
Регулирование скорости асинхронного двигателя
Наиболее распространены следующие способы регулирования скорости асинхронного двигателя : изменение дополнительного сопротивления цепи ротора, изменение напряжения, подводимого к обмотке статора, двигателя изменение частоты питающего напряжения, а также переключение числа пар полюсов.

Регулирование частоты вращения асинхронного двигателя путем введения резисторов в цепь ротора
Введение резисторов в цепь ротора приводит к увеличению потерь мощности и снижению частоты вращения ротора двигателя за счет увеличения скольжения, поскольку n = n о (1 — s).
Из рис. 1 следует, что при увеличении сопротивления в цепи ротора при том же моменте частота вращения вала двигателя уменьшается.
Жесткость механических характеристик значительно снижается с уменьшением частоты вращения, что ограничивает диапазон регулирования до (2 — 3) : 1. Недостатком этого способа являются значительные потери энергии, которые пропорциональны скольжению. Такое регулирование возможно только для двигателя с фазным ротором.
 Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Изменение напряжения, подводимого к обмотке статора асинхронного двигателя , позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Для этого между сетью переменного тока со стандартным напряжением U 1ном и статором электродвигателя включается регулятор напряжения .
При регулировании частоты вращения асинхронного двигателя изменением напряжения, подводимого к обмотке статора, критический момент М кр асинхронного двигателя изменяется пропорционально квадрату подводимого к двигателю напряжения U рет (рис. 3 ), а скольжение от U рег не зависит.

Рис. 1. Механические характеристики асинхронного двигателя с фазным ротором при различных сопротивлениях резисторов, включенных в цепь ротора

Рис. 2. Схема регулирования скорости асинхронного двигателя путем изменения напряжения на статоре

Рис. 3. Механические характеристики асинхронного двигателя при изменении напряжения подводимого к обмоткам статора
Если момент сопротивления рабочей машины больше пускового момента электродвигателя (Мс > Мпуск), то двигатель не будет вращаться, поэтому необходимо запустить его при номинальном напряжении Uном или на холостом ходу.
Регулировать частоту вращения короткозамкнутых асинхронных двигателей таким способом можно только при вентиляторном характере нагрузки. Кроме того, должны использоваться специальные электродвигатели с повышенным скольжением. Диапазон регулирования небольшой, до n кр.
Для изменения напряжения применяют трехфазные автотрансформаторы и тиристорные регуляторы напряжения.

Рис. 4. Схема замкнутой системы регулирования скорости тиристорный регулятор напряжения — асинхронный двигатель (ТРН — АД)
Замкнутая схема управления асинхронным двигателем , выполненным по схеме тиристорный регулятор напряжения — электродвигатель позволяет регулировать скорость асинхронного двигателя с повышенным скольжением (такие двигатели применяются в вентиляционных установках).
Регулирование частоты вращения асинхронного двигателя изменением частоты питающего напряжения
Так как частота вращения магнитного поля статора n о = 60 f /р, то регулирование частоты вращения асинхронного двигателя можно производить изменением частоты питающего напряжения.
 Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость n о магнитного поля статора.
Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость n о магнитного поля статора.
Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью.
Для получения высоких энергетических показателей асинхронных двигателей (коэффициентов мощности, полезного действия, перегрузочной способности) необходимо одновременно с частотой изменять и подводимое напряжение. Закон изменения напряжения зависит от характера момента нагрузки Мс. При постоянном моменте нагрузки напряжение на статоре должно регулироваться пропорционально частоте.
Схема частотного электропривода приведена на рис. 5, а механические характеристики АД при частотном регулировании — на рис. 6.

Рис. 5. Схема частотного электропривода

Рис. 6. Механические характеристики асинхронного двигателя при частотном регулировании
С уменьшением частоты f критический момент несколько уменьшается в области малых частот вращения. Это объясняется возрастанием влияния активного сопротивления обмотки статора при одновременном снижении частоты и напряжения.
Частотное регулирование скорости асинхронного двигателя позволяет изменять частоту вращения в диапазоне (20 — 30) : 1. Частотный способ является наиболее перспективным для регулирования асинхронного двигателя с короткозамкнутым ротором. Потери мощности при таком регулировании невелики, поскольку минимальны потери скольжения.
 Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока.
Силовой трехфазный импульсный инвертор содержит шесть транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя.
В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями. Регулирование выходной частоты I вых и выходного напряжения осуществляется за счет высокочастотной широтно-импульсной модуляции.
Регулирование частоты вращения асинхронного двигателя переключение числа пар полюсов
Ступенчатое регулирование скорости можно осуществить, используя специальные многоскоростные асинхронные двигатели с короткозамкнутым ротором.
Из выражения n о = 60 f /р следует, что при изменении числа пар полюсов р получаются механические характеристики с разной частотой вращения n о магнитного поля статора. Так как значение р определяется целыми числами, то переход от одной характеристики к другой в процессе регулирования носит ступенчатый характер.
Существует два способа изменения числа пар полюсов. В первом случае в пазы статора укладывают две обмотки с разным числом полюсов. При изменении скорости к сети подключается одна из обмоток. Во втором случае обмотку каждой фазы составляют из двух частей, которые соединяют параллельно или последовательно. При этом число пар полюсов изменяется в два раза.

