
Регулирование скорости двигателей постоянного тока
 Из уравнения электромеханической характеристики двигателя постоянного тока независимого возбуждения следует, что возможны три способа регулирования его угловой скорости:
Из уравнения электромеханической характеристики двигателя постоянного тока независимого возбуждения следует, что возможны три способа регулирования его угловой скорости:
1) регулирование за счет изменения величины сопротивления реостата в цепи якоря,
2) регулирование за счет изменения потока возбуждения двигателя Ф,
3) регулирование за счет изменения подводимого к обмотке якоря двигателя напряжения U . Ток в цепи якоря I я и момент М, развиваемый двигателем, зависят только от величины нагрузки на его валу.
Рассмотрим первый способ регулирования скорости двигателя постоянного тока изменением сопротивления в цепи якоря . Схема включения двигателя для этого случая представлена на рис. 1 , а электромеханические и механические характеристики — на рис. 2 , а.
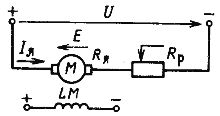
Рис. 1. Схема включения двигателя постоянного тока независимого возбуждения
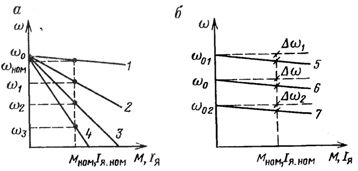
Рис. 2. Механические характеристики двигателя постоянного тока при различных сопротивлениях цепи якоря (а) и напряжениях (б)
Изменяя сопротивление реостата в цепи якоря можно получить при номинальной нагрузке различные угловые скорости электродвигателя на искусственных характеристиках — ω1, ω2, ω3.
Проведем анализ данного способа регулирования угловой скорости двигателей постоянного тока с помощью основных технико-экономических показателей. Так как при данном способе регулирования изменяется жесткость характеристик в широких пределах, то при скоростях менее половины номинальной стабильность работы двигателя резко ухудшается. По этой причине диапазон регулирования скорости ограничен ( D = 2 — З).
Скорость при данном способе можно регулировать в сторону уменьшения от основной, о чем свидетельствуют электромеханические и механические характеристики. Высокую плавность регулирования трудно обеспечить, так как потребовалось бы значительное количество ступеней регулирования и соответственно большое число контакторов. Полное использование двигателя по току (нагреву) в этом случае достигается при регулировании с постоянным моментом нагрузки.
Недостатком рассматриваемого способа является наличие значительных потерь мощности при регулировании, которые пропорциональны относительному изменению угловой скорости. Достоинством рассмотренного способа регулирования угловой скорости являются простота и надежность схемы управления.
Учитывая большие потери в реостате при малых скоростях, данный способ регулирования скорости применяется для приводов с кратковременным и повторно-кратковременным режимами работы.
 При втором способе регулирование угловой скорости двигателей постоянного тока независимого возбуждения осуществляется изменением величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата. При ослаблении потока угловая скорость двигателя как при нагрузке, так и при холостом ходе возрастает, а при усилении потока — уменьшается. Практически возможно изменение скорости только в сторону увеличения ввиду насыщения двигателя.
При втором способе регулирование угловой скорости двигателей постоянного тока независимого возбуждения осуществляется изменением величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата. При ослаблении потока угловая скорость двигателя как при нагрузке, так и при холостом ходе возрастает, а при усилении потока — уменьшается. Практически возможно изменение скорости только в сторону увеличения ввиду насыщения двигателя.
При увеличении скорости ослаблением потока допустимый момент двигателя постоянного тока изменяется по закону гиперболы, а мощность остается постоянной. Диапазон регулирования скорости для данного способа D = 2 — 4 .
Механические характеристики для различных значений потока двигателя приведены на рис. 2 , а и 2 , б, из которых видно, что характеристики в пределах номинального тока имеют высокую степень жесткости.
Обмотки возбуждения двигателей постоянного тока независимого возбуждения обладают значительной индуктивностью. Поэтому при ступенчатом изменении сопротивления реостата в цепи обмотки возбуждения ток, а следовательно, и поток будут изменяться по экспоненциальному закону. В связи с этим регулирование угловой скорости будет осуществляться плавно.
