
Способы регулирования мощности двигателя это
Во время работы двигателя его мощность или крутящий момент при заданных частотах вращения должны быть равны мощности или крутящему моменту потребителя. В случае несоответствия между развиваемой двигателем мощностью и нагрузкой со стороны потребителя двигатель может чрезмерно увеличить частоту вращения (пойти вразнос) или, наоборот, значительно ее уменьшить и остановиться. Режим работы двигателя, при котором частота вращения, крутящий момент или мощность в рассматриваемый период остаются постоянными, называется установившимся режимом.
При изменении сопротивления внешней сети, если двигатель работает на электрогенератор, или при изменении сопротивления движению транспортного средства необходимо соответствующее регулирование мощности двигателя, чтобы обеспечить его устойчивую работу.
Среднее индикаторное давление зависит в основном от следующих параметров.
1. Массы свежего заряда в цилиндре, оцениваемой коэффициентом наполнения и плотностью р« воздуха или горючей смеси на входе в цилиндр. С ростом массы свежего заряда возрастает количество теплоты, выделяющейся при сгорании, а следовательно, давление.
2. Теплоты сгорания горючей смеси, теоретически необходимое количество воздуха для полного сгорания 1 кг топлива. При увеличении теплоты сгорания горючей смеси возрастает количество теплоты, выделяющейся при сгорании, и соответственно среднее индикаторное давление. При работе двигателя на топливе определенного вида изменение теплоты сгорания горючей смеси возможно лишь путем изменения качества смеси, т. е. коэффициента а избытка воздуха. С увеличением коэффициента избытка воздуха горючая смесь обедняется и понижается индикаторное давление, при уменьшении коэффициента а горючая смесь обогащается и давление, повышается.
Рекламные предложения на основе ваших интересов:
Вследствие этого возможны два основных способа регулирования.
Первый способ — изменение массы свежего заряда, поступающего в цилиндр двигателя. В этом случае для понижения мощности двигателя уменьшают массу свежего заряда без изменения состава горючей смеси. Такой способ регулирования называется количественным регулированием и практически осуществляется путем установки дополнительного сопротивления в виде дроссельной заслонки во впускном трубопроводе. В результате дросселирования свежего заряда давление его уменьшается. Чем больше прикрыто проходное сечение, тем выше сопротивление впуска и меньше наполнение цилиндра, а следовательно, развиваемая двигателем мощность.
Существенным недостатком количественного регулирования является увеличение насосных потерь вследствие дросселирования и значительное снижение давления в конце сжатия при работе на малых нагрузках. К преимуществу этого способа регулирования следует отнести то, что при этом можно выбрать рациональный коэффициент избытка воздуха, обеспечивающий хорошее сгорание топлива на всех режимах работы двигателя.
При втором способе регулирования остается постоянным количество воздуха, поступающего в цилиндр, но меняется расход впрыскиваемого через форсунку топлива, что приводит к изменению качества горючей смеси (коэффициента а), а следовательно, теплоты сгорания горючей смеси и развиваемой двигателем мощности. Этот способ регулирования называется качественным регулированием.
Значительное изменение состава горючей смеси при качественном регулировании обусловливает невозможность его применения в двигателях с внешним смесеобразованием: при увеличении коэффициента избытка воздуха обедняется горючая смесь, что приводит к понижению скорости сгорания, мощности и ухудшению экономичности двигателя. При слишком обедненной смеси появляются пропуски зажигания, работа двигателя становится неустойчивой и возможна его остановка.
Изменение среднего индикаторного давления (или работы цикла) возможно лишь путем изменения количества теплоты, выделившейся при сгорании топлива (или количества топлива), если потери постоянны.
Количественное регулирование применяется в двигателях с внешним смесеобразованием и принудительным воспламенением (карбюраторные и газовые двигатели).
Качественное регулирование используется в дизелях. При смешанном регулировании сочетаются преимущества количественного и качественного регулирования.
Специфические особенности образования рабочей смеси и процесса сгорания в дизелях определяют возможность быстрого воспламенения и полного сгорания топлива при больших коэффициентах избытка воздуха.