Рис. 7. Схемы переключения обмоток асинхронного двигателя: а — с одинарной звезды на двойную; б — с треугольника на двойную звезду
Регулирование скорости путем изменения числа пар полюсов экономично, а механические характеристики сохраняют жесткость. Недостатком этого способа является ступенчатый характер изменения частоты вращения асинхронного двигателя с короткозамкнутым ротором. Выпускаются двухскоростные двигатели с числом полюсов 4/2, 8/4, 12/6. Четырехскоростной электродвигатель с полюсами 12/8/6/4 имеет две переключаемые обмотки.
Использованы материалы книги Дайнеко В.А., Ковалинский А.И. Электрооборудование сельскохозяйственных предприятий.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
МЕТОДЫ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ




![]()
![]()
Во многих случаях трехфазные асинхронные двигатели применяются для приводов, не требующих регулирования частоты вращения. Но асинхронные двигатели обладают ценными преимуществами: надежностью, дешевизной, простотой конструкции, высоким КПД и относительно малой массой. По этим причинам естественно стремление применять их и для приводов с регулируемой частотой вращения.
Для регулирования частоты вращения асинхронных двигателей с коротко-замкнутым ротором обычно используются метод частотного регулирования, представляющий собой плавное регулирование частоты вращения магнитного поля путем регулирования частоты тока в обмотках статора, и метод изменения числа пар полюсов вращающегося магнитного поля, при котором частота вращения магнитного поля изменяется скачком.
Для регулирования частоты вращения асинхронных двигателей с фазным ротором используется метод реостатного регулирования, представляющий собой плавное регулирование скольжения’ ротора путем изменения активного сопротивления его фазных обмоток.
Частотное регулирование. Наиболее перспективным методом управления частотой вращения асинхронного двигателя является регулирование частоты переменного тока статора двигателя. Угловая скорость вращающегося поля  п = 2
п = 2  f/р. Следовательно, при изменении частоты тока f пропорционально изменяется угловая скорость поля. Однако при осуществлении регулирования частоты тока нужно учесть, что необходимо одновременное регулирование напряжения. Это связано с тем, что в соответствии с выражением (14.10) ЭДС фазы, а следовательно, и питающее напряжение пропорциональны частоте тока и потоку. Так как поток должен сохраняться во всех режимах одним и тем же, то напряжение должно быть (без учета падений напряжения в машине) пропорциональным частоте. Кроме того, это нужно для того, чтобы при изменении частоты вращения двигателя не изменялся его вращающий момент.
f/р. Следовательно, при изменении частоты тока f пропорционально изменяется угловая скорость поля. Однако при осуществлении регулирования частоты тока нужно учесть, что необходимо одновременное регулирование напряжения. Это связано с тем, что в соответствии с выражением (14.10) ЭДС фазы, а следовательно, и питающее напряжение пропорциональны частоте тока и потоку. Так как поток должен сохраняться во всех режимах одним и тем же, то напряжение должно быть (без учета падений напряжения в машине) пропорциональным частоте. Кроме того, это нужно для того, чтобы при изменении частоты вращения двигателя не изменялся его вращающий момент.
Чтобы оценить характер зависимости вращающего момента от частоты тока в обмотках статора и от напряжения на нем, пренебрежем в уравнении (14.28) активным сопротивлением обмотки статора гл и индуктивными сопротивлениями рассеяния обмоток статора xpac1 и ротора xрас2 и воспользуемся выражением для частоты скольжения (14.13):
Mвр =  =
= 
 А
А  ,
,
Следовательно, при изменении частоты тока для поддержания вращающего момента постоянным необходимо пропорционально изменять напряжение на статоре; иными словами, условием поддержания постоянства вращающего момента двигателя при регулировании частоты будет U1/f = const. Если регулировать частоту тока и напряжение, соблюдая указанное условие, то механические характеристики двигателя будут оставаться жесткими, а максимальный момент почти независимым от частоты (он существенно уменьшается лишь при относительно низких частотах). В то же время мощность будет изменяться пропорционально частоте тока, так как Р2 = Мвр р. Например, при уменьшении частоты тока в 2 раза вдвое уменьшается и мощность двигателя на валу.
Регулирование изменением числа пар полюсов. Ступенчатое изменение угловой скорости асинхронного двигателя в широких пределах осуществимо ценой усложнения и удорожания конструкции асинхронного двигателя — это регулирование переключением числа пар полюсов двигателя.
При постоянной частоте сети угловая скорость вращающегося поля зависит только от числа пар полюсов этого поля, определяемого обмоткой статора. Если на статоре поместить две отдельные обмотки — одну, образующую р пар, а другую, образующую р’ пар полюсов, то, включив в сеть первую или вторую обмотку, мы получим частоту вращения поля:
соответственным образом будут различаться и частоты вращения ротора двигателя. При этом обмотка ротора двигателя должна быть выполнена, как беличье колесо.
Числа полюсов обмоток статора в этом случае взаимно ничем не связаны и могут быть выбраны любыми в зависимости от условий работы двигателя. Само регулирование сводится к скачкообразному изменению частоты вращения поля двигателя. Но частота вращения ротора не может изменяться скачкообразно из-за инерции всей системы электропривода. Лишь после переключения начинается соответствующее изменение частоты вращения ротора.

Чтобы показать нагляднее этот переходный процесс, построим две механические характеристики асинхронной машины с изменяемым числом пар полюсов: одну характеристику, соответствующую р парам полюсов, а вторую р’ = 1р парам полюсов (соответственно рис. 14.31, а и б). Предположим, что момент на валу двигателя остается постоянным при изменении частоты вращения поля. При увеличении последней, т. е. при переходе от р’ к р парами полюсов, двигатель сначала оказывается в условиях, близких к пусковым, и имеет место скачок тока.
Но при переходе от р к р’, т. е. при уменьшении частоты вращения поля, машина оказывается сначала в условиях генераторного режима и работает, отдавая энергию в сеть.
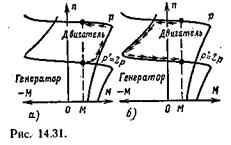 |
Такой режим иногда используется для быстрого и экономичного торможения электропривода.
Двумя отдельными обмотками снабжаются статоры лишь у двигателей небольшой мощности; у двигателей большой мощности более целесообразным является переключение катушек одной и той же обмотки для получения различного числа пар полюсов. На рис. 14.32 показана схема переключения трехфазной обмотки с двух на четыре полюса. Переключение обмотки в ином отношении, чем 1 : 2, требует более сложного изменения схемы и применяется реже.
В большинстве случаев статор асинхронной машины снабжается двумя независимыми обмотками, из которых каждая переключается в отношении 1 : 2 или ином. Таким образом, двигатель имеет четыре ступени частоты вращения, например 3000, > 1500, 1000 и 500 об/мин.
Реостатное регулирование. В трехфазных асинхронных двигателях с фазным ротором используется реостатный способ регулирования частоты вращения ротора. Это достигается введением в цепь фазных обмоток ротора регулируемого трехфазного реостата, как при пуске двигателя (рис. 14.24). Но этот реостат должен быть рассчитан на длительную нагрузку током ротора, а не на кратковременную, как пусковой реостат. Увеличение активного сопротивления цепи ротора изменяет характеристику М (s) — делает ее более мягкой (см. рис. 14.25). Если при постоянном моменте на валу двигателя увеличивать активное сопротивление цепи ротора путем постепенного увеличения сопротивления реостата (rр1 2
и механической мощности
Рмех=r’в2  (I’2 ) 2 .
(I’2 ) 2 .
показывает, что деля механической мощности уменьшается прямо пропорционально уменьшению частоты вращения ротора, в то же время соответственно увеличивается доля мощности потерь в активном сопротивлении цепи ротора. Следовательно, для уменьшения частоты вращения двигателя, например, на 25 % нужно включить в цепь ротора реостат с таким активным сопротивлением, в котором будет бесполезно превращаться в теплоту четверть энергии вращающегося магнитного поля. Недостатком такого регулирования может являться и то обстоятельство, что включение реостата в цепь ротора делает механическую характеристику двигателя мягче, следовательно, уменьшает стабильность его частоты вращения. При включенном реостате малые изменения нагрузки на валу вызывают значительные изменения частоты вращения двигателя.
Источник