Существенными преимуществами данного способа регулирования скорости являются его простота и высокая экономичность.
Данный способ регулирования используют в приводах в качестве вспомогательного, обеспечивающего повышение скорости при холостом ходе механизма.
Третий способ регулирования скорости заключается в изменении напряжения, подводимого к обмотке якоря двигателя. Угловая скорость двигателя постоянного тока независимо от нагрузки изменяется прямо пропорционально напряжению, подводимому к якорю. Поскольку все регулировочные характеристики являются жесткими, а степень их жесткости остается для всех характеристик неизменной, работа двигателя является стабильной на всех угловых скоростях и, следовательно, обеспечивается широкий диапазон регулирования скорости независимо от нагрузки. Этот диапазон равен 10 и может быть расширен за счет специальных схем управления.
При данном способе угловую скорость можно уменьшать и увеличивать относительно основной. Повышение скорости ограничено возможностями источника энергии с регулируемым напряжением и U ном двигателя.
Если источник энергии обеспечивает возможность непрерывного изменения подводимого к двигателю напряжения, то регулирование скорости двигателя будет плавным.
Данный способ регулирования является экономичным, так-так регулирование угловой скорости двигателя постоянного тока независимого возбуждения осуществляется без дополнительных потерь мощности в силовой цепи якоря. По всем перечисленным выше показателям данный способ регулирования по сравнению с первым и вторым наилучший.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Двигатели постоянного тока. Регулирование координат электропривода?
Регулирование координат электропривода
Как отмечалось выше, основная функция электропривода состоит в управлении его координатами — скоростью и моментом, т.е. в их принудительном направленном изменении в соответствии с требованиями технологического обслуживаемого процесса.
Очень важный частный случай управления координатами — регулирование скорости или момента, т.е. принудительное изменение этих величин в установившемся режиме в соответствии с требованиями технологического процесса посредством воздействия на механическую характеристику двигателя. Частным случаем регулирования является поддержание одной из координат на требуемом уровне при независимом изменении другой координаты.
Чаще всего регулируемой координатой служит скорость: необходимо изменять скорость транспортного средства в зависимости от условий движения, состояния дороги и т.п., нужно регулировать скорость насоса, чтобы обеспечивать нужный напор в системе водоснабжения, требуется поддерживать на заданном уровне скорость движения жилы кабеля в процессе наложения на нее изоляции и т.п.
Понятие “регулирование скорости”, когда используются разные характеристики (рис. 7,а), не следует смешивать с изменением скорости, даже значительным, которое вызывается ростом или снижением нагрузки и происходит в соответствии с формой данной механической характеристики (рис. 7,б).

Рис. 7. Регулирование (а) и изменение (б) скорости
В ряде случаев оказывается необходимым регулирование момента. Оно потребуется, например, если нужно качественно укладывать на катушку проволоку, получаемую с волочильного стана, если при буксировке судна на больших волнах надо не допустить обрыва троса и т.п. Далее мы будем, в основном, рассматривать регулирование скорости.
Поскольку регулирование скорости связано с направленным формированием механических характеристик, выделим одну из возможных характеристик в качестве основной. Обычно в качестве основной характеристики принимают естественную характеристику двигателя, соответствующую номинальным значениям определяющих ее величин (напряжение, частота, магнитный поток и т.п.). Далее мы будем конкретизировать условия получения естественной характеристики для каждого типа двигателя.
Все другие характеристики, создаваемые в целях регулирования скорости, будем называть искусственными. Они могут формироваться разными способами, отличающимися как по техническим, так и по экономическим показателям, рассматриваемым ниже.
1. Направление регулирования. Искусственные характеристики, могут располагаться только ниже естественной — однозонное регулирование вниз от основной скорости, только выше естественной — однозонное регулирование вверх от основной скорости, как выше, так и ниже естественной — двухзонное регулирование.
