
- Регулирование скорости двигателей постоянного тока
- Регулирование скорости оборотов двигателя постоянного тока
- Методы регулировки
- Заключение
- Регулирование частоты вращения электродвигателей
- Подписка на рассылку
- Методы регулирования частоты вращения электродвигателя
- Частотное регулирование
- Регулирование изменением числа пар полюсов
- Изменение питающего напряжения
- Добавочное сопротивление в цепи ротора
- Асинхронный вентильный каскад
- Изменение напряжения питания якоря
- Введение добавочного резистора в цепь якоря
Регулирование скорости двигателей постоянного тока
 Из уравнения электромеханической характеристики двигателя постоянного тока независимого возбуждения следует, что возможны три способа регулирования его угловой скорости:
Из уравнения электромеханической характеристики двигателя постоянного тока независимого возбуждения следует, что возможны три способа регулирования его угловой скорости:
1) регулирование за счет изменения величины сопротивления реостата в цепи якоря,
2) регулирование за счет изменения потока возбуждения двигателя Ф,
3) регулирование за счет изменения подводимого к обмотке якоря двигателя напряжения U . Ток в цепи якоря I я и момент М, развиваемый двигателем, зависят только от величины нагрузки на его валу.
Рассмотрим первый способ регулирования скорости двигателя постоянного тока изменением сопротивления в цепи якоря . Схема включения двигателя для этого случая представлена на рис. 1 , а электромеханические и механические характеристики — на рис. 2 , а.
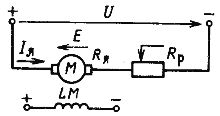
Рис. 1. Схема включения двигателя постоянного тока независимого возбуждения
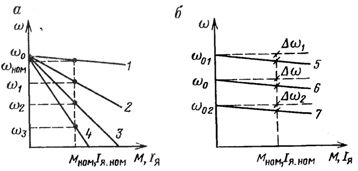
Рис. 2. Механические характеристики двигателя постоянного тока при различных сопротивлениях цепи якоря (а) и напряжениях (б)
Изменяя сопротивление реостата в цепи якоря можно получить при номинальной нагрузке различные угловые скорости электродвигателя на искусственных характеристиках — ω1, ω2, ω3.
Проведем анализ данного способа регулирования угловой скорости двигателей постоянного тока с помощью основных технико-экономических показателей. Так как при данном способе регулирования изменяется жесткость характеристик в широких пределах, то при скоростях менее половины номинальной стабильность работы двигателя резко ухудшается. По этой причине диапазон регулирования скорости ограничен ( D = 2 — З).
Скорость при данном способе можно регулировать в сторону уменьшения от основной, о чем свидетельствуют электромеханические и механические характеристики. Высокую плавность регулирования трудно обеспечить, так как потребовалось бы значительное количество ступеней регулирования и соответственно большое число контакторов. Полное использование двигателя по току (нагреву) в этом случае достигается при регулировании с постоянным моментом нагрузки.
Недостатком рассматриваемого способа является наличие значительных потерь мощности при регулировании, которые пропорциональны относительному изменению угловой скорости. Достоинством рассмотренного способа регулирования угловой скорости являются простота и надежность схемы управления.
Учитывая большие потери в реостате при малых скоростях, данный способ регулирования скорости применяется для приводов с кратковременным и повторно-кратковременным режимами работы.
 При втором способе регулирование угловой скорости двигателей постоянного тока независимого возбуждения осуществляется изменением величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата. При ослаблении потока угловая скорость двигателя как при нагрузке, так и при холостом ходе возрастает, а при усилении потока — уменьшается. Практически возможно изменение скорости только в сторону увеличения ввиду насыщения двигателя.
При втором способе регулирование угловой скорости двигателей постоянного тока независимого возбуждения осуществляется изменением величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата. При ослаблении потока угловая скорость двигателя как при нагрузке, так и при холостом ходе возрастает, а при усилении потока — уменьшается. Практически возможно изменение скорости только в сторону увеличения ввиду насыщения двигателя.
