
Пуск и регулирование скорости ЭПС переменного тока




![]()
![]()
Наряду с системой постоянного тока широко применяется перспективная система однофазного переменного тока промышленной частоты (50 Гц) с напряжением в контактной сети 25000 В. Это позволяет, по отношению к системе постоянного напряжения, снизить токи потребляемые электровозами и электропоездами, а следовательно, уменьшить сечение проводов контактной сети и увеличить расстояние между тяговыми подстанциями до 40 – 60 км.
На ЭПС однофазно – переменного тока устройством преобразования электрической энергии являются статические преобразователи, состоящие из понижающих напряжение трансформаторов, полупроводниковых выпрямителей и аппаратуры управления ими.
Основным способом регулирования скорости движения электровозов и моторных вагонов служит изменение напряжения выпрямленного тока, подводимого к ТЭД. Выпрямленное напряжение регулируют путем переключения витков обмоток на стороне высокого или низкого напряжения тягового трансформатора.
Рассмотрим принципиальную схему регулирования на стороне низкого напряжения путем секционирования и переключения секций вторичной обмотки тягового трансформатора.
| 25 кВ |
| Т |
| ВН |
| НН |
| LП |
| Ld |
| V |
| V |
| V |
| V |
| М |
| ОВ |
| RШ |
| Подключая диодный выпрямитель V к соответствующим выводам этой обмотки, изменяют напряжение, подводимое к тяговым двигателям от минимального |
| DU |
| DU |
| DU |
| I |
гателям, от минимального значения до полного при подключении всей вторичной обмотки.
Переход с одной ступени регулирования на другую осуществляется с помощью контакторов 1 – 8 и переходного реактора LП. На первой позиции включены контакторы 1 и 2. При переходе на вторую позицию отключают контактор 1 и включают контактор 3. Затем отключают контактор 2 и включают контактор 4. При этом переход с одной позиции на другую происходит без разрыва тока.
Рассмотрим теперь силовую цепь тягового электропривода с регулированием на стороне высокого напряжения.
| Т |
| I |
| V |
| V |
| V |
| М |
| ОВ |
| RШ |
| Ld |
| 25 кВ |
| РО |
| ВН |
| НН |
| Регулировочная обмотка (РО) высокого напряжения представляет собой автотрансформатор с большим числом выводов, к которым подключают дополнительную несекционированную обмотку высокого напряжения (ВН). Переключая несекционированную обмотку ВН с одного вывода обмотки РО на другой, изменяют напряжение на вторичной обмотке низкого напряжения (НН) трансформатора. Резистор RШ, постоянно шунтирующий обмотку возбуждения ТЭД, предназначен для снижения пульсаций магнитного потока, которые ухудшают коммутацию и увеличивают магнитные потери. Пульсации выпрямленного тока частично сглаживает мощный индуктивный реактор Ld, так что выпрямленный ток является не постоянным, а пульсирующим, что снижает к.п.д. ТЭД, рассчитанного на пульсацию тока до 30%. |
| V |
| VS |
| VS |
| VS |
| VS |
Если вместо неуправляемого диодного выпрямителя V применить управляемый тиристорный выпрямитель VS, то напряжение, подводимое к ТЭД можно плавно регулировать.
| T/2 |
| t |
| t |
| t |
| U |
| UВ |
| UВСР |
| UВСР |
| UВ |
| UВ |
| UВ |
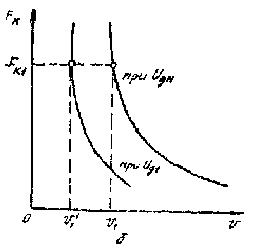
| На рисунке показаны синусоидальное изменение напряжения U на вторичной (НН) обмотке трансформатора и выпрямленное напряжение UВ во времени при различных углах отпирания . |
Если то тиристоры вообще не будут отпираться и выпрямленное напряжение на ТЭД будет равно нулю. С уменьшением угла отпирания начинает увеличиваться выпрямленное среднее за период напряжение UВСР на тяговых двигателях. При тиристоры будут полностью открыты и будут работать как обычные диоды, а выпрямленное напряжение UВи средняя его величина UВСРбудут наибольшими.
