
Регулирование частоты вращения двигателей с параллельным возбуждением
 Частоту вращения двигателей постоянного тока можно изменять тремя способами: изменением сопротивления rя цепи якоря , изменением магнитного потока Ф , изменением подводимого к двигателю напряжения U.
Частоту вращения двигателей постоянного тока можно изменять тремя способами: изменением сопротивления rя цепи якоря , изменением магнитного потока Ф , изменением подводимого к двигателю напряжения U.
Первый способ применяют редко, так как он неэкономичен, дает возможность вести регулирование частоты вращения только под нагрузкой и вынуждает использовать механические характеристики, имеющие различный наклон. При регулировании по этому способу вращающий предельно допустимый момент остается постоянным. Магнитный поток не меняется, и если приближенно считать, что сила тока, определяемая длительно допустимым нагревом двигателя, одинакова на всех частотах вращения, то предельно допустимый момент также должен быть одинаков на всех скоростях.
Регулирование скорости двигателей постоянного тока с параллельным возбуждением изменением магнитного потока получило значительное распространение. Величину потока можно изменять реостатом. При увеличении сопротивления этого реостата уменьшается сила тока возбуждения и магнитный поток и увеличивается частота вращения. Каждому уменьшенному значению магнитного потока Ф соответствуют увеличенные значения n0 и b.
Таким образом, при ослаблении магнитного потока механические характеристики представляют собой прямые линии, расположенные выше естественной характеристики, непараллельные ей и имеющие тем больший наклон, чем меньшим потокам они соответствуют. Число их зависит от числа контактов на реостате и может быть достаточно большим. Таким образом, регулирование частоты вращения ослаблением потока может быть сделано практически бесступенчатым.

Если по-прежнему приближенно считать предельно допустимую силу тока на всех скоростях одинаковой, то P = const
Таким образом, при регулировании частоты вращения изменением магнитного потока предельно допустимая мощность двигателя остается постоянной при всех скоростях. Предельно допустимый момент изменяется обратно пропорционально частоте вращения. При повышении частоты вращения двигателя ослаблением поля увеличивается искрение под щетками вследствие роста реактивной э. д. с, наводимой в коммутируемых секциях двигателя.
При работе двигателя с ослабленным потоком уменьшается устойчивость работы, особенно когда нагрузка на валу двигателя является переменной. При малом значении потока заметно размагничивающее действие реакции якоря. Так как размагничивающее действие определяется величиной силы тока якоря электродвигателя, то при изменениях нагрузки частота вращения двигателя резко меняется. Для повышения устойчивости работы регулируемые двигатели с параллельным возбуждением обычно снабжают слабой последовательной обмоткой возбуждения, поток которой частично компенсирует размагничивающее действие реакции якоря.
Двигатели, предназначенные для работы с повышенными частотами вращения, должны обладать повышенной механической прочностью. При высоких скоростях усиливаются вибрации двигателя и шум при работе. Эти причины ограничивают наибольшую частоту вращения электродвигателя. Низшая частота вращения также имеет определенный практический предел.
Номинальный момент определяет размеры и стоимость двигателей постоянного тока (так же как и асинхронных двигателей). При понижении наименьшей, в данном случае номинальной, частоты вращения двигателя определенной мощности номинальный момент его возрастет. Размеры двигателя при этом увеличатся.
На промышленных предприятиях наиболее часто применяют двигатели с диапазонами регулирования

Для расширения диапазона регулирования частоты вращения изменением магнитного потока иногда употребляют особую схему возбуждения двигателя, позволяющую улучшить коммутацию и снизить влияние реакции якоря на высоких частотах вращения двигателя. Питание катушек двух пар полюсов разделяют, образуя две независимые цепи: цепь катушек одной пары полюсов и цепь другой пары.
Одну из цепей включают на постоянное напряжение, в другой изменяют величину и направление тока. При таком включении общий магнитный поток, взаимодействующий с якорем, можно изменять от суммы наибольших значений потоков катушек двух цепей до их разности.
Катушки включены так, что через одну пару полюсов всегда проходит полный магнитный поток. Поэтому реакция якоря сказывается в меньшей степени, чем при ослаблении магнитного потока всех полюсов. Так можно регулировать все многополюсные двигатели постоянного тока с волновой обмоткой якоря. При этом достигается устойчивая работа двигателя в значительном диапазоне скоростей.
Регулирование частоты вращения двигателей постоянного тока посредством изменения подводимого напряжения требует применения специальных схем.
Двигатели постоянного тока по сравнению с асинхронными значительно тяжелее и в несколько раз дороже. К. п. д. этих двигателей ниже, а эксплуатация их более сложна.
