
Регулирование скорости двигателей постоянного тока




![]()
![]()
Способы регулирования скорости двигателей постоянного тока можно определить, рассматривая уравнение механической характеристики:
 .
.
Для двигателя независимого возбуждения возможны три способа регулирования:
Изменение питающего напряжения U. При этом способе изменяется скорость идеального холостого хода  , а наклон механической характеристики не изменяется. Это наиболее эффективный способ регулирования, так как он обеспечивает наибольший диапазон регулирования (wмин / wмакс) и лучшие энергетические характеристики (к. п. д.). Регулирование происходит плавно, то есть точность регулирования может быть очень высока. Этот метод имеет один недостаток – требуется регулируемый источник питания в цепи якоря. Механические характеристики двигателя при этом способе регулирования приведены на рисунке 6.4, а.
, а наклон механической характеристики не изменяется. Это наиболее эффективный способ регулирования, так как он обеспечивает наибольший диапазон регулирования (wмин / wмакс) и лучшие энергетические характеристики (к. п. д.). Регулирование происходит плавно, то есть точность регулирования может быть очень высока. Этот метод имеет один недостаток – требуется регулируемый источник питания в цепи якоря. Механические характеристики двигателя при этом способе регулирования приведены на рисунке 6.4, а.
Рисунок 6.4 — Механические характеристики двигателя независимого возбуждения при регулировании скорости за счет изменения питающего напряжения (а), реостатном регулировании (б) и регулировании за счет ослабления магнитного потока (в)
Изменение сопротивления якорной цепи rЯ. При этом скорость идеального холостого хода остается постоянной, а изменяется угол наклона механической характеристики. Регулирование происходит ступенчато, точность регулирования зависит от числа ступеней реостата в якорной цепи. Энергетическая эффективность при таком способе невелика, так как значительная мощность рассеивается на сопротивлении реостата. Механические характеристики двигателя при этом способе регулирования приведены на рисунке 6.4, б.
Изменение магнитного потока машины Ф.Изменение магнитного потока происходит за счет регулирования тока возбуждения двигателя. Так как ток возбуждения двигателя значительно меньше тока якоря, то реализовать этот способ легче реализовать, чем первый, так как регулируемые источники питания малой мощности достаточно просты и доступны. Однако практически все машины постоянного тока в номинальном режиме работают при насыщенной магнитной системе. То есть при увеличении тока возбуждения магнитный поток будет возрастать очень незначительно, в то время как ток возбуждения может достигнуть недопустимых значений. Поэтому изменение магнитного потока машины можно производить только в сторону ослабления поля. При этом скорость будет возрастать выше основной, а характеристики иметь вид аналогичный характеристикам двигателя последовательного возбуждения (рисунок 6.4, в). Этот способ зачастую применяется в комбинации с первым для расширения диапазона регулирования.
Источник
Регулирование скорости оборотов двигателя постоянного тока
С точки зрения регулирования скоростью вращения электродвигателей, интересно уравнение для электромеханических характеристик, соответствующее Второму закону Кирхгофа:
ω = U/C×Φ – ΥЯ /( C×Φ) 3 ×M
При описании технических характеристик электродвигателя скорость, выражаемая оборотами в минуту, зачастую называется частотой вращения ν по известному соотношению:
ω = 2p/T = 2pn
Поэтому эти две разноименные величины часто применяются в одном и том же смысле. Скорость w (частота ν) находится в прямой зависимости от напряжения питания U и в обратной от магнитного потока Ф. Исходя из приведенной выше формулы, возникает вывод, что скоростью можно управлять, регулируя сопротивление якоря, магнитный поток и напряжение питания.