Каждому значению среднего напряжения соответствуют скоростные характеристики, имеющие обычный вид и которые могут занимать любое место в системе координат V(I).
Источник
Регулирование скорости движения на ЭПС
Из предыдущего следует, что каждому значению силы тяги соответствует одна (и только одна) скорость движения поезда определенной массы на конкретном элементе профиля пути. Поэтому наличие одной тяговой характеристики не позволяет выбрать необходимую по условиям движения скорость. Необходимость же иметь такой выбор очевидна. Она вытекает из того, что профиль пути постоянно изменяется, изменяется и сопротивление движению, а движение поезда необходимо обеспечить с установленной скоростью, предусмотренной графиком. Поезда, следующие по участку, имеют различную массу, а следовательно, и значения сопротивления движению у них разные. При этом каждый поезд необходимо вести с определенной скоростью.
При наличии одной тяговой характеристики, соответствующей номинальному напряжению UД.Н, невозможно произвести пуск электровоза. Это следует из рис. 4.34: тяговая характеристика 1 не пересекает оси ординат, то есть сила тяги при V = 0 бесконечно велика и не может быть реализована.
Задача управления ЭПС сводится, таким образом, к выбору необходимого режима движения и осуществлению пуска ЭПС. Следовательно, необходимо иметь несколько тяговых характеристик. Получение «семейства» их, в принципе, возможно путем изменения величин, входящих в уравнения (4.68) и (4.72), а следовательно, влияющих на расположение тяговой характеристики в системе координат FK—v.
При этом следует иметь в виду, что величину тока произвольно изменять нельзя, так как его значение однозначно определяется противоЭДС, приложенный напряжением и сопротивлением обмоток двигателя.
4.8.2. Способы регулирования скорости движения
В формулы, определяющие значения силы тяги (4.68) и скорости движения (4.72) при определенном токе» входит ряд величин, часть из которых изменить в процессе движения невозможно. К ним относятся: постоянные КМБ CVи CF сопротивление обмоток ТД rД и КПД ηМи ηЗ.П .
Для получения нескольких тяговых; характеристик могут быть использованы при возможности:
1) изменение напряжения, подведённого к ТД, — UД;
2) включение последовательно в цепь ТД добавочного резистора R;
3) изменение величины магнитного потока Ф при неизменном токе якоря.
Все указанные возможности нашли практическое использование на ЭПС постоянного и переменного тока.
4.8.3. Регулирование скорости движения .изменением напряжения, подведенного к ТД
Допустим, что скоростная характеристика ТД при номинальном напряжении UД.Н имеет вид, представленный на рис. 4.39, а кривой 1. При некотором значении тока IД1 скорость движения
 . (4.80)
. (4.80)
При другой величине напряжения  и том же токе
и том же токе
 . (4.81)
. (4.81)
Поделив (4.80) на (4.81), получим
 .
.
При одинаковых токах магнитные потоки будут равны, следовательно,
 . (4.82)
. (4.82)
Или пренебрегая незначительной величиной потери напряжения IЯrД по отношению к UД, получим
 |
 . (4.83)
. (4.83)
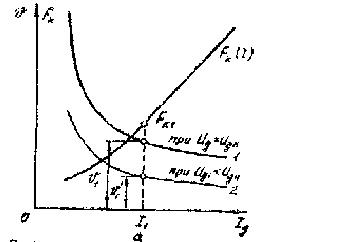
Рис. 4.35
Выполняя аналогичные расчеты для других значений тока, получим «семейство» точек, а соединив их плавной кривой— скоростную характеристику при новом значении напряжения UД1
4.8.4. Регулирование скорости движения изменением сопротивления резистора включенного последовательно в цепь Т Д.
Если в цепь ТД последовательно включен резистор с сопротивлением R (рис. 4.36),то скорость движения при некотором токе I1 номинальном напряжении UД.Н
 , (4.84)
, (4.84)
а при R=0 υ определяется формулой (4.80).
Поделив (4.84) на (4.80), получим
 . (4.85)
. (4.85)
Следовательно, чем больше значение R,тем меньше скорость движения при данном токе и напряжении по отношению к скорости при R=0. На рис. 4.37 кривой 2 показана зависимость vR(I) при наличии резистора R в его цепи, а кривой 1—при R =0.
Заметим, что разница в скоростях V и vrпо мере увеличения тока возрастает, тогда как при первом способе (см. 4.83) соотношение скоростей оставалось практически постоянным при разных значениях тока.
Сила тяги от величины сопротивления не зависит (4.68), следовательно, она будет равна FK1 как при R = 0, так и при некотором значении R (рис. 4.37, а). Таким образом, одно и то же значение FK1 будет реализовано при скоростях v1 (R = 0) и v1R 2 R, поэтому рассматриваемый способ является неэкономичным.
Количество тяговых характеристик, полученных этим способом, будет зависеть от числа значений сопротивления, которое технически возможно осуществить при каждом уровне напряжения, предусмотренном на том или ином типе ЭПС.
4.8:5. Регулирование скорости, движения изменением- магнитного потока ТД
При. последовательном возбуждении изменить величину магнитного потока .при некотором значении тока якоря Iя возможно только путем уменьшения тока Iв по отношению к Iя. Это обычно осуществляют подключением параллельно обмотке возбуждения резистора, то есть ее шунтированием (shun — англ. — избегать, обходить). По закону Кирхгофа для точки А (рис. 4.38)
 (4.86)
(4.86)
| | | следующая лекция ==> | |
| Активные методы борьбы с помехами | | | Френельдің аумақтық әдісі |
Дата добавления: 2015-11-06 ; просмотров: 3211 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Источник
Способы регулирования скорости эпс переменного тока
3.2.3. РЕГУЛИРОВАНИЕ СКОРОСТИ
На локомотивах регулирование скорости осуществляется с помощью контроллера машиниста. [ЖДТЭ] Контроллер машиниста — электрический аппарат, служащий на электроподвижном составе для управления работой ТЭД в тяговом и тормозном режимах, на тепловозах — для изменения реализуемой мощности дизеля.
А) Регулирование скорости электроподвижного состава достигается за счет изменения подводимого напряжения (силы) тока к ТЭД. В зависимости от вида применяемых ТЭД и устройств, включенных в цепь питания ТЭД, возможно ступенчатое и плавное регулирование напряжения тока, а, следовательно, и скорости движения локомотива. Пусковые реостаты, изменение числа последовательно соединенных двигателей, шунтирующие резисторы и трансформаторы позволяют менять напряжение ступенчато. Полупроводниковые приборы (тиристорные ключи, выпрямительные установки тиристорного типа, преобразователи частоты и числа фаз, автономные инверторы) совместно с нагрузочными и сглаживающими реакторами позволяют плавно регулировать напряжение.
[ПСОТП, ОТП] В системах ступенчатого регулирования скорости (напряжения) предусмотрены пусковые и ходовые позиции (ступени).
Пусковые ступени используют кратковременно при трогании и наборе скорости локомотивом, а также при переходе с одной ходовой позиции (соединения ТЭД для электровозов постоянного тока) на другую во избежание больших бросков тока. В последнем случае эти ступени называют переходными. Кроме этого несколько первых пусковых позиций, когда ток Iд меньше некоторой определенной величины Iдп.min, называют маневровыми. Кратковременность использования пусковых ступеней вызвана:
— для ЭПС постоянного тока значительными потерями энергии в пусковом реостате (электрическая энергия преобразуется в тепловую и рассеивается);
— для ЭПС переменного тока значительными потерями энергии в трансформаторах и сглаживающих реакторах, а также увеличением пульсации тока.
Ходовые ступени (ступени длительного режима) применяются при ведении локомотива по участку и являются более экономичными по сравнению с пусковыми. На электровозах постоянного тока ходовыми являются безреостатные ступени и ступени ослабленного возбуждения при различных соединениях ТЭД. На электровозах переменного тока ходовыми являются ступени регулирования напряжения в трансформаторе и ступени ослабленного возбуждения для последней ходовой позиции.
В общем случае, набор скорости за счет переключения позиций на ЭПС постоянного тока выглядит следующим образом:
— включают последовательное соединение ТЭД:
o трогание с места начинают с полностью включенным пусковым реостатом — используется первая маневровая позиция;
o ступенчато выводят (выключают) реостат до достижения величины тока двигателя Iдп.min — используются следующие маневровые позиции;
o продолжают ступенчато выводить реостат до полного его отключения — используются пусковые позиции;
o используют первую ходовую позицию при полном возбуждении полюсов статора С-ПП;
o ступенчато выводят шунтирующий резистор для ослабления возбуждения полюсов статора — используется следующие ходовые позиции при различных ступенях возбуждении полюсов статора С-ОП1, . С-ОПN;
— выполняют переход на последовательно-параллельное соединение ТЭД:
o включают пусковой реостат и ступенчато его выводят до полного отключения — используются переходные пусковые позиции;
o используют ходовую позицию при полном возбуждении полюсов статора СП-ПП;
o ступенчато выводят шунтирующий резистор для ослабления возбуждения полюсов статора — используется следующие ходовые позиции при различных ступенях возбуждении полюсов статора СП-ОП1, . СП-ОПN;
— выполняют переход на параллельное соединение ТЭД:
o включают пусковой реостат и ступенчато его выводят до полного отключения — используются переходные пусковые позиции;
o используют ходовую позицию при полном возбуждении полюсов статора П-ПП;
o ступенчато выводят шунтирующий резистор для ослабления возбуждения полюсов статора — используется следующие ходовые позиции при различных ступенях возбуждении полюсов статора П-ОП1, . П-ОПN.
Набор скорости за счет переключения позиций на ЭПС переменного тока выполняется последовательным ступенчатым изменением напряжения с помощью трансформатора. При этом, как правило, одна ходовая позиция чередуется с одной или несколькими промежуточными пусковыми (переходными) позициями. После достижения максимального допустимого напряжения (максимальной ходовой позиции с нормальным возбуждением) скорость движения увеличивают ослаблением возбуждения (ступенчато выводят шунтирующий резистор).
В системах плавного регулирования скорости (напряжения) предусмотрены зоны ступенчатого изменения напряжения. Переключение между зонами выполняется:
— на ЭПС постоянного тока за счет изменения числа последовательно соединенных двигателей (например, на электровозе 2ЭС6 — С, СП и П);
— на ЭПС переменного тока за счет переключения ступеней напряжения трансформатора (например, на электровозах ЭП1 и 2ЭС5К — 1, 2, 3 и 4 зоны).
В пределах каждой зоны за счет полупроводниковых приборов выполняется плавное автоматическое или ручное регулирование напряжения. [wiki] Например, на электровозе ЭП1 микропроцессорная система управления и диагностики (МСУД) управляет выпрямительно-инверторными преобразователями (ВИП), питающими ТЭД, и позволяет управлять электровозом в четырех режимах:
— «Авторегулирование» — полуавтоматический режим, при котором машинист с помощью штурвала контроллера задает максимальный требуемый ток, а с помощью рукоятки задатчика скорости устанавливает необходимую скорость. Электровоз разгоняется до установленной скорости и МСУД поддерживает ее в автоматическом режиме, за счет плавного регулирования напряжения на ТЭД с помощью тиристоров ВИП;
— «Ручное регулирование» — применяется как аварийный режим управления. В этом режиме, машинист штурвалом контроллера дает прямую команду МСУД на открытие тиристоров ВИП. Угол открытия тиристоров в этом случае будет зависеть только от угла, на который повернут штурвал контроллера машиниста. Автоматический разгон и поддержание скорости в этом режиме отсутствует. Положение рукоятки задатчика скорости никакого значения не имеет;
— «Автоведение» — режим автоматического ведения поезда, основной составляющей которого, является кассета с данными, на которой записаны профиль пути, допускаемые скорости, расположение светофоров, станций, расписание следования поезда и т.д. В этом режиме движения электровозом (поездом) управляет МСУД, используя информацию с кассеты и текущую информацию КЛУБ 15 . В зависимости от конкретной поездной ситуации автоматически выбирается режим движения (тяга, холостой ход, торможение), определяется и поддерживается скорость, необходимая для соблюдения расписания движения поезда. Машинист в этом случае, перед отправлением нажимает кнопку, включающую этот режим, а при движении выполняет контрольные функции. В случае если машинист самостоятельно передвинет штурвал контроллера или переместит ручку тормозного крана, система автоматически перейдет в режим «Советчик», о чем сообщит визуальной и звуковой информацией;
— «Советчик» — режим управления, который использует функции «Авторегулирования» и частично «Автоведения». Для этого режима также необходима кассета с данными. В этом случае машинист управляет электровозом аналогично режиму «Авторегулирование», но на дисплее появляются рекомендации МСУД о наиболее эффективных действиях машиниста на текущий момент.
В дополнение к плавному регулированию напряжения на ЭПС переменного тока для реализации повышенной силы тяги и, соответственно, большей скорости при достижении наибольшего напряжения (последней зоны) возможно ступенчатое регулирование за счет ослабления возбуждения обмоток статора. В частности на электровозах ЭП1 и 2ЭС5К для 4 зоны имеется 3 ступени ослабления возбуждения.
Б) Регулирование скорости тепловозов и дизель-поездов достигается за счет изменения числа оборотов коленчатого вала (мощности) дизеля. Для этого машинист переводит рукоятку контроллера с одной позиции на другую. Количество позиций на отечественных тепловозах колеблется от 8 до 16. При этом ступенчато увеличивается (уменьшается) подача топлива в цилиндры дизеля до тех пор, пока число оборотов вала дизеля не возрастет до заданной величины (соответствующей положению рукоятки контроллера) [ПСТХЖД].
Дальнейшее регулирование скорости и силы тяги в пределах одной позиции с целью наиболее рационального использования мощности дизеля осуществляется за счет автоматического переключения:
— в механической передаче — пар зубчатых колес (шестерен) с различным количеством зубьев в коробке передач. Например, для дизель-поезда Д1 — I, II и III ступени;
— в гидравлической передаче — гидроаппаратов. Например, для тепловоза ТГМ3А — 1 гидротрансформатор, 2 гидротрансформатор и гидромуфта;
— в электрической передаче — схемы подключения ТЭД с последовательного (сериесного — С) на последовательно-параллельное (СП) и с последовательно-параллельного (СП) на параллельное (ПП) или при одной схеме подключения ТЭД за счет ступеней ослабления магнитного поля ТЭД (ОП). Например, для тепловоза ТЭ1 — С, СП и СП-ОП1, для ТЭ7 — СП, СП-ОП1 и СП-ОП2, для ТЭ10 — ПП, ПП-ОП1 и ПП-ОП2.
Таким образом, при одной и той же позиции контроллера машиниста образуется несколько ступеней скорости (на тяговой характеристике зависимостей Fк(V)). Прямые и обратные переходы с одной ступени на другую отличаются на несколько километров в час с «нахлестом» (в среднем на 10-20 км/ч). Этим предотвращаются частые повторные переключения в зоне переходов:
— в механической передаче — зубчатых колес в коробке передач;
— в гидродинамической передаче — гидроаппаратов;
— в электрической передаче — схем подключения ТЭД и переключения степеней ослабления магнитного потока (тока возбуждения) ТЭД.
На тепловозах с электрической передачей на базе асинхронных ТЭД (например, ТЭ120, 2ТЭ25А) возможно плавное изменение скорости (точнее, подводимого к ТЭД напряжения) в пределах зон регулирования напряжения и ступенчатое ослабление возбуждения для последней зоны такое же, как и для аналогичных электровозов.
15 Комплексное локомотивное устройство безопасности (КЛУБ) устанавливается на тяговом и самоходном железнодорожном подвижном составе (локомотивы, МВПС, дрезины) и функционально сочетает в себе автоматическую локомотивную сигнализацию и электронный локомотивный скоростемер.
Источник



