе статической настройки регулятора.
При изменении ведущего потока G1 регулятор FF пропорционально изменяет ведомый поток G2.
Выбор закона регулирования зависит от требуемого качества стабилизации параметра.
Системы регулирования уровня имеют те же особенности, что и системы регулирования расхода. В общем случае поведение уровня описывается дифференциальным уравнением
D(dl/dt) = G вх — G вых + G обр,
где S — площадь горизонтального сечения емкости, L — уровень, Gвх, G вых — расход среды на входе и выходе, G обр — количество среды, увеличивающейся или уменьшающейся в емкости (может быть равно 0) в единицу времени t .
Постоянство уровня свидетельствует о равенстве количеств подаваемой и расходуемой жидкости. Это условие может быть обеспечено воздействием на подачу (рис. 3, а) или расход (рис. 3, б) жидкости. В варианте регулятора, показанном на рисунке 3, в, используют для стабилизации параметра результаты измерений подачи и расхода жидкости.
Импульс по уровню жидкости — корректирующий, он исключает накопление ошибки вследствие неизбежных погрешностей, возникающих при изменении подачи и расхода. Выбор закона регулирования также зависит от требуемого качества стабилизации параметра. При этом возможно использование не только пропорциональных, но также и позиционных регуляторов.
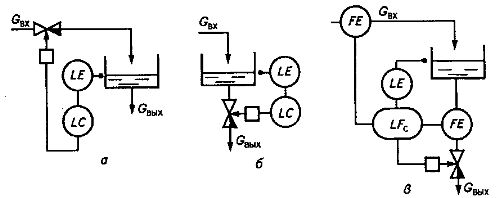
Рис. 3. Схемы систем регулирования уровня: а — с воздействием на подачу, б и в — с воздействием на расход среды.
Постоянство давления, как и постоянство уровня, свидетельствует о материальном балансе объекта. В общем случае изменение давления описывается уравнением:
V(dp/dt) = G вх — G вых + G обр,
где V — объем аппарата, р — давление.
Способы регулирования давления аналогичны способам регулирования уровня.
Температура — показатель термодинамического состояния системы. Динамические характеристики системы регулирования температуры зависят от физико-химических параметров процесса и конструкции аппарата. Особенность такой системы — значительная инерционность объекта и нередко измерительного преобразователя.
Принципы реализации регуляторов температуры аналогичны принципам реализации регуляторов уровня (рис. 2) с учетом управления расходом энергии в объекте. Выбор закона регулирования зависит от инерционности объекта: чем она больше, тем закон регулирования сложнее. Постоянная времени измерительного преобразователя может быть снижена за счет увеличения скорости движения теплоносителя, уменьшения толщины стенок защитного чехла (гильзы) и т. д.
Регулирование параметров состава и качества продукта
При регулировании состава или качества продукта возможна ситуация, когда параметр (например, влажность зерна) измеряют дискретно. В этой ситуации неизбежны потеря информации и снижение точности динамического процесса регулирования.
Рекомендуемая схема регулятора, стабилизирующего некоторый промежуточный параметр Y(t), значение которого зависит от основного регулируемого параметра — показателя качества продукта Y(t i ), показана на рисунке 4.
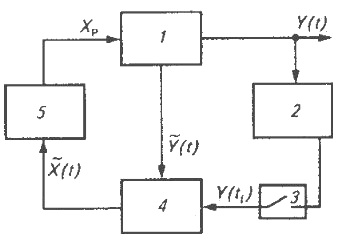
Рис. 4. Схема системы регулирования качества продукта: 1 — объект, 2— анализатор качества, 3 — экстраполяционный фильтр, 4 — вычислительное устройство, 5 — регулятор.
Вычислительное устройство 4, используя математическую модель связи между параметрами Y(t) и Y(t i ), непрерывно оценивает показатель качества. Экстраполяционный фильтр 3 выдает оценочный параметр качества продукта Y(t i ) в промежутках между двумя измерениями.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Автоматическое регулирование технологических процессов
Автоматическое регулирование — это управление технологическими процессами при помощи продвинутых устройств с заранее определенными алгоритмами.
В быту, например, автоматическое регулирование может осуществляться при помощи термостата, который измеряет и поддерживает комнатную температуру на заданном уровне.
 Автоматическое регулирование
Автоматическое регулирование
После того, как желательная температура задана, термостат автоматически контролирует комнатную температуру и включает или отключает нагреватель или воздушный кондиционер по мере необходимости, чтобы поддержать заданную температуру.
На производстве управление процессами обычно осуществляется средствами КИП и А, которые измеряют и поддерживают на необходимом уровне технологические параметры процесса, такие как: температура, давление, уровень и расход. Ручное регулирование на более-менее масштабном производстве затруднительно по ряду причин, а многие процессы вообще невозможно регулировать вручную.
Технологические процессы и переменные процесса
Для нормального выполнения технологических процессов необходимо контролировать физические условия их протекания. Такие физические параметры, как температура, давление, уровень и расход могут изменяться по многим причинам, и их изменения влияют на технологический процесс. Эти изменяемые физические условия называются «переменными процесса».
