
- Способы регулирования в системах автоматики
- Автоматическое регулирование технологических процессов
- Технологические процессы и переменные процесса
- Принцип работы и элементы системы автоматического регулирования
- Виды систем автоматического регулирования
- Замкнутая система автоматического регулирования
- Разомкнутая система автоматического регулирования
- Методы автоматического регулирования
- Регулирование с обратной связью
- Регулирование с воздействием по возмущению
- Одноконтурные и многоконтурные системы регулирования
Способы регулирования в системах автоматики
В системах автоматики применяются три способа регулирования:
1) по отклонению регулируемой величины,
2) по возмущению (по нагрузке),
Способ регулирования по отклонению регулируемой величины рассмотрим на примере системы регулирования частоты вращения двигателя постоянного тока (рис. 1).
При работе двигатель Д, являясь объектом регулирования, испытывает на себе действие различных возмущений (изменения нагрузки на валу двигателя, напряжения питающей сети, частоты вращения двигателя, приводящего во вращение якорь генератора Г, изменение температуры окружающей среды, приводящее в свою очередь к изменению сопротивления обмоток, а следовательно, и токов и т. п.).
Все эти возмущения вызовут отклонение частоты вращения двигателя Д, что повлечет за собой изменение э. д. с. тахогенератора ТГ. В цепь тахогенератора ТГ включен реостат Р1. Напряжение U0, снимаемое с реостата P1 включено встречно с напряжением тахогенератора ТГ. В результате этого получается разность напряжений е = U0 — Uтг, которая через усилитель У подается на двигатель ДП, перемещающий ползунок реостата Р. Напряжение U0 соответствует заданному значению регулируемой величины — частоте вращения ωо, а напряжение тахогенератора U тг — текущему значению частоты вращения.
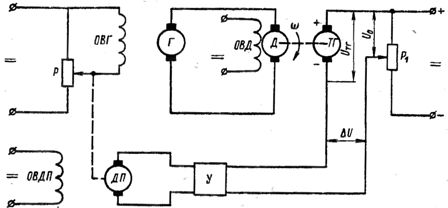
Рис. 1. Принципиальные схемы управления частотой вращения двигателя постоянного тока по замкнутому циклу: Р — реостат, ОВГ — обмотка возбуждения генератора, Г — генератор, ОВД — обмотка возбуждения двигателя, Д — двигатель, ТГ — тахогенератор, ДП — двигатель привода ползунка реостата, У — усилитель.
Если под действием возмущений разность между этими величинами (отклонение) превысит заданный предел, то на регулятор поступит задающее воздействие в виде изменения тока возбуждения генератора, которое заставит это отклонение уменьшиться. В общем случае система, работающая по способу отклонения , представлена схемой на рис. 2 , а.
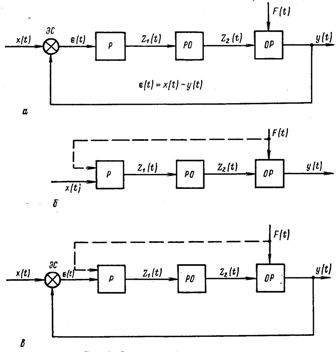
Рис. 2 . Схемы способов регулирования: а — по отклонению, б — по возмущению, в — комбинированный, Р — регулятор, РО — регулирующий орган, ОР — объект регулирования, ЭС — элемент сравнения, х (t ) — задающее воздействие, Z 1(t ) и Z 2 (t ) — внутренние регулирующие воздействия, у (t ) — регулируемая величина, F (t ) — возмущающее воздействие.
Отклонение регулируемой величины приводит в действие регулирующий орган, это действие всегда направлено так, что оно уменьшает отклонение. Для получения разности величин ε (t) = x ( t) — у (f) в систему вводится элемент сравнения ЭС.
Действие регулирующего органа при регулировании по отклонению происходит независимо от того, по какой причине произошло изменение регулируемой величины. Это, несомненно, является большим достоинством данного способа.
Способ регулирования по возмущению, или компенсация возмущения , основан на том, что в системе применяются устройства, компенсирующие влияние изменения возмущающего воздействия.