2. Диапазон регулирования — отношение максимальной возможной скорости к минимальной  при заданных изменениях момента нагрузки — рис. 8. Легко видеть, что одинаковым естественным характеристикам и изменениям момента
при заданных изменениях момента нагрузки — рис. 8. Легко видеть, что одинаковым естественным характеристикам и изменениям момента  могут соответствовать сильно различающиеся диапазоны регулирования, что связано с жесткостью искусственных характеристик.
могут соответствовать сильно различающиеся диапазоны регулирования, что связано с жесткостью искусственных характеристик.

Рис. 8. К определению диапазона регулирования скорости
С жесткостью характеристик связан также еще один показатель — стабильность скорости на искусственных характеристиках. Она может быть низкая — рис. 8,а и высокая рис. 8,б; иногда требуется абсолютно жесткие характеристики (  ), иногда, напротив, нужны очень мягкие характеристики (регулирование момента).
), иногда, напротив, нужны очень мягкие характеристики (регулирование момента).
3. Плавность регулирования — возможность получать искусственные характеристики, расположенные как угодно близко друг к другу, — плавное регулирование или, наоборот, возможность иметь лишь несколько фиксированных характеристик —ступенчатое регулирование.
4. Допустимая нагрузка на искусственных характеристиках — очень важный показатель, определяющий надежность электропривода. Рассмотрим здесь лишь длительно допустимую нагрузку, которая определяется допустимым нагревом двигателя.
Допустимая нагрузка на естественной характеристике известна по определению — это номинальный момент двигателя Мн. Для упрощения задачи будем считать, пренебрегая изменением теплоотдачи, допустимым током в силовых целях при любой скорости номинальный ток двигателя Iн. Тогда допустимый момент для принудительно охлаждаемого двигателя
 (5)
(5)
будет зависеть от магнитного потока двигателя Ф на соответствующей искусственной характеристике. При регулировании с Ф = Фн = const Мдоп є IнФн = Мн. Грубая оценка (5) дает лишь общее представление о допустимых нагрузках и должна уточняться в каждом конкретном случае.
5. Экономичность регулирования оценивается потерями энергии, сопровождающими тот или иной способ регулирования. Иногда экономичность удается грубо оценить, сравнивая полезную мощность  с потребляемой из сети Р1, т.е. определяя потери
с потребляемой из сети Р1, т.е. определяя потери  или вычисляя КПД
или вычисляя КПД  в некоторой характерной точке:
в некоторой характерной точке:
 . (6)
. (6)
Значительно более серьезные и убедительные оценки экономичности регулирования при сравнении различных способов могут основываться на цикловом КПД 
 , (7)
, (7)
определяемом с учетом конкретных условий работы привода за время цикла tц.
6. Затраты на регулирование можно определить как стоимость дополнительного оборудования Ст. Обор., используемого для осуществления регулирования. Эффективность затрат удобно оценивать сроком их окупаемости Ток
 (8)
(8)
где Год.эфф.- цена годового эффекта от использования регулирования.
Так, если взамен нерегулируемого электропривода насоса используется частотно-регулируемый, и стоимость дополнительного оборудования — преобразователя частоты 1500 USD, а экономический эффект за счет сбережения электроэнергии, воды и тепла составляет 2100 USD/год, срок окупаемости составит
 года.
года.
Приведенные шесть показателей регулирования позволяют сравнивать в главных чертах и сопоставлять различные способы. Очевидно, что идеальным был бы способ, осуществляющий плавное двухзонное регулирование в широком диапазоне с примерно постоянной допустимой нагрузкой Мдоп» Мн, с малыми потерями, при низкой стоимости дополнительного оборудования. Очевидно, что такого идеального способа нет, и инженеру всегда приходится искать некоторый разумный компромисс. Здесь в последнее время широко используется неформализуемый, но удобный показатель “качество/цена”. В понятие “качество” входит некоторая определенным образом организованная и согласованная с пользователем совокупность перечисленных выше показателей, дополненная такими общетехническими показателями как надежность, ремонтопригодность, помехозащищённость, взаимодействие с сетью и т.п.
Правильно организованный и хорошо обоснованный интегральный показатель “качество-цена”- удобное средство продвижения нового товара на рынок.
Источник