Методы регулировки
Итак, различают три основных варианта регулирования скоростью:
- Изменением напряжения сети. Меняя подводимое питание можно управлять частотой вращения двигателя;
- Добавлением пускового реостата в цепь якоря. Регулируя сопротивление, можно уменьшить скорость вращения;
- Управлением магнитного потока. Двигатели с электромагнитами дают возможность регулировать поток путем изменения тока возбуждения. Однако нижний предел ν min ограничен насыщением магнитной цепи двигателя, что не позволяет увеличивать в большой степени магнитный поток.
К каждому из вариантов соответствует определённая зависимость механических характеристик.
Методы регулирования применительны к двигателям с различными:
- типами возбуждения;
- величиной мощности.
На практике в современных электрических моторах, в связи с недостатками и ограниченности диапазонов, рассмотренные методы не всегда применяются.
Это еще связано с тем, что машины отличаются довольно небольшими КПД, и к тому же не позволяют плавно увеличивать или уменьшать частоту вращения.
Электронные же схемы управления с регуляторами частоты, работающими от аккумуляторной батареи на 12 В, напротив, широко используются. Например, они очень актуальны для управления низковольтными электродвигателями 12 вольт в приборах автоматики, детских игрушках, электрических велосипедах, аккумуляторных детских автомобилях.

Принципиальной особенностью метода является то, что ток в цепи якоря и момент, развиваемый электродвигателем, зависят лишь от величины нагрузки на его валу. Регулировка осуществляется с помощью регулятора оборотов электродвигателя.
В течение очень долгого времени тиристорные преобразователи являлись единственным коммерчески доступными регуляторами двигателей. К слову сказать, они по-прежнему самые распространенные на сегодняшний день. Однако с появлением силовых транзисторов стали наиболее популярными регуляторы оборотов двигателя постоянного тока с широтно-импульсной модуляцией. Приведём для примера ниже схему, работающую от источника постоянного тока 12 В.
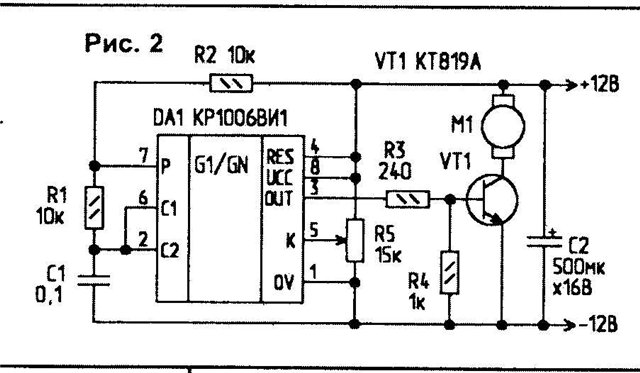
Схема на практике даёт возможность, к примеру, увеличивать либо уменьшать яркость свечения ламп накаливания на 12 вольт.
Последовательно-параллельное управление используется в ситуациях, когда два или более агрегата постоянного тока соединены механически. Схема с последовательным соединением электродвигателей, в которой общее напряжение делится на всех, используется для низкоскоростных приложений. Схема с параллельным соединением машин, имеющих одинаковое напряжение, используется в высокоскоростных применениях.
Заключение
Рассмотренный метод регулировки напряжения сети считается самым эффективным и экономичным вариантом, так как:
- им обеспечивается широкий диапазон изменения скоростей (wmin / wmax) и лучшие энергетические характеристики (КПД);
- он работает без каких-либо потерь мощности в силовой цепи якоря.
Управление осуществляется плавно, и по точности регулировка частоты вращения является весьма высокой.
Источник
Регулирование скорости вращения ДПТ
Из выражения механической характеристики (71)  следует, что возможны три способа регулирования скорости вращения:
следует, что возможны три способа регулирования скорости вращения:
1) изменением магнитного потока главных полюсов;
2) изменением сопротивления цепи якоря;
3) регулированием напряжения питающей сети.
 Рассмотрим регулирование скорости для двигателя параллельного возбуждения (рис.25).
Рассмотрим регулирование скорости для двигателя параллельного возбуждения (рис.25).
Рис. 25. Схема включения ДПТ параллельного возбуждения
Механическая характеристика двигателя, снятая при неизменных номинальных значениях напряжения, тока и при номинальных значениях всех сопротивлений, называется естественной механической характеристикой. В противном случае – искусственной.
Для двигателя параллельного возбуждения механическая характеристика имеет вид линейной зависимости:
 , (77)
, (77)
где  и
и  .
.
Рассмотрим все способы регулирования скорости вращения ДПТ.
1) Изменением магнитного потока.
Для изменения магнитного потока требуется изменять ток возбуждения. Для изменения тока возбуждения последовательно с обмоткой возбуждения (ОВ) включается регулировочный реостат, который может увеличивать сопротивление ОВ по отношению к номинальному значению, а значит только уменьшать ток и магнитный поток Ф. Тогда получается:

В выражении механической характеристики коэффициенты n0 и b будут при этом возрастать. На рис. 26 возросшим значениям магнитного потока соответствуют искусственные характеристики 1 и 2. Из характеристик следует, что изменением магнитного потока можно только увеличивать скорость вращения двигателя по сравнению с номинальной  .
.
2) Изменением сопротивления цепи якоря.
Изменение сопротивления цепи якоря  может осуществляться только в сторону увеличения сопротивления. Это можно сделать, включив последовательно с якорем регулировочный реостат.
может осуществляться только в сторону увеличения сопротивления. Это можно сделать, включив последовательно с якорем регулировочный реостат.
Тогда общее сопротивление цепи якоря может только возрасти
 (из- за последовательного соединения реостата), а, значит, возрастает коэффициент b при постоянном значении n0:
(из- за последовательного соединения реостата), а, значит, возрастает коэффициент b при постоянном значении n0:
 .
.
Характеристики, соответствующие этому способу регулирования показаны на рис. 26. (линии 3, 4, 5).
Из характеристик следует, что изменением сопротивления якоря можно только уменьшать скорость вращения по сравнению с .
3) Изменением напряжения питающей сети.
Регулирование напряжения сети осуществляется с помощью регуляторов (например, тиристорных), и поэтому данный способ регулирования применяется в тех случаях, когда требуется специальное управление каким-либо технологическим процессом. В этом случае:
 изменяется, а
изменяется, а  .
.
На рис. 26 такому способу регулирования соответствует характеристика 7.

Рис. 26. Регулировочные характеристики ДПТ
Вопросы для самопроверки
1. Для чего предназначены машины постоянного тока (МПТ)?
2. Для чего предназначен коллектор машины?
3. Какой обмоткой создается магнитное поле МПТ?
4. Какой физический закон лежит в основе принципа работы генератора постоянного тока?
5. Как создается магнитный момент в машине?
6. Запишите выражение ЭДС МПТ и поясните, какие величины в него входят.
7. Запишите выражение электромагнитного вращающего момента МПТ и поясните, какие величины в него входят.
8. Виды потерь в машине постоянного тока.
9. Определение коэффициента полезного действия машины. Зависимость КПД от нагрузки.
10. Способы возбуждения в МПТ. Схемы и определения.
11. Что такое реакция якоря в МПТ, каковы ее последствия и способы снижения ее влияния?
12. Запишите основные уравнения, определяющие работу двигателя постоянного тока.
13. Определение, аналитическое выражение и вид механической характеристики двигателей различного типа возбуждения.
14. Условия пуска двигателя постоянного тока.
15. Проблемы пуска двигателя постоянного тока (ДПТ).
16. Как ограничивают пусковой ток в ДПТ?
17. Перечислите способы регулирования скорости вращения ДПТ.
18. Как регулируется скорость вращения двигателя за счет изменения магнитного потока главных полюсов?
19. Как регулируется скорость вращения двигателя постоянного тока при изменении сопротивления цепи якоря?
Задача 2.Двигатель постоянного тока параллельного возбуждения имеет следующие данные: номинальная мощность  , напряжение питания
, напряжение питания  номинальная скорость вращения n
номинальная скорость вращения n  , сопротивление цепи якоря
, сопротивление цепи якоря  ,сопротивление цепи возбуждения
,сопротивление цепи возбуждения  ,номинальный коэффициент полезного действия
,номинальный коэффициент полезного действия  .
.
1.Номинальный ток, потребляемый двигателем, номинальный ток якоря и ток возбуждения.
2. Сопротивление пускового реостата  , при котором начальный пусковой ток в цепи якоря составлял 2,5
, при котором начальный пусковой ток в цепи якоря составлял 2,5  .
.
3. Начальный пусковой момент двигателя при заданной кратности пускового тока.
4. Номинальный вращающий момент двигателя.
5. Построить в одной системе координат естественную механическую характеристику и искусственную (при введении пускового реостата ) механическую характеристику. Определить диапазон изменения частоты вращения при номинальной нагрузке.
Таблица 2 Тип двигателя и его данные
| Тип двигателя | | | n |  | | |
| кВт | В | об/мин | % | Ом | Ом | |
| 2ПН225МУХЛ4 | 79,5 | 0,202 | 62,25 |
Решение
1. Номинальный ток двигателя, номинальный ток якоря и обмотки возбуждения.
Номинальный ток двигателя определяется из соотношений:  ;
; 
Отсюда номинальный ток двигателя: 
Номинальный ток возбуждения:

В двигателе параллельного возбуждения токи связны уравнением (рис. 25):  , где
, где  — номинальные токи обмотки якоря и возбуждения соответственно.
— номинальные токи обмотки якоря и возбуждения соответственно.
Тогда: 
2. Сопротивление пускового реостата  , при котором начальный пусковой ток цепи якоря составляет
, при котором начальный пусковой ток цепи якоря составляет  .
.
Пусковой ток двигателя при наличии реостата в цепи якоря равен:
 откуда
откуда 
По условию  , следовательно:
, следовательно:

3. Начальный пусковой момент двигателя при заданной кратности пускового тока.
Заданная кратность пускового тока .
В двигателе постоянного тока параллельного возбуждения момент
 Так как
Так как  при изменении сопротивления цепи якоря, а
при изменении сопротивления цепи якоря, а  , то момент пропорционален току якоря.
, то момент пропорционален току якоря.
Тогда можно записать 
Отсюда пусковой момент:

 – номинальный момент двигателя.
– номинальный момент двигателя.
Номинальный момент двигателя определим из следующих соображений. Так как из (69)  , и из (52) и (53)
, и из (52) и (53)  и
и  , можно записать
, можно записать  откуда
откуда 
Тогда для номинального момента


4. Естественная механическая характеристика двигателя.
Механическая характеристика линейна, поэтому для ее построения достаточно определить координаты 2-х точек.
Координаты одной точки уже определены: (  ). То есть (175,1Н·м; 600 об/мин).
). То есть (175,1Н·м; 600 об/мин).
Вторая точка соответствует холостому ходу двигателя, т.е. при М=0.
Из уравнения механической характеристики следует, что скорость холостого хода равна 
В номинальном режиме:
 и
и 
Тогда 
Рассмотрим отношение:  , откуда
, откуда

Механическая характеристика строится по точкам:
(175,1Н·м; 600 об/мин) и (0; 634,6 об/мин) ( рис.27).
5. Искусственная механическая характеристика при введении пускового реостата  в одной системе координат с естественной (п.4).
в одной системе координат с естественной (п.4).
Искусственная механическая характеристика также линейна. Кроме того, скорость холостого хода  при номинальном напряжении сети
при номинальном напряжении сети  не зависит от значения сопротивления цепи якоря. То есть одна точка, соответствующая холостому ходу двигателя, остается от предыдущего расчета.
не зависит от значения сопротивления цепи якоря. То есть одна точка, соответствующая холостому ходу двигателя, остается от предыдущего расчета.
Для определения второй точки искусственной характеристики воспользуемся выражениями
 и
и 
где  – скорость двигателя при введении пускового реостата.
– скорость двигателя при введении пускового реостата.
Отсюда: 


6. Диапазон изменения скорости при номинальной нагрузке.
 Диапазон определяется из графика (рис.27): от (380,8 до 600) об/мин.
Диапазон определяется из графика (рис.27): от (380,8 до 600) об/мин.
Рис. 27. Механические характеристики двигателя
Источник