При увеличении скорости ослаблением потока допустимый момент двигателя постоянного тока изменяется по закону гиперболы, а мощность остается постоянной. Диапазон регулирования скорости для данного способа D = 2 — 4 .
Механические характеристики для различных значений потока двигателя приведены на рис. 2 , а и 2 , б, из которых видно, что характеристики в пределах номинального тока имеют высокую степень жесткости.
Обмотки возбуждения двигателей постоянного тока независимого возбуждения обладают значительной индуктивностью. Поэтому при ступенчатом изменении сопротивления реостата в цепи обмотки возбуждения ток, а следовательно, и поток будут изменяться по экспоненциальному закону. В связи с этим регулирование угловой скорости будет осуществляться плавно.
Существенными преимуществами данного способа регулирования скорости являются его простота и высокая экономичность.
Данный способ регулирования используют в приводах в качестве вспомогательного, обеспечивающего повышение скорости при холостом ходе механизма.
Третий способ регулирования скорости заключается в изменении напряжения, подводимого к обмотке якоря двигателя. Угловая скорость двигателя постоянного тока независимо от нагрузки изменяется прямо пропорционально напряжению, подводимому к якорю. Поскольку все регулировочные характеристики являются жесткими, а степень их жесткости остается для всех характеристик неизменной, работа двигателя является стабильной на всех угловых скоростях и, следовательно, обеспечивается широкий диапазон регулирования скорости независимо от нагрузки. Этот диапазон равен 10 и может быть расширен за счет специальных схем управления.
При данном способе угловую скорость можно уменьшать и увеличивать относительно основной. Повышение скорости ограничено возможностями источника энергии с регулируемым напряжением и U ном двигателя.
Если источник энергии обеспечивает возможность непрерывного изменения подводимого к двигателю напряжения, то регулирование скорости двигателя будет плавным.
Данный способ регулирования является экономичным, так-так регулирование угловой скорости двигателя постоянного тока независимого возбуждения осуществляется без дополнительных потерь мощности в силовой цепи якоря. По всем перечисленным выше показателям данный способ регулирования по сравнению с первым и вторым наилучший.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Регулирование скорости оборотов двигателя постоянного тока
С точки зрения регулирования скоростью вращения электродвигателей, интересно уравнение для электромеханических характеристик, соответствующее Второму закону Кирхгофа:
ω = U/C×Φ – ΥЯ /( C×Φ) 3 ×M
При описании технических характеристик электродвигателя скорость, выражаемая оборотами в минуту, зачастую называется частотой вращения ν по известному соотношению:
ω = 2p/T = 2pn
Поэтому эти две разноименные величины часто применяются в одном и том же смысле. Скорость w (частота ν) находится в прямой зависимости от напряжения питания U и в обратной от магнитного потока Ф. Исходя из приведенной выше формулы, возникает вывод, что скоростью можно управлять, регулируя сопротивление якоря, магнитный поток и напряжение питания.

Методы регулировки
Итак, различают три основных варианта регулирования скоростью:
- Изменением напряжения сети. Меняя подводимое питание можно управлять частотой вращения двигателя;
- Добавлением пускового реостата в цепь якоря. Регулируя сопротивление, можно уменьшить скорость вращения;
- Управлением магнитного потока. Двигатели с электромагнитами дают возможность регулировать поток путем изменения тока возбуждения. Однако нижний предел ν min ограничен насыщением магнитной цепи двигателя, что не позволяет увеличивать в большой степени магнитный поток.
К каждому из вариантов соответствует определённая зависимость механических характеристик.
Методы регулирования применительны к двигателям с различными:
- типами возбуждения;
- величиной мощности.
На практике в современных электрических моторах, в связи с недостатками и ограниченности диапазонов, рассмотренные методы не всегда применяются.
Это еще связано с тем, что машины отличаются довольно небольшими КПД, и к тому же не позволяют плавно увеличивать или уменьшать частоту вращения.
Электронные же схемы управления с регуляторами частоты, работающими от аккумуляторной батареи на 12 В, напротив, широко используются. Например, они очень актуальны для управления низковольтными электродвигателями 12 вольт в приборах автоматики, детских игрушках, электрических велосипедах, аккумуляторных детских автомобилях.

Принципиальной особенностью метода является то, что ток в цепи якоря и момент, развиваемый электродвигателем, зависят лишь от величины нагрузки на его валу. Регулировка осуществляется с помощью регулятора оборотов электродвигателя.
В течение очень долгого времени тиристорные преобразователи являлись единственным коммерчески доступными регуляторами двигателей. К слову сказать, они по-прежнему самые распространенные на сегодняшний день. Однако с появлением силовых транзисторов стали наиболее популярными регуляторы оборотов двигателя постоянного тока с широтно-импульсной модуляцией. Приведём для примера ниже схему, работающую от источника постоянного тока 12 В.
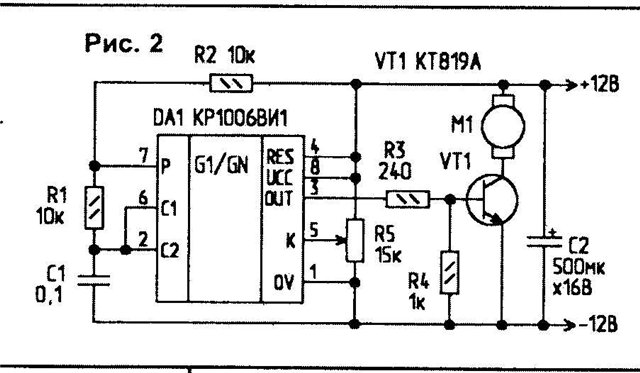
Схема на практике даёт возможность, к примеру, увеличивать либо уменьшать яркость свечения ламп накаливания на 12 вольт.
Последовательно-параллельное управление используется в ситуациях, когда два или более агрегата постоянного тока соединены механически. Схема с последовательным соединением электродвигателей, в которой общее напряжение делится на всех, используется для низкоскоростных приложений. Схема с параллельным соединением машин, имеющих одинаковое напряжение, используется в высокоскоростных применениях.
Заключение
Рассмотренный метод регулировки напряжения сети считается самым эффективным и экономичным вариантом, так как:
- им обеспечивается широкий диапазон изменения скоростей (wmin / wmax) и лучшие энергетические характеристики (КПД);
- он работает без каких-либо потерь мощности в силовой цепи якоря.
Управление осуществляется плавно, и по точности регулировка частоты вращения является весьма высокой.
Источник
Регулирование частоты вращения электродвигателей
Подписка на рассылку
Порядка 70% потребляемой промышленностью мощности, приходится на электропривод. Огромное разнообразие технологических процессов диктует свои правила, вследствие чего, появилась необходимость в изменении скорости вращения электродвигателя непосредственно во время технологического процесса. В данной статье мы раскроем различные способы регулирования скорости вращения электродвигателей.
Параметры, изменив которые, мы изменим скорость двигателя переменного тока (ДПТ):
- частота напряжения;
- число пар полюсов;
- величина напряжения;
- добавочное сопротивление в цепи ротора;
- вентильный каскад.
Изменяемые параметры для ДПТ:
- напряжение питания;
- сопротивление цепи обмотки якоря;
- магнитный поток.
Методы регулирования частоты вращения электродвигателя
Далее мы подробно рассмотрим эти способы и их применимость к различным типам электродвигателей.
Частотное регулирование
Наиболее эффективный, постоянно совершенствующийся способ.
Применение: двигатели переменного тока (синхронные и асинхронные с кз ротором).
Корректируя частоту питающего напряжения, мы изменим угловую скорость магнитного поля статора, следовательно, скорость двигателя в значительном диапазоне, имея достаточно жесткие механические характеристики. Для сохранения в норме коэффициента мощности и допустимости кратковременных перегрузок, меняя частоту, следует изменять и саму величину питающего напряжения.
Преимущества способа:
- обширный диапазон регулировки;
- «жесткость» механических характеристик;
- минимум потерь «скольжения», мощности.
