
Регулирование скорости асинхронного двигателя
Наиболее распространены следующие способы регулирования скорости асинхронного двигателя : изменение дополнительного сопротивления цепи ротора, изменение напряжения, подводимого к обмотке статора, двигателя изменение частоты питающего напряжения, а также переключение числа пар полюсов.

Регулирование частоты вращения асинхронного двигателя путем введения резисторов в цепь ротора
Введение резисторов в цепь ротора приводит к увеличению потерь мощности и снижению частоты вращения ротора двигателя за счет увеличения скольжения, поскольку n = n о (1 — s).
Из рис. 1 следует, что при увеличении сопротивления в цепи ротора при том же моменте частота вращения вала двигателя уменьшается.
Жесткость механических характеристик значительно снижается с уменьшением частоты вращения, что ограничивает диапазон регулирования до (2 — 3) : 1. Недостатком этого способа являются значительные потери энергии, которые пропорциональны скольжению. Такое регулирование возможно только для двигателя с фазным ротором.
 Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Изменение напряжения, подводимого к обмотке статора асинхронного двигателя , позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Для этого между сетью переменного тока со стандартным напряжением U 1ном и статором электродвигателя включается регулятор напряжения .
При регулировании частоты вращения асинхронного двигателя изменением напряжения, подводимого к обмотке статора, критический момент М кр асинхронного двигателя изменяется пропорционально квадрату подводимого к двигателю напряжения U рет (рис. 3 ), а скольжение от U рег не зависит.

Рис. 1. Механические характеристики асинхронного двигателя с фазным ротором при различных сопротивлениях резисторов, включенных в цепь ротора

Рис. 2. Схема регулирования скорости асинхронного двигателя путем изменения напряжения на статоре

Рис. 3. Механические характеристики асинхронного двигателя при изменении напряжения подводимого к обмоткам статора
Если момент сопротивления рабочей машины больше пускового момента электродвигателя (Мс > Мпуск), то двигатель не будет вращаться, поэтому необходимо запустить его при номинальном напряжении Uном или на холостом ходу.
Регулировать частоту вращения короткозамкнутых асинхронных двигателей таким способом можно только при вентиляторном характере нагрузки. Кроме того, должны использоваться специальные электродвигатели с повышенным скольжением. Диапазон регулирования небольшой, до n кр.
Для изменения напряжения применяют трехфазные автотрансформаторы и тиристорные регуляторы напряжения.

Рис. 4. Схема замкнутой системы регулирования скорости тиристорный регулятор напряжения — асинхронный двигатель (ТРН — АД)
Замкнутая схема управления асинхронным двигателем , выполненным по схеме тиристорный регулятор напряжения — электродвигатель позволяет регулировать скорость асинхронного двигателя с повышенным скольжением (такие двигатели применяются в вентиляционных установках).
Регулирование частоты вращения асинхронного двигателя изменением частоты питающего напряжения
Так как частота вращения магнитного поля статора n о = 60 f /р, то регулирование частоты вращения асинхронного двигателя можно производить изменением частоты питающего напряжения.
 Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость n о магнитного поля статора.
Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость n о магнитного поля статора.
Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью.
Для получения высоких энергетических показателей асинхронных двигателей (коэффициентов мощности, полезного действия, перегрузочной способности) необходимо одновременно с частотой изменять и подводимое напряжение. Закон изменения напряжения зависит от характера момента нагрузки Мс. При постоянном моменте нагрузки напряжение на статоре должно регулироваться пропорционально частоте.
Схема частотного электропривода приведена на рис. 5, а механические характеристики АД при частотном регулировании — на рис. 6.

Рис. 5. Схема частотного электропривода

Рис. 6. Механические характеристики асинхронного двигателя при частотном регулировании
С уменьшением частоты f критический момент несколько уменьшается в области малых частот вращения. Это объясняется возрастанием влияния активного сопротивления обмотки статора при одновременном снижении частоты и напряжения.
Частотное регулирование скорости асинхронного двигателя позволяет изменять частоту вращения в диапазоне (20 — 30) : 1. Частотный способ является наиболее перспективным для регулирования асинхронного двигателя с короткозамкнутым ротором. Потери мощности при таком регулировании невелики, поскольку минимальны потери скольжения.
 Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока.
Силовой трехфазный импульсный инвертор содержит шесть транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя.
В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями. Регулирование выходной частоты I вых и выходного напряжения осуществляется за счет высокочастотной широтно-импульсной модуляции.
Регулирование частоты вращения асинхронного двигателя переключение числа пар полюсов
Ступенчатое регулирование скорости можно осуществить, используя специальные многоскоростные асинхронные двигатели с короткозамкнутым ротором.
Из выражения n о = 60 f /р следует, что при изменении числа пар полюсов р получаются механические характеристики с разной частотой вращения n о магнитного поля статора. Так как значение р определяется целыми числами, то переход от одной характеристики к другой в процессе регулирования носит ступенчатый характер.
Существует два способа изменения числа пар полюсов. В первом случае в пазы статора укладывают две обмотки с разным числом полюсов. При изменении скорости к сети подключается одна из обмоток. Во втором случае обмотку каждой фазы составляют из двух частей, которые соединяют параллельно или последовательно. При этом число пар полюсов изменяется в два раза.

Рис. 7. Схемы переключения обмоток асинхронного двигателя: а — с одинарной звезды на двойную; б — с треугольника на двойную звезду
Регулирование скорости путем изменения числа пар полюсов экономично, а механические характеристики сохраняют жесткость. Недостатком этого способа является ступенчатый характер изменения частоты вращения асинхронного двигателя с короткозамкнутым ротором. Выпускаются двухскоростные двигатели с числом полюсов 4/2, 8/4, 12/6. Четырехскоростной электродвигатель с полюсами 12/8/6/4 имеет две переключаемые обмотки.
Использованы материалы книги Дайнеко В.А., Ковалинский А.И. Электрооборудование сельскохозяйственных предприятий.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Реостатное регулирование угловой скорости асинхронных двигателей




![]()
![]()
Введение резисторов в цепь ротора (реостатное регулирование) позволяет, как и для двигателей постоянного тока, регулировать угловую скорость двигателя. Регулирование осуществляется вниз от основной угловой скорости. Плавность регулирования зависит от числа ступеней включаемых резисторов.
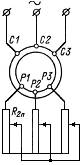
Для асинхронных двигателей с фазным ротором применяется регулирование скорости путем изменения сопротивлений в цепи ротора, а для двигателей с короткозамкнутым ротором используются сопротивления в цепи статора, как это показано на рис. 6.1
 а)
а) 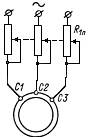 б)
б)
Рисунок 6.1–Схемы включения резисторов в цепь ротора а) и статора б)
 (6-1)
(6-1)
Согласно выражениям (6-1) при увеличении активного сопротивления вторичной цепи увеличивается критическое скольжение, и механическая характеристика становится более мягкой (см. рис. 6.2).
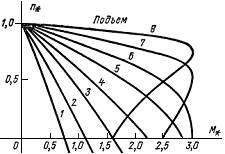
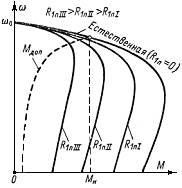
Рисунок 6.2 – Механические характеристики асинхронного двигателя при регулировании скорости изменением сопротивления в цепи ротора а) и статора б)
При увеличении скольжения в 2 раза по сравнению с номинальным, т. е. при снижении скорости всего лишь на 8  15%, допустимый момент уменьшается в 2 раза. По этой причине диапазон регулирования обычно не превышает (1,5 2):1.
15%, допустимый момент уменьшается в 2 раза. По этой причине диапазон регулирования обычно не превышает (1,5 2):1.
При неизменном моменте нагрузки и реостатном управлении потери мощности в роторной цепи изменяются пропорционально скольжению, а потери в статоре не зависят от скольжения и остаются неизменными при данном моменте нагрузки. Если, например, скорость двигателя снижена вдвое по сравнению с номинальной, то примерно половина всей потребляемой из сети мощности теряется в регулировочных резисторах. Следовательно, с ростом регулировочного сопротивления при одном и том же скольжении снижается к. п. д.
К недостаткам реостатного регулирования скорости относятся также мягкость механических характеристик и зависимость диапазона регулирования от величины нагрузки. В частности, регулирование скорости на холостом ходу практически невозможно.
Реостатное регулирование благодаря своей простоте находит практическое применение, например, в приводе подъемно-транспортных устройств, вентиляторов и насосов малой и средней мощности (до 100 кВт).
Источник
БЛОГ ЭЛЕКТРОМЕХАНИКА
Блог судового электромеханика. Электроника, электромеханика и автоматика на судне. Обучение и практика. В помощь студентам и специалистам
25.10.2014
Реостатное управление электродвигателем
Реостатное управление является простейшим способом управления двигателем. При этом способе обычно осуществляется пуск, остановка и в некоторых случаях регулирование скорости вращения (для электродвигателей постоянного тока).
При постоянном токе пусковой реостат включается последовательно с обмоткой якоря электродвигателя. Сопротивление обмотки якоря очень незначительно (оно измеряется сотыми или десятыми долями ома), и если бы в момент пуска электродвигателя в ход подключить ее непосредственно к сети на полное напряжение последней, то по обмотке пройдет очень большой ток, который может сжечь изоляцию обмотки. Вводя последовательно обмотке якоря пусковой реостат, мы увеличиваем сопротивление цепи и, следовательно, уменьшаем проходящий в обмотке ток.
Когда якорь вследствие взаимодействия между проходящим по его обмотке током и магнитным полем приходит во вращение, то в обмотке якоря, последовательно с которой в первый момент бывает включено все сопротивление пускового реостата, возникает противоэлектродвижущая сила. Ток в обмотке якоря определяется разностью напряжения на зажимах двигателя и противоэлектродвижущей силы (U — Е): чем меньше эта разность, тем меньше ток в цепи якоря; с увеличением скорости вращения ротора двигателя растет и противоэлектродвижущая сила, поэтому разность U — Е уменьшается. Вследствие этого возрастание тока в обмотке и увеличение скорости вращения якоря прекращаются.
Якорь вращается со скоростью, меньшей нормальной. Тогда передвижением рукоятки пускового реостата выводят часть (секцию или ступень) его сопротивления из цепи якоря. Вследствие этого ток в якоре возрастает, увеличивается скорость вращения якоря и растет противоэлектродвижущая сила, уменьшается ток и устанавливается новая (большая чем первая) скорость вращения ротора. Затем выводят из цепи якоря следующую ступень реостата и т. д., пока все сопротивление реостата не будет выведено из цепи якоря. При полностью выведенном сопротивлении реостата электродвигатель развивает полное (нормальное) число оборотов, противоэлектродвижущая сила достигает наибольшего значения, и ток в якоре, даже при выведенном сопротивлении, не достигает значений, угрожающих изоляции обмотки.
Таким образом, в начале пуска электродвигателя в ход пусковой реостат должен быть полностью введен в цепь якоря, а к концу пуска — полностью выведен. Пуск электродвигателя занимает лишь несколько секунд. Пусковой реостат не рассчитан на длительное прохождение по нему тока, поэтому оставлять долго ту или иную ступень (секцию) его под током нельзя. Однако и слишком быстрое выведение реостата из цепи якоря также недопустимо, так как изоляция обмотки якоря может при этом сгореть. Передвигать рукоятку реостата следует не слишком быстро, плавно, без рывков.
При реостатном управлении регулирование скорости электродвигателя осуществляется путем изменения его магнитного потока.
Рассмотрим соединение регулировочного реостата с двигателем параллельного возбуждения, изображенное на рис. 1.
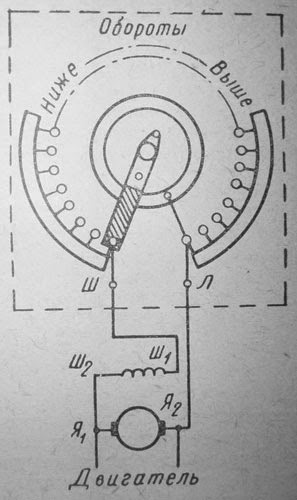
В показанном на рисунке положении ток от одного зажима Я1 электродвигателя идет по обмотке возбуждения Ш2 — Ш1, поступает в клемму реостата Ш, а отсюда через рукоятку реостата, плоское контактное кольцо и клемму Л возвращается ко второму полюсу Я2 двигателя. При этом ток не проходит по спиралям реостаа сопротивление реостата, как говорят, выведено. Поэтому по обмотке возбуждения Ш1 — Ш2 будет протекать полный намагничивающий ток. Если же передвинуть рукоятку реостата по часовой стрелке, то в цепь возбуждения окажется включенной часть сопротивления реостата. Тогда сила тока возбуждения и магнитный поток уменьшатся, скорость вращения якоря возрастет.
В тех случаях, когда необходимо во время работы увеличивать и уменьшать скорость вращения приводимого механизма, применяется электродвигатель с номинальным числом оборотов, несколько меньшим, чем требуется для нормальной работы машины (станка, насоса и т. д.). Так, если показанный на рис. 1 электродвигатель имеет номинальное число оборотов, меньшее, чем требуется для нормальной работы приводимого механизма, то, поставив рукоятку регулировочного реостата вертикально (заштрихованным концом вверх), т. е. введя в цепь обмотки возбуждения половину сопротивления реостата, мы тем самым увеличим скорость двигателя до нормальной. А когда потребуется изменить эту скорость, то мы можем: а) двигая рукоятку реостата влево, уменьшить скорость двигателя, так как при этом мы уменьшаем сопротивление цепи возбуждения, т. е. увеличиваем ток возбуждения и, следовательно, создаваемый последним магнитный поток, б) двигая рукоятку реостата вправо, увеличить число оборотов, так как при этом мы увеличиваем сопротивление цепи возбуждения, т. е. уменьшаем ток возбуждения и, следовательно, магнитный поток.
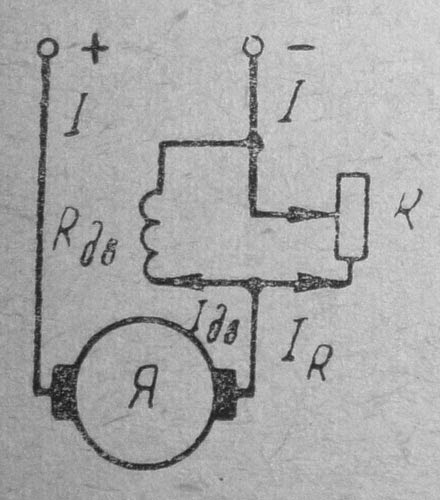