Промышленные предприятия получают энергию трехфазного тока, и для получения постоянного тока требуются специальные преобразователи. Это связано с добавочными потерями энергии. Основной причиной применения для привода металлорежущих станков двигателей постоянного тока с параллельным возбуждением является возможность практически бесступенчатого и экономичного регулирования их частоты вращения.
В станкостроении применяют комплектные приводы с выпрямителями и двигателем постоянного тока с параллельным возбуждением (рис. 1). Посредством реостата PC изменяют силу тока возбуждения электродвигателя, обеспечивая практически бесступенчатое регулирование его частоты вращения в диапазоне 2:1. В комплект привода входит пусковой реостат РП, а также аппаратура защиты, на рис. 1 не показанная.
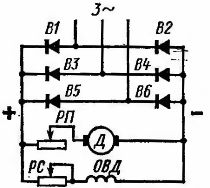
Рис. 1. Схема электропривода постоянного тока с выпрямителем
В ыпрямители (B1 — В6), погруженные в трансформаторное масло, и всю аппаратуру помещают в шкафу управления, а реостат PC устанавливают в месте, удобном для обслуживания.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Регулирование скорости вращения двигателей постоянного тока с параллельным возбуждением
Из уравнения механической характеристики (11) и рис. 10 следует, что скорость вращения двигателя постоянного тока можно регулировать, изменяя один из параметров: сопротивление цепи якоря rя, магнитный поток двигателя Ф или напряжение питания U.
Регулирование скорости двигателя постоянного тока с параллельным возбуждением изменением сопротивления цепи якоря применяется редко, так как оно неэкономично и обладает теми же недостатками, что и реостатное регулирование скорости асинхронных двигателей с фазовым ротором. Как и у асинхронных двигателей регулирование по этому способу производится с постоянным моментом. Обычный диапазон регулирования: nmax/nmin=2:1.
Широкое распространение получило регулирование скорости изменением магнитного потока двигателя, осуществляемое с помощью реостата R2 (рис. 10), включенного в цепь обмотки возбуждения. Согласно формулам (12) и (14) каждому значению магнитного потока Ф соответствуют определенные значения п0 и b. Поэтому при изменении магнитного потока двигателя его механические характеристики изображаются прямыми 5…8, не параллельными естественной механической характеристике 7, (рис. 10). Регулирование скорости изменения магнитного потока двигателя осуществляется просто и достаточно экономично, так как ток возбуждения мал по сравнению с током якоря.
С учетом выражений (4), (9) и (10)
 (16)
(16)
Предельно допустимый ток якоря Iя определяется условиями нагрева и поэтому при регулировании скорости двигателя не изменяется. Тогда согласно формуле (16) мощность двигателя при изменении магнитного потока остается постоянной. Следовательно, регулирование скорости двигателя изменением магнитного потока является регулированием с постоянной мощностью. Диапазон регулирования скорости двигателей постоянного тока с параллельным возбуждением изменением магнитного потока лежит в пределах nmax/nmin = (2:1)…(4:1).
Регулирование скорости изменением магнитного потока используется в комплектных регулируемых приводах серии ПКВ. В этих приводах двигатель подключается к сети переменного тока через трансформатор и трехфазный выпрямительный мост на кремниевых вентилях. Номинальная мощность приводов серии ПКВ 6 –25 кВт, обеспечиваемый диапазон бесступенчатого регулирования 2:1.
Регулирование скорости вращения двигателя постоянного тока изменением напряжения питания осуществляется при постоянном магнитном потоке двигателя. В этом случае к обмотке возбуждения двигателя подводится постоянное напряжение, а якорь двигателя подключают к источнику регулируемого напряжения, т. е. по существу используется двигатель с независимым возбуждением. Регулирование скорости изменением напряжения достаточно экономично, так как оно не связано с дополнительными потерями в двигателе. Однако для такого регулирования требуются специальные источники регулируемого напряжения, вследствие чего общий к. п. д. системы уменьшается.
Из выражения (9) следует, что регулирование изменением напряжения является регулированием с постоянным моментом, так как магнитный поток двигателя Ф и предельно допустимый ток якоря Iя остаются неизменными. Согласно уравнению (11) линейные механические характеристики двигателя, соответствующие различным значениям напряжения питания U, расположены одна под другой и параллельны естественной. Диапазон регулирования скорости вращения двигателя изменением напряжения обычно не превышает 5:1. Регулирование скорости двигателей изменением напряжения широко используется в системах автоматического управления и регулирования.