В газовых двигателях применяют так называемое смешанное регулирование. При смешанном регулировании увеличения или уменьшения мощности в области больших нагрузок достигают путем изменения состава смеси в пределах допустимых значений а, в области малых нагрузок — путем изменения расхода смеси.
Автоматическое регулирование мощности для поддержания постоянной частоты вращения любым из указанных выше способов обычно осуществляется с помощью регуляторов частоты вращения. Регулятор частоты вращения автоматически управляет подачей горючей смеси или топлива в цилиндр на заданном скоростном режиме работы двигателя. При помощи регулятора можно ограничивать максимальную частоту вращения двигателя, обеспечивать устойчивую работу его при минимальной частоте вращения холостого хода и поддерживать заданный скоростной режим независимо от нагрузки.
Источник
9. Что такое «качественное» и «количественное» регулирование двс?
В стационарных двигателях число оборотов при изменении нагрузки должно по возможности сохраняться постоянным. Для этого при различных нагрузках необходимо увеличить или уменьшить количество топлива, подаваемого в рабочие цилиндры, что обеспечивается соответствующим регулированием. В зависимости от конструкции и системы двигателя регулирование может быть количественным, качественным и пропусками вспышек в цилиндре. При количественном регулировании изменяется количество смеси воздуха и топлива, подаваемого в цилиндр, без изменения состава смеси (желательно наивыгоднейшего). Этот способ регулирования обычно применяется в карбюраторных или газовых двигателях.
При качественном регулировании изменяется количество топлива без изменения количества воздуха. Такой способ регулирования применяется в дизелях. Здесь количество поступающего в цилиндр воздуха можно считать одним и тем же при всех нагрузках, количество же впрыскиваемого в цилиндр жидкого топлива (подаваемого насосом) меняется в зависимости от нагрузки
10. Кривошипно-шатунный механимзм
Основным звеном, воспринимающим работу газовых сил и передающим ее для использования, является кривошипно-шатунный механизм (рис.2), состоящий из поршня,
шатуна кривошипа коленчатого вала.
Кривошипно-шатунный механизм преобразует возвратно-поступательное движение поршня во вращательное движение коленчатого вала. 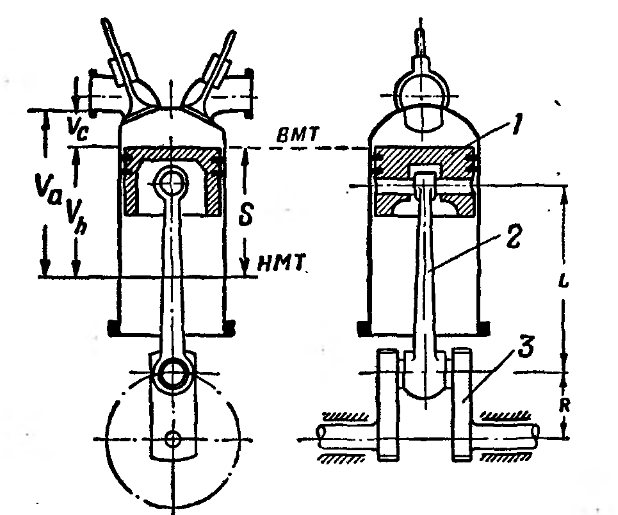
1 – поршень; 2 – шатун; 3 – кривошип коленчатого вала
При вращении коленчатого вала поршень, перемещаясь в цилиндре, достигает двух крайних положений, одно из которых, наиболее удаленное от оси коленчатого вала, называется верхней мертвой точкой (ВМТ), второе, наиболее близкое к оси коленчатого вала, называется нижней мертвой точкой (НМТ).
Положение ВМТ и НМТ определяется размерами шатуна и кривошипа. Основным размером шатуна является длина (L). Длиной шатуна называется расстояние от оси его верхней (поршневой) головки до оси нижней (кривошипной) головки. Размер кривошипа характеризуется его радиусом (R). Радиусом кривошипа называется расстояние от оси коренной шейки до оси шатунной шейки. Расстояние от ВМТ до НМТ называется ходом поршня (S). Ход поршня S = 2R соответствует 180 0 по углу поворота коленчатого вала.
11. Механизм газораспределения поршневого двс.
Газораспределительный механизм (ГРМ) предназначен для впрыска топлива и выпуска отработанных газов в двигателях внутреннего сгорания.
В верхней части блока цилиндров находится ГБЦ (головка блока цилиндров) с расположенными на ней распределительным валом, клапанами, толкателями или коромыслами. Шкив привода распредвала вынесен за пределы головки блока цилиндров. Ремень ГРМ или цепь одевается на шкив распредвала и приводится в действие шестерней коленчатого вала.
Распредвал представляет собой ось с проточенными на ней кулачками. Кулачки расположены по валу так, что в процессе вращения, соприкасаясь с толкателями клапанов, нажимают на них точно в соответствии с рабочими тактами двигателя.
Клапан нажимается коромыслом (ранние версии двигателей) или толкателем.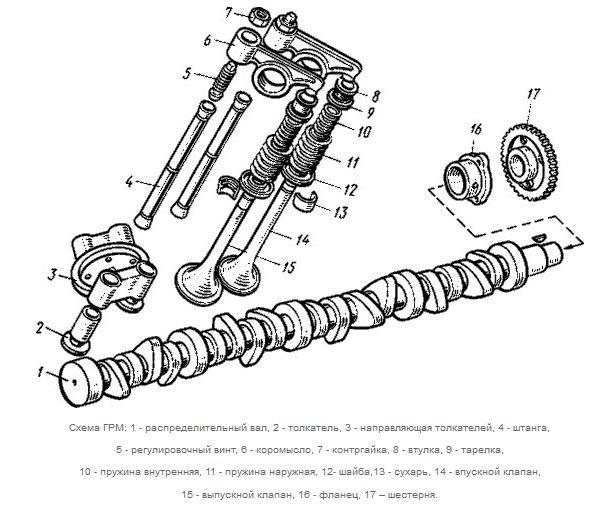
Источник
Регулирование скорости асинхронного двигателя
Наиболее распространены следующие способы регулирования скорости асинхронного двигателя : изменение дополнительного сопротивления цепи ротора, изменение напряжения, подводимого к обмотке статора, двигателя изменение частоты питающего напряжения, а также переключение числа пар полюсов.