Для регулирования скорости вращения двигателя последовательного возбуждения путем изменения магнитного потока регулировочный реостат соединяется с электродвигателем так, как показано на рис. 2. Регулировочный реостат R включается параллельно обмотке возбуждения Rдв. Ток сети I, пройдя через якорь Я, разветвляется: часть его Iдв проходит в обмотке возбуждения и часть Iд — в сопротивлении реостата. При уменьшении сопротивления реостата ток в обмотке возбуждения уменьшится и скорость двигателя увеличится. Надо заметить, что регулирование этим способом скорости вращения двигателя последовательного возбуждения сопровождается гораздо большей потерей электроэнергии, чем регулирование скорости двигателя параллельного возбуждения, т.к. величина тока, проходящего в регулировочном реостате двигателя последовательного возбуждения, достигает сравнительно большой величины. Сам реостат получается при этом громоздким и более дорогим, чем регулировочный реостат двигателя параллельного возбуждения.
Регулировочные реостаты применяются не всегда, так как в целом ряде случаев регулирования скорости двигателей не требуется.
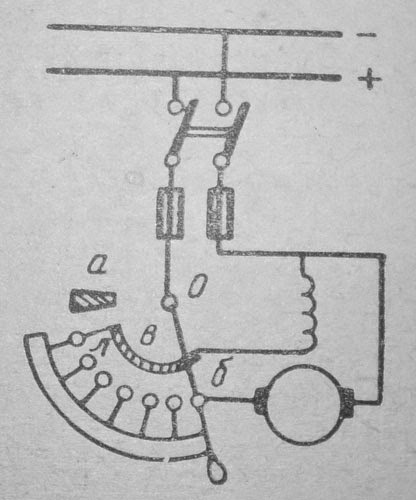
На рис.3 приведена упрощенная принципиальная схема присоединения к сети двигателя параллельного возбуждения. Двигатель присоединяется к сети через двухполюсный рубильник и следующий за рубильником двухполюсный предохранитель (для того чтобы в случае перегорания плавкой вставки предохранителя можно было разомкнуть рубильник и заменить перегоревшую вставку новой, не подвергаясь опасности поражения электрическим током). Включенный последовательно с обмоткой якоря пусковой реостат имеет холостой контакт а. При подготовке двигателя к пуску в ход рукоятка пускового реостата обязательно должна быть установлена на холостом контакте, при этом цепь реостата (и, следовательно, цепь якоря) разомкнута. При пуске двигателя в ход сначала замыкают двухполюсный рубильник, а затем рукоятку реостата переводят с холостого контакта на ближайший к нему рабочий контакт, замыкая цепь якоря.
Одновременно с этим обмотка возбуждения оказывается подключенной на полное напряжение сети через изогнутую планку реостата в.
Перемещая затем рукоятку пускового реостата вправо не слишком быстрым, плавным движением, устанавливают ее на последнем рабочем контакте б, т. е. постепенно выводят все сопротивление реостата из цепи якоря, вследствие чего скорость двигателя достигает номинальной величины.
При остановке двигателя рекомендуется отключить его от сети пусковым реостатом, для чего переводят рукоятку его быстрым движением на холостой контакт и тем самым разрывают цепь якоря, после чего размыкают рубильник. Если соединить проводником л контактную планку с первым рабочим контактом, то при переводе рукоятки реостата на холостой контакт мы не разрываем цепь обмотки возбуждения: она оказывается при этом замкнутой через реостат на обмотку якоря. Вследствие этого электродвижущая сила самоиндукции не может достигнуть значительной величины, и следовательно, опасность пробоя изоляции обмотки возбуждения устраняется.
Очень часто при остановке двигателя размыкают сначала рубильник, а затем уже переводят рукоятку реостата на холостой контакт.

При любом из этих двух способов рукоятка пускового реостата после остановки двигателя обязательно должна оставаться на холостом контакте для того, чтобы при новом пуске двигателя в ход не могло быть произведено ошибочного включения его в сеть при выведенном из цепи якоря реостате. Существуют пусковые реостаты, снабженные автоматическим устройством, переводящим рукоятку на холостой контакт, когда двигатель останавливается или исчезает напряжение в сети.
Реостатный пуск у электродвигателей переменного тока применяется для асинхронных двигателей с фазным ротором (рис. 4). При пуске такого двигателя сначала замыкается рубильник, включающий в сеть обмотки статора, затем постепенно выводят сопротивление реостата. В конечном его положении обмотки ротора замыкаются накоротко, а электродвигатель развивает номинальное число оборотов.
Источник