Регулируемое напряжение для питания двигателя постоянного тока можно получить, например, с помощью электромашинного преобразователя. Такой преобразователь вместе с двигателем привода машины называют системой генератор – двигатель (сокращенно Г – Д).
С истемаГ – Д (рис. 12) состоит из первичного асинхронного (или любого другого) двигателя М1, генератора постоянного тока Г, возбудителя Г В и исполнительного двигателя постоянного тока М2, используемого для непосредственного привода машины. Двигатель М1 приводит во вращение генератор Г с независимым возбуждением и возбудитель Г В – небольшой генератор с самовозбуждением (параллельным или смешанным). От возбудителя ГВ питаются обмотки возбуждения генератора ОВГ и двигателя ОВМ. Цепь якоря двигателя М2 подключена к генератору Г.
истемаГ – Д (рис. 12) состоит из первичного асинхронного (или любого другого) двигателя М1, генератора постоянного тока Г, возбудителя Г В и исполнительного двигателя постоянного тока М2, используемого для непосредственного привода машины. Двигатель М1 приводит во вращение генератор Г с независимым возбуждением и возбудитель Г В – небольшой генератор с самовозбуждением (параллельным или смешанным). От возбудителя ГВ питаются обмотки возбуждения генератора ОВГ и двигателя ОВМ. Цепь якоря двигателя М2 подключена к генератору Г.
Изменяя сопротивление реостата R1 в цепи возбуждения генератора Г, можно изменить напряжение на его зажимах и, следовательно, скорость вращения двигателя М2. С помощью реостата R2 можно изменять магнитный поток двигателя М2. Таким образом, система Г – Д позволяет регулировать скорость вращения двигателя изменением как напряжения, так и магнитного потока. Общий диапазон регулирования равен произведению диапазонов регулирования обоими способами и обычно составляет (10: 1)…(15: 1), но может достигать (20: 1)…(30: 1).
М еханические характеристики двигателя в системеГ – Д приведены на рис. 13. Пуск двигателя осуществляется при полном магнитном потоке подключением обмотки возбуждения генератора ОВГ переключателем В1 (рис. 12)
еханические характеристики двигателя в системеГ – Д приведены на рис. 13. Пуск двигателя осуществляется при полном магнитном потоке подключением обмотки возбуждения генератора ОВГ переключателем В1 (рис. 12)
Ввиду большого индуктивного сопротивления обмотки ОВГ ток в ней нарастает медленно, а напряжение, подводимое к двигателю, повышается постепенно. Пуск двигателя можно форсировать, закорачивая на время пуска сопротивление R3 выключателем В2.
Сопротивление R4 является разрядным. Замедляя уменьшение магнитного потока и снижая тем самым э. д. с. самоиндукции, оно предохраняет изоляцию обмотки возбуждения от пробоя в случае обрыва или отключения цепи возбуждения.
Реверс электродвигателя М2 осуществляется изменением направления тока в обмотке возбуждения генератора ОВГ с помощью переключателя В1 (или другого аналогичного устройства). Основными недостатками системы ГД являются относительно низкий к. п. д. (0,6…0,7), высокая стоимость, превышающая стоимость асинхронного двигателя в 8…10 раз, и значительные размеры. Поэтому в современных литейных машинах система Г – Д применяется редко (например, в центробежных машинах).
Иногда в качестве источника регулируемого напряжения для питания двигателей постоянного тока используются электромашинные усилители (ЭМУ) с поперечным магнитным потоком, например, в приводе электродов дуговой печи (рис. 14).
Экспериментально установлено, что наиболее экономичный режим плавки происходит при определенной мощности дуги. Система управления автоматически стабилизирует эту мощность путем изменения дугового промежутка. Напряжение дуги Uд и ток Iд подаются через выпрямители Bn1 и Вп2 на сравнивающее устройство. Если мощность дуги соответствует заданному значению, то напряжение Uy на потенциометре R и на обмотке управления ОУ1 равно нулю. ЭМУ не возбуждается, и якорь двигателя М находится в покое (не вращается).
П ри отклонении в режиме плавки изменяется соотношение напряжения и тока дуги, вследствие чего на обмоткеОУ1 появляется управляющее напряжение Uy. ЭМУ возбуждается, на его выходных клеммах появляется напряжение, и двигатель М начинает перемещать электрод Э, устраняя появившееся отклонение от заданного режима, устанавливаемого потенциометром R. Для компенсации неравномерности нагрузки при опускании и подъеме электрода на вторую обмотку управления ОУ2 подается напряжение, компенсирующее вес электрода.
ри отклонении в режиме плавки изменяется соотношение напряжения и тока дуги, вследствие чего на обмоткеОУ1 появляется управляющее напряжение Uy. ЭМУ возбуждается, на его выходных клеммах появляется напряжение, и двигатель М начинает перемещать электрод Э, устраняя появившееся отклонение от заданного режима, устанавливаемого потенциометром R. Для компенсации неравномерности нагрузки при опускании и подъеме электрода на вторую обмотку управления ОУ2 подается напряжение, компенсирующее вес электрода.
В последние годы все шире применяются приводы с полупроводниковыми управляемыми вентилями – тиристорами (рис.15). Тиристор имеет четырехслойную структуру типа р-п-р-п. Вывод от внутренней базовой области (р-области) служит управляющим электродом. При отсутствии сигнала на управляющем электроде тиристор остается в запертом состоянии при напряжении питания прямой полярности, меньшем определенного предела (напряжения включения).
При поступлении сигнала на управляющий электрод тиристор переходит в открытое состояние при напряжении питания, меньшем напряжения включения. После открывания тиристора управляющий электрод теряет свои управляющие свойства, а запирание тиристора возможно уменьшением силового тока до определенного предела, называемого током выключения. Падение напряжения на тиристоре в открытом состоянии не превышает 1 В.
Тиристоры отличаются высокой экономичностью, надежностью в работе, безынерционностью, малыми размерами и массой. При работе они не создают радиопомех и имеют практически неограниченный срок службы. Отечественной промышленностью серийно выпускаются кремниевые управляемые вентили серий ВКУ и ВКУВ, рассчитанные на номинальный ток до 100 а. Начато производство тиристоров на ток до 250 а.
П ри использовании тиристоров в выпрямителях становится возможным получить регулируемое напряжение для двигателей постоянного тока. Так, в схеме нереверсивного электропривода, разработанной для двигателя мощностью 15кВт (рис. 15), регулируемое напряжение к якорю двигателя М подводится от трехфазного несимметричного мостового выпрямителя на неуправляемых кремниевых вентилях Д1…ДЗ и тиристорах ДУ1…ДУЗ.
ри использовании тиристоров в выпрямителях становится возможным получить регулируемое напряжение для двигателей постоянного тока. Так, в схеме нереверсивного электропривода, разработанной для двигателя мощностью 15кВт (рис. 15), регулируемое напряжение к якорю двигателя М подводится от трехфазного несимметричного мостового выпрямителя на неуправляемых кремниевых вентилях Д1…ДЗ и тиристорах ДУ1…ДУЗ.
Обмотка возбуждения ОВМ подключена к неуправляемому мостовому выпрямителю на вентилях Д…Д6.
Управление тиристорами осуществляется при помощи зарядных цепей R – C. Например, при положительной полуволне напряжения конденсатор С2 заряжается через вентиль Д1 или ДЗ, сопротивление R7 и диод Д8. С конденсаторов С1…СЗ напряжение подается на управляющие электроды тиристоров через токоограничивающие сопротивления R4…R6. При зарядке конденсатора открывается соответствующий ему тиристор. Время зарядки конденсатора и, следовательно, момент открывания (угол открывания) тиристора определяются постоянной времени  =RC зарядного контура и могут регулироваться сопротивлением R7. В зависимости от угла открывания тиристора изменяется длительность протекания тока через него в течение положительной полуволны напряжения и, следовательно, среднее значение выпрямленного напряжения.
=RC зарядного контура и могут регулироваться сопротивлением R7. В зависимости от угла открывания тиристора изменяется длительность протекания тока через него в течение положительной полуволны напряжения и, следовательно, среднее значение выпрямленного напряжения.
Сопротивления R…R3 служат для разрядки конденсаторов С1…СЗ во время отрицательной полуволны напряжения.
Диапазон регулирования скорости двигателя в рассмотренной схеме равен 1…10. Для управления тиристорами в более сложных схемах используются насыщенные дроссели или устройства на транзисторах и маломощных тиристорах. Примером такого привода может служить привод типа ПКВУ с обратной связью по скорости и промежуточным полупроводниковым усилителем. Мощность привода 8 кВт. В диапазоне скоростей 15… 1500 об/мин колебание скорости вращения двигателя не превышает 5% при М = (0,25…1)МН.
Основным недостатком приводов, в которых регулирование напряжения осуществляется изменением угла открывания тиристоров, является значительное снижение cosφ при уменьшении скорости вращения двигателя. С целью повышения cosφ используют схемы, в которых регулируемое напряжение тиристорного выпрямителя алгебраически суммируется (складывается или вычитается) с постоянным нерегулируемым напряжением.
Источник