Регулирование частоты вращения асинхронного двигателя путем введения резисторов в цепь ротора
Введение резисторов в цепь ротора приводит к увеличению потерь мощности и снижению частоты вращения ротора двигателя за счет увеличения скольжения, поскольку n = n о (1 — s).
Из рис. 1 следует, что при увеличении сопротивления в цепи ротора при том же моменте частота вращения вала двигателя уменьшается.
Жесткость механических характеристик значительно снижается с уменьшением частоты вращения, что ограничивает диапазон регулирования до (2 — 3) : 1. Недостатком этого способа являются значительные потери энергии, которые пропорциональны скольжению. Такое регулирование возможно только для двигателя с фазным ротором.
 Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Изменение напряжения, подводимого к обмотке статора асинхронного двигателя , позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Для этого между сетью переменного тока со стандартным напряжением U 1ном и статором электродвигателя включается регулятор напряжения .
При регулировании частоты вращения асинхронного двигателя изменением напряжения, подводимого к обмотке статора, критический момент М кр асинхронного двигателя изменяется пропорционально квадрату подводимого к двигателю напряжения U рет (рис. 3 ), а скольжение от U рег не зависит.

Рис. 1. Механические характеристики асинхронного двигателя с фазным ротором при различных сопротивлениях резисторов, включенных в цепь ротора

Рис. 2. Схема регулирования скорости асинхронного двигателя путем изменения напряжения на статоре

Рис. 3. Механические характеристики асинхронного двигателя при изменении напряжения подводимого к обмоткам статора
Если момент сопротивления рабочей машины больше пускового момента электродвигателя (Мс > Мпуск), то двигатель не будет вращаться, поэтому необходимо запустить его при номинальном напряжении Uном или на холостом ходу.
Регулировать частоту вращения короткозамкнутых асинхронных двигателей таким способом можно только при вентиляторном характере нагрузки. Кроме того, должны использоваться специальные электродвигатели с повышенным скольжением. Диапазон регулирования небольшой, до n кр.
Для изменения напряжения применяют трехфазные автотрансформаторы и тиристорные регуляторы напряжения.