Некоторые из них могут понизить эффективность производства и увеличить производственные затраты. Задачей системы автоматического регулирования является минимизация производственных потерь и затрат на регулирование, связанных с произвольным изменением переменных процесса.
На любом производстве осуществляется воздействие на сырьё и другие исходные компоненты для получения целевого продукта. Эффективность и экономичность работы любого производства зависит от того, как технологические процессы и переменные процесса управляются посредством специальных систем регулирования.
На тепловой электростанции, работающей на угле, уголь размалывается и затем сжигается, чтобы произвести тепло, необходимое для преобразования воды в пар. Пар может использоваться по множеству назначений: для работы паровых турбин, тепловой обработки или сушки сырых материалов. Ряд операций, которые эти материалы и вещества проходят, называется «технологическим процессом». Слово «процесс» также часто используется по отношению к индивидуальным операциям. Например, операция по размолу угля или превращения воды в пар могла бы называться процессом.
Принцип работы и элементы системы автоматического регулирования
В случае системы автоматического регулирования наблюдение и регулирование производится автоматически при помощи заранее настроенных приборов. Аппаратура способна выполнять все действия быстрее и точнее, чем в случае ручного регулирования.
Действие системы может быть разделено на две части: система определяет изменение значения переменной процесса и затем производит корректирующее воздействие, вынуждающее переменную процесса вернуться к заданному значению.
Система автоматического регулирования содержит четыре основных элемента: первичный элемент, измерительный элемент, регулирующий элемент и конечный элемент.
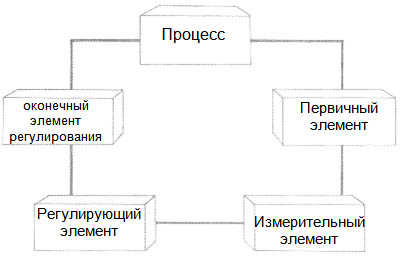 Элементы системы автоматического регулирования
Элементы системы автоматического регулирования
Первичный элемент воспринимает величину переменной процесса и превращает его в физическую величину, которое передается в измерительный элемент. Измерительный элемент преобразовывает физическое изменение, произведенное первичным элементом, в сигнал, представляющий величину переменной процесса.
Выходной сигнал от измерительного элемента посылается к регулирующему элементу. Регулирующий элемент сравнивает сигнал от измерительного элемента с опорным сигналом, который представляет собой заданное значение и вычисляет разницу между этими двумя сигналами. Затем регулирующий элемент производит корректирующий сигнал, который представляет собой разницу между действительной величиной переменной процесса и ее заданным значением.
Выходной сигнал от регулирующего элемента посылается к конечному элементу регулирования. Конечный элемент регулирования преобразовывает получаемый им сигнал в корректирующее воздействие, которое вынуждает переменную процесса возвратиться к заданному значению.
В дополнение к четырем основным элементам, системы регулирования процессами могут иметь вспомогательное оборудование, которое обеспечивает информацией о величине переменной процесса. Это оборудование может включать такие приборы как самописцы, измерители и устройства сигнализации.
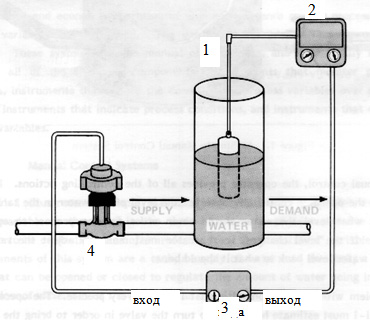 Схема простой системы автоматического регулирования
Схема простой системы автоматического регулирования
Виды систем автоматического регулирования
Имеются два основных вида автоматических систем регулирования: замкнутые и разомкнутые, которые различаются по своим характеристикам и следовательно — по уместности применения.
Замкнутая система автоматического регулирования
В замкнутой системе информация о значении регулируемой переменной процесса проходит через всю цепочку приборов и устройств, предназначенных для контроля и регулирования этой переменной. Таким образом, в замкнутой системе производится постоянное измерение регулируемой величины, её сравнение с задающей величиной и оказывается соответствующее воздействие на процесс для приведения регулируемой величины в соответствие с задающей величиной.
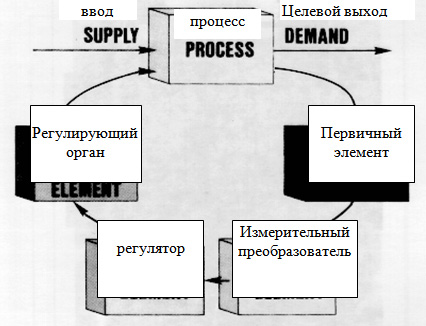 Схема замкнутой системы автоматического регулирования
Схема замкнутой системы автоматического регулирования
Например, подобная система хорошо подходит для контроля и поддержания необходимого уровня жидкости в резервуаре. Буек воспринимает изменение уровня жидкости. Измерительный преобразователь преобразует изменения уровня в сигнал, который отправляет на регулятор. Который, в свою очередь, сравнивает полученный сигнал с необходимым уровнем, заданным заранее. После регулятор вырабатывает корректирующий сигнал и отправляет его на регулирующий клапан, который корректирует поток воды.