Недостаток — высокая стоимость (в последние годы становится менее актуально).
Регулирование изменением числа пар полюсов
Применение: т.к. промышленность не выпускает серийно синхронные двигатели с изменяемым количеством пар полюсов, будем считать, что способ актуален только для асинхронных двигателей (далее АД) с кз ротором.
Способ реализуется изменением числа пар полюсов у обмоток. Этого можно добиться, изготовив двигатель с двумя независимыми обмотками. Но этот метод приводит к удорожанию конструкции и увеличению размеров машины. Поэтому наиболее выгодным является увеличение числа пар полюсов без использования второй независимой обмотки.
Промышленностью выпускаются двухскоротсные, трёхскоростные и четырёхскоростные электродвигатели.
Достоинства:
- экономичность;
- «жёсткие» механические характеристики.
Недостатки:
- ограниченное количество возможных скоростей;
- ступенчатость переключения скоростей.
Изменение питающего напряжения
Применение: асинхронные двигатели.
Изменять напряжение на статоре можно, включая в его цепь резисторы (старый и неэкономичный способ), автотрансформаторы или тиристорные регуляторы.
При регулировании скорости изменением напряжения, критический момент пропорционален квадрату подводимого напряжения. Снижается устойчивость к кратковременным перегрузкам и КПД, поэтому метод предпочтителен при «вентиляторной» нагрузке. Еще один недостаток — малый диапазон регулирования.
Добавочное сопротивление в цепи ротора
Применение: АД с фазным ротором.
При изменении сопротивления ротора прямо пропорционально изменяется скольжение. Но величина критического момента остается постоянной. Это позволяет подобрать сопротивления так, чтобы уравнять критический момент с пусковым, что благоприятно сказывается на пуске двигателя под нагрузкой.
Достоинства способа:
- простота реализации;
- критический момент = const;
Недостатки:
- большие потери (при изменении скорости половина мощности тратится на выделение тепла);
- малый диапазон;
- «мягкие» механические характеристики.
Асинхронный вентильный каскад
Применение: АД с фазным ротором.
Смысл регулирования каскадными схемами заключается в подаче в цепь ротора добавочной ЭДС. Изменяя добавочную ЭДС ротора, мы изменяем ток ротора, а значит его момент и скорость. Создать добавочную ЭДС, помимо устройства вентильного каскада, может и ДПТ — машинно-вентильный каскад.
Достоинства:
- Минимум сопутствующей силовой и контактной аппаратуры;
- плавность регулировок;
- малая мощность управления.
Недостатки:
- стоимость;
- низкий коэффициент мощности;
- плохая устойчивость к перегрузкам.
Изменение напряжения питания якоря
Применение: любые ДПТ.
Способ можно использовать если источником электрической энергии является генератор. Реализовать от общей сети невозможно.
Достоинства:
- плавность регулировок;
- простота пусков и торможений;
- экономичность.
Недостатки:
- необходимость трехкратного преобразования энергии→низкий КПД;
- три электрические машины в системе;
- дорогая эксплуатация.
Введение добавочного резистора в цепь якоря
Применение: любые ДПТ.
Заключается в последовательном включении в цепь якоря регулировочного реостата. Но способ не получил распространения ввиду своей неэкономичности и плохого влияния на КПД двигателя, т.к. в цепи реостата теряется очень большое количество энергии.
Регулирование изменением магнитного потока
В цепь возбуждения двигателей параллельного и смешанного возбуждения подключается реостат. В машинах последовательного возбуждения изменение магнитного потока в обмотке возбуждения производится шунтированием этой обмотки регулируемым сопротивлением. Максимальная скорость вращения двигателя ограничивается лишь механической прочностью якоря. Скорость двигателя регулируется в диапазонах 2:1-5:1, в частных случаях 8-10:1.
Преимущества:
- минимальные потери→экономичность;
- широкий диапазон регулирования
Недостатки:
- невозможно бесконечно уменьшать ток в обмотке возбуждения, двигатель уйдет «в разнос».
Источник