Рис. 4. Схема замкнутой системы регулирования скорости тиристорный регулятор напряжения — асинхронный двигатель (ТРН — АД)
Замкнутая схема управления асинхронным двигателем , выполненным по схеме тиристорный регулятор напряжения — электродвигатель позволяет регулировать скорость асинхронного двигателя с повышенным скольжением (такие двигатели применяются в вентиляционных установках).
Регулирование частоты вращения асинхронного двигателя изменением частоты питающего напряжения
Так как частота вращения магнитного поля статора n о = 60 f /р, то регулирование частоты вращения асинхронного двигателя можно производить изменением частоты питающего напряжения.
 Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость n о магнитного поля статора.
Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость n о магнитного поля статора.
Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью.
Для получения высоких энергетических показателей асинхронных двигателей (коэффициентов мощности, полезного действия, перегрузочной способности) необходимо одновременно с частотой изменять и подводимое напряжение. Закон изменения напряжения зависит от характера момента нагрузки Мс. При постоянном моменте нагрузки напряжение на статоре должно регулироваться пропорционально частоте.
Схема частотного электропривода приведена на рис. 5, а механические характеристики АД при частотном регулировании — на рис. 6.

Рис. 5. Схема частотного электропривода

Рис. 6. Механические характеристики асинхронного двигателя при частотном регулировании
С уменьшением частоты f критический момент несколько уменьшается в области малых частот вращения. Это объясняется возрастанием влияния активного сопротивления обмотки статора при одновременном снижении частоты и напряжения.
Частотное регулирование скорости асинхронного двигателя позволяет изменять частоту вращения в диапазоне (20 — 30) : 1. Частотный способ является наиболее перспективным для регулирования асинхронного двигателя с короткозамкнутым ротором. Потери мощности при таком регулировании невелики, поскольку минимальны потери скольжения.
 Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока.
Силовой трехфазный импульсный инвертор содержит шесть транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя.
В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями. Регулирование выходной частоты I вых и выходного напряжения осуществляется за счет высокочастотной широтно-импульсной модуляции.
Регулирование частоты вращения асинхронного двигателя переключение числа пар полюсов
Ступенчатое регулирование скорости можно осуществить, используя специальные многоскоростные асинхронные двигатели с короткозамкнутым ротором.
Из выражения n о = 60 f /р следует, что при изменении числа пар полюсов р получаются механические характеристики с разной частотой вращения n о магнитного поля статора. Так как значение р определяется целыми числами, то переход от одной характеристики к другой в процессе регулирования носит ступенчатый характер.
Существует два способа изменения числа пар полюсов. В первом случае в пазы статора укладывают две обмотки с разным числом полюсов. При изменении скорости к сети подключается одна из обмоток. Во втором случае обмотку каждой фазы составляют из двух частей, которые соединяют параллельно или последовательно. При этом число пар полюсов изменяется в два раза.

Рис. 7. Схемы переключения обмоток асинхронного двигателя: а — с одинарной звезды на двойную; б — с треугольника на двойную звезду
Регулирование скорости путем изменения числа пар полюсов экономично, а механические характеристики сохраняют жесткость. Недостатком этого способа является ступенчатый характер изменения частоты вращения асинхронного двигателя с короткозамкнутым ротором. Выпускаются двухскоростные двигатели с числом полюсов 4/2, 8/4, 12/6. Четырехскоростной электродвигатель с полюсами 12/8/6/4 имеет две переключаемые обмотки.
Использованы материалы книги Дайнеко В.А., Ковалинский А.И. Электрооборудование сельскохозяйственных предприятий.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник



