
Регулирование скорости движения на ЭПС
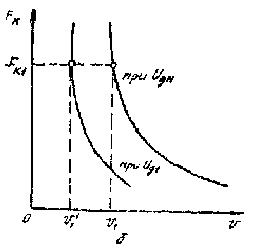
Из предыдущего следует, что каждому значению силы тяги соответствует одна (и только одна) скорость движения поезда определенной массы на конкретном элементе профиля пути. Поэтому наличие одной тяговой характеристики не позволяет выбрать необходимую по условиям движения скорость. Необходимость же иметь такой выбор очевидна. Она вытекает из того, что профиль пути постоянно изменяется, изменяется и сопротивление движению, а движение поезда необходимо обеспечить с установленной скоростью, предусмотренной графиком. Поезда, следующие по участку, имеют различную массу, а следовательно, и значения сопротивления движению у них разные. При этом каждый поезд необходимо вести с определенной скоростью.
При наличии одной тяговой характеристики, соответствующей номинальному напряжению UД.Н, невозможно произвести пуск электровоза. Это следует из рис. 4.34: тяговая характеристика 1 не пересекает оси ординат, то есть сила тяги при V = 0 бесконечно велика и не может быть реализована.
Задача управления ЭПС сводится, таким образом, к выбору необходимого режима движения и осуществлению пуска ЭПС. Следовательно, необходимо иметь несколько тяговых характеристик. Получение «семейства» их, в принципе, возможно путем изменения величин, входящих в уравнения (4.68) и (4.72), а следовательно, влияющих на расположение тяговой характеристики в системе координат FK—v.
При этом следует иметь в виду, что величину тока произвольно изменять нельзя, так как его значение однозначно определяется противоЭДС, приложенный напряжением и сопротивлением обмоток двигателя.
4.8.2. Способы регулирования скорости движения
В формулы, определяющие значения силы тяги (4.68) и скорости движения (4.72) при определенном токе» входит ряд величин, часть из которых изменить в процессе движения невозможно. К ним относятся: постоянные КМБ CVи CF сопротивление обмоток ТД rД и КПД ηМи ηЗ.П .
Для получения нескольких тяговых; характеристик могут быть использованы при возможности:
1) изменение напряжения, подведённого к ТД, — UД;
2) включение последовательно в цепь ТД добавочного резистора R;
3) изменение величины магнитного потока Ф при неизменном токе якоря.
Все указанные возможности нашли практическое использование на ЭПС постоянного и переменного тока.
4.8.3. Регулирование скорости движения .изменением напряжения, подведенного к ТД
Допустим, что скоростная характеристика ТД при номинальном напряжении UД.Н имеет вид, представленный на рис. 4.39, а кривой 1. При некотором значении тока IД1 скорость движения
 . (4.80)
. (4.80)
При другой величине напряжения  и том же токе
и том же токе
 . (4.81)
. (4.81)
Поделив (4.80) на (4.81), получим
 .
.
При одинаковых токах магнитные потоки будут равны, следовательно,
 . (4.82)
. (4.82)
Или пренебрегая незначительной величиной потери напряжения IЯrД по отношению к UД, получим
 |
 . (4.83)
. (4.83)
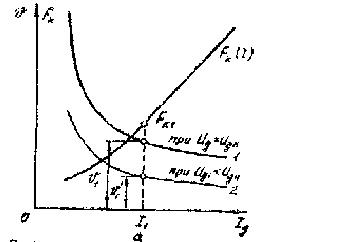
Рис. 4.35
Выполняя аналогичные расчеты для других значений тока, получим «семейство» точек, а соединив их плавной кривой— скоростную характеристику при новом значении напряжения UД1
4.8.4. Регулирование скорости движения изменением сопротивления резистора включенного последовательно в цепь Т Д.
Если в цепь ТД последовательно включен резистор с сопротивлением R (рис. 4.36),то скорость движения при некотором токе I1 номинальном напряжении UД.Н
 , (4.84)
, (4.84)
а при R=0 υ определяется формулой (4.80).
Поделив (4.84) на (4.80), получим
 . (4.85)
. (4.85)
Следовательно, чем больше значение R,тем меньше скорость движения при данном токе и напряжении по отношению к скорости при R=0. На рис. 4.37 кривой 2 показана зависимость vR(I) при наличии резистора R в его цепи, а кривой 1—при R =0.
Заметим, что разница в скоростях V и vrпо мере увеличения тока возрастает, тогда как при первом способе (см. 4.83) соотношение скоростей оставалось практически постоянным при разных значениях тока.
Сила тяги от величины сопротивления не зависит (4.68), следовательно, она будет равна FK1 как при R = 0, так и при некотором значении R (рис. 4.37, а). Таким образом, одно и то же значение FK1 будет реализовано при скоростях v1 (R = 0) и v1R 2 R, поэтому рассматриваемый способ является неэкономичным.
Количество тяговых характеристик, полученных этим способом, будет зависеть от числа значений сопротивления, которое технически возможно осуществить при каждом уровне напряжения, предусмотренном на том или ином типе ЭПС.
4.8:5. Регулирование скорости, движения изменением- магнитного потока ТД
При. последовательном возбуждении изменить величину магнитного потока .при некотором значении тока якоря Iя возможно только путем уменьшения тока Iв по отношению к Iя. Это обычно осуществляют подключением параллельно обмотке возбуждения резистора, то есть ее шунтированием (shun — англ. — избегать, обходить). По закону Кирхгофа для точки А (рис. 4.38)
 (4.86)
(4.86)
| | | следующая лекция ==> | |
| Активные методы борьбы с помехами | | | Френельдің аумақтық әдісі |
Дата добавления: 2015-11-06 ; просмотров: 3224 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Источник
Регулирование скорости двигателей постоянного тока
 Из уравнения электромеханической характеристики двигателя постоянного тока независимого возбуждения следует, что возможны три способа регулирования его угловой скорости:
Из уравнения электромеханической характеристики двигателя постоянного тока независимого возбуждения следует, что возможны три способа регулирования его угловой скорости:
1) регулирование за счет изменения величины сопротивления реостата в цепи якоря,
2) регулирование за счет изменения потока возбуждения двигателя Ф,
3) регулирование за счет изменения подводимого к обмотке якоря двигателя напряжения U . Ток в цепи якоря I я и момент М, развиваемый двигателем, зависят только от величины нагрузки на его валу.
Рассмотрим первый способ регулирования скорости двигателя постоянного тока изменением сопротивления в цепи якоря . Схема включения двигателя для этого случая представлена на рис. 1 , а электромеханические и механические характеристики — на рис. 2 , а.
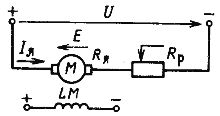
Рис. 1. Схема включения двигателя постоянного тока независимого возбуждения
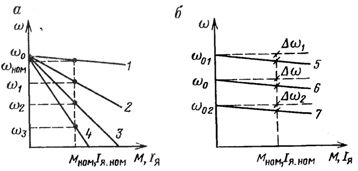
Рис. 2. Механические характеристики двигателя постоянного тока при различных сопротивлениях цепи якоря (а) и напряжениях (б)
Изменяя сопротивление реостата в цепи якоря можно получить при номинальной нагрузке различные угловые скорости электродвигателя на искусственных характеристиках — ω1, ω2, ω3.
Проведем анализ данного способа регулирования угловой скорости двигателей постоянного тока с помощью основных технико-экономических показателей. Так как при данном способе регулирования изменяется жесткость характеристик в широких пределах, то при скоростях менее половины номинальной стабильность работы двигателя резко ухудшается. По этой причине диапазон регулирования скорости ограничен ( D = 2 — З).
Скорость при данном способе можно регулировать в сторону уменьшения от основной, о чем свидетельствуют электромеханические и механические характеристики. Высокую плавность регулирования трудно обеспечить, так как потребовалось бы значительное количество ступеней регулирования и соответственно большое число контакторов. Полное использование двигателя по току (нагреву) в этом случае достигается при регулировании с постоянным моментом нагрузки.
Недостатком рассматриваемого способа является наличие значительных потерь мощности при регулировании, которые пропорциональны относительному изменению угловой скорости. Достоинством рассмотренного способа регулирования угловой скорости являются простота и надежность схемы управления.
Учитывая большие потери в реостате при малых скоростях, данный способ регулирования скорости применяется для приводов с кратковременным и повторно-кратковременным режимами работы.
 При втором способе регулирование угловой скорости двигателей постоянного тока независимого возбуждения осуществляется изменением величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата. При ослаблении потока угловая скорость двигателя как при нагрузке, так и при холостом ходе возрастает, а при усилении потока — уменьшается. Практически возможно изменение скорости только в сторону увеличения ввиду насыщения двигателя.
При втором способе регулирование угловой скорости двигателей постоянного тока независимого возбуждения осуществляется изменением величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата. При ослаблении потока угловая скорость двигателя как при нагрузке, так и при холостом ходе возрастает, а при усилении потока — уменьшается. Практически возможно изменение скорости только в сторону увеличения ввиду насыщения двигателя.
При увеличении скорости ослаблением потока допустимый момент двигателя постоянного тока изменяется по закону гиперболы, а мощность остается постоянной. Диапазон регулирования скорости для данного способа D = 2 — 4 .
Механические характеристики для различных значений потока двигателя приведены на рис. 2 , а и 2 , б, из которых видно, что характеристики в пределах номинального тока имеют высокую степень жесткости.
Обмотки возбуждения двигателей постоянного тока независимого возбуждения обладают значительной индуктивностью. Поэтому при ступенчатом изменении сопротивления реостата в цепи обмотки возбуждения ток, а следовательно, и поток будут изменяться по экспоненциальному закону. В связи с этим регулирование угловой скорости будет осуществляться плавно.
Существенными преимуществами данного способа регулирования скорости являются его простота и высокая экономичность.
Данный способ регулирования используют в приводах в качестве вспомогательного, обеспечивающего повышение скорости при холостом ходе механизма.
Третий способ регулирования скорости заключается в изменении напряжения, подводимого к обмотке якоря двигателя. Угловая скорость двигателя постоянного тока независимо от нагрузки изменяется прямо пропорционально напряжению, подводимому к якорю. Поскольку все регулировочные характеристики являются жесткими, а степень их жесткости остается для всех характеристик неизменной, работа двигателя является стабильной на всех угловых скоростях и, следовательно, обеспечивается широкий диапазон регулирования скорости независимо от нагрузки. Этот диапазон равен 10 и может быть расширен за счет специальных схем управления.
При данном способе угловую скорость можно уменьшать и увеличивать относительно основной. Повышение скорости ограничено возможностями источника энергии с регулируемым напряжением и U ном двигателя.
Если источник энергии обеспечивает возможность непрерывного изменения подводимого к двигателю напряжения, то регулирование скорости двигателя будет плавным.
Данный способ регулирования является экономичным, так-так регулирование угловой скорости двигателя постоянного тока независимого возбуждения осуществляется без дополнительных потерь мощности в силовой цепи якоря. По всем перечисленным выше показателям данный способ регулирования по сравнению с первым и вторым наилучший.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Способы регулирования скорости движения на электроподвижном составе.




![]()
![]()
Тяговый подвижной состав должен обеспечивать трогание с места, разгон и движение с различными скоростями, ускорениями и замедлениями. Как видно из формулы (4) регулировать частоту вращения (скорость) можно тремя способами:
· изменением напряжения подводимого к тяговому двигателю;
· изменением магнитного потока, создаваемого обмоткой возбуждения двигателя;
· введением дополнительного сопротивления в цепь обмотки якоря тягового двигателя.
Первые два способа получили широкое распространение на тяговом подвижном составе, так как не предполагают дополнительных потерь энергии.
Третий способ (введение дополнительного сопротивления) используется, как правило, только при трогании с места э.п.с. постоянного тока и в процессе изменения схемы соединения тяговых двигателей, так как при введении дополнительных сопротивлений в цепь обмотки якоря значительная часть подводимой энергии будет расходоваться на нагрев этих сопротивлений, не совершая полезной работы, и тем самым значительно снижая к.п.д. э.п.с.
Источник