Разомкнутая система автоматического регулирования
В разомкнутой системе нет замкнутой цепочки измерительных и обрабатывающих сигнал приборов и устройств от выхода до входа процесса, и воздействие регулятора на процесс не зависит от результирующего значения регулируемой переменной. Здесь не производится сравнение между текущим и желаемым значением переменной процесса и не вырабатывается корректирующее воздействие.
 Схема разомкнутой системы автоматического регулирования
Схема разомкнутой системы автоматического регулирования
Один из примеров разомкнутой системы регулирования — автоматическая мойка автомобилей. Это технологический процесс по мойке автомобилей и все необходимые операции чётко определены. Когда автомобиль выходит с мойки предполагается, что он должен быть чистым. Если автомобиль недостаточно чист, то система этого не обнаруживает. Здесь нет никакого элемента, который бы давал информацию об этом и корректировал процесс.
На производстве некоторые разомкнутые системы используют таймеры, чтобы гарантировать, что ряд последовательных операций выполнен. Этот вид разомкнутого регулирования может быть приемлем, если процесс не очень ответственный. Однако, если процесс требует, чтобы выполнение некоторых условий было проверено и при необходимости были бы сделаны корректировки, разомкнутая система не приемлема. В таких ситуациях необходимо применить замкнутую систему.
Методы автоматического регулирования
Системы автоматического регулирования могут создаваться на основе двух основных методов регулирования: регулирования с обратной связью, которое работает путем исправления отклонений переменной процесса после того, как они произошли; и с воздействием по возмущению, которое предотвращает возникновение отклонений переменной процесса.
Регулирование с обратной связью
Регулирование с обратной связью — это такой способ автоматического регулирования, когда измеренное значение переменной процесса сравнивается с ее уставкой срабатывания и предпринимаются действия для исправления любого отклонения переменной от заданного значения.
 Система ручного регулирования с обратной связью
Система ручного регулирования с обратной связью
Основным недостатком системы регулирования с обратной связью является то, что она не начинает регулировки процесса до тех пор, пока не произойдет отклонение регулируемой переменной процесса от значения ее уставки.
Температура должна измениться, прежде чем регулирующая система начнет открывать или закрывать управляющий клапан на линии пара. В большинстве систем регулирования такой тип регулирующего действия приемлем и заложен в конструкцию системы.
В некоторых промышленных процессах, таких как изготовление лекарственных препаратов, нельзя допустить отклонение переменной процесса от значения уставки. Любое отклонение может привести к потере продукта. В этом случае необходима система регулирования, которая бы предвосхищала изменения процесса. Такой упреждающий тип регулирования обеспечивается системой регулирования с воздействием по возмущению.
Регулирование с воздействием по возмущению
Регулирование по возмущению — это регулирование с опережением, потому что прогнозируется ожидаемое изменение в регулируемой переменной и принимаются меры прежде, чем это изменение происходит.
Это фундаментальное различие между регулированием с воздействием по возмущению и регулированием с обратной связью. Контур регулирования с воздействием по возмущению пытается нейтрализовать возмущение прежде, чем оно изменит регулируемую переменную, в то время, как контур регулирования с обратной связью пытается отрабатывать возмущение после того, как оно воздействует на регулируемую переменную.
 Система регулирования с воздействием по возмущению
Система регулирования с воздействием по возмущению
Система регулирования с воздействием по возмущению имеет очевидное преимущество перед системой регулирования с обратной связью. При регулировании по возмущению в идеальном случае величина регулируемой переменной не изменяется, она остается на значении ее уставки. Но ручное регулирование по возмущению требует более сложного понимания того влияния, которое возмущение окажет на регулируемую переменную, а также использования более сложных и точных приборов.
На заводе редко можно встретить чистую систему регулирования по возмущению. Когда используется система регулирования по возмущению, она обычно сочетается с системой регулирования с обратной связью. И даже в этом случае регулирование по возмущению предназначается только для более ответственных операций, которые требуют очень точного регулирования.
Одноконтурные и многоконтурные системы регулирования
Одноконтурная система регулирования или простой контур регулирования — это система регулирования с одним контуром, который обычно содержит только один первичный чувствительный элемент и обеспечивает обработку только одного входного сигнала на регулятор.
 Одноконтурная система регулирования
Одноконтурная система регулирования
Некоторые системы регулирования имеют два или больше первичных элемента и обрабатывают больше, чем один входной сигнал на регулятор. Эти системы автоматического регулирования называются «многоконтурными» системами регулирования.
 Многоконтурная система регулирования
Многоконтурная система регулирования
Источник