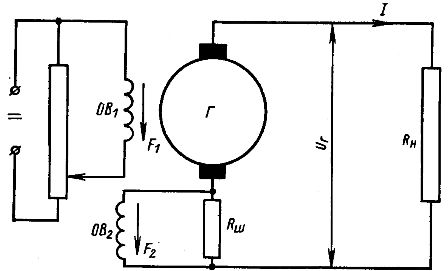
Рис. 3 . Принципиальная схема регулирования напряжения генератора постоянного тока: Г — генератор, ОВ1 и ОВ2 — обмотки возбуждения генератора, Rн — сопротивление нагрузки, F1 и F2 — магнитодвижущие силы обмоток возбуждения, Rш — сопротивление.
В качестве примера рассмотрим работу генератора постоянного тока (рис. 3 ). Генератор имеет две обмотки возбуждения: ОВ 1 включаемую параллельно якорной цепи, и ОВ 2 , включаемую на сопротивление R i . Обмотки возбуждения включены так, что их м. д. с. F 1 и F2 складываются . Напряжение на клеммах генератора будет зависеть от суммарной м. д. с. F = F1+F2.
При увеличении тока нагрузки I (сопротивление нагрузки Rн уменьшается) напряжение генератора Uг должно было бы уменьшиться за счет увеличения падения напряжения в якорной цепи генератора, но этого не произойдет потому, что м. д. с. F2 обмотки возбуждения ОВ2 возрастает, так как она пропорциональна току нагрузки I .
Это приведет к возрастанию суммарной м. д. с, а следовательно, к выравниванию напряжения генератора. Так происходит компенсация падения напряжения при изменении тока нагрузки — основного возмущения на генератор. Сопротивление R ш в данном случае является устройством, позволяющим измерять возмущение — нагрузку.
В общем случае схема системы, работающей по способу компенсации возмущения, показана на рис. 2 , б.
Возмущающие воздействия могут быть вызваны разными причинами, поэтому их может быть не одно, а несколько. Это приводит к усложнению анализа работы системы автоматического регулирования. Обычно ограничиваются рассмотрением возмущающих воздействий, вызванных основной причиной, например изменением нагрузки. В этом случае регулирование называют регулированием по нагрузке.
Комбинированный способ регулирования (см. рис. 2 , в) сочетает в себе два предыдущих способа: по отклонению и по возмущению. Он применяется при построении сложных систем автоматики, где требуется высококачественное регулирование.
Как следует из рис. 2 , при любом способе регулирования всякая система автоматического регулирования состоит из регулируемой (объект регулирования) и регулирующей (регулятор) частей. Регулятор во всех случаях должен иметь чувствительный элемент, который измеряет отклонение регулируемой величины от предписанного значения, а также регулирующий орган, который обеспечивает восстановление заданного значения регулируемой величины после ее отклонения.
Если в системе регулирующий орган получает воздействие непосредственно от чувствительного элемента и приводится им в действие, то такая система регулирования называется системой прямого регулирования, а регулятор — регулятором прямого воздействия.
В регуляторах прямого действия чувствительный элемент должен развивать достаточную мощность для изменения положения регулирующего органа. Это обстоятельство ограничивает область применения прямого регулирования, так как чувствительный элемент стремятся сделать малогабаритным, что в свою очередь создает трудность в получении усилий, достаточных для перемещения регулирующего органа.
Для повышения чувствительности измерительного элемента и получения достаточной мощности для перемещения регулирующего органа применяются усилители мощности. Регулятор, работающий с усилителем мощности, называется регулятором непрямого действия, а система в целом — системой непрямого регулирования.
В системах непрямого регулирования для перемещения регулирующего органа используют вспомогательные механизмы, действующие от постороннего источника энергии или за счет энергии регулируемого объекта. При этом чувствительный элемент воздействует только на управляющий орган вспомогательного механизма.
Классификация способов регулирования автоматики по виду регулирующих воздействий
Регулирующий сигнал вырабатывается системой регулирования на основании задающего воздействия и сигнала с чувствительного элемента, измеряющего действительное значение регулируемой величины. Полученный таким образом регулирующий сигнал поступает на регулятор, который преобразовывает его в регулирующее воздействие исполнительного механизма.
Исполнительный механизм заставляет регулирующий орган объекта принять такое положение, при котором регулируемая величина стремится к заданному значению. При работе системы происходит непрерывное измерение текущего значения регулируемой величины, поэтому регулирующий сигнал также будет вырабатываться непрерывно.
Однако регулирующее воздействие исполнительного механизма в зависимости от устройства регулятора может быть непрерывным или иметь прерывистый характер. На рис. 4, а представлена кривая отклонения Δу регулируемой величины у по времени от заданного значения у0, одновременно в нижней части рисунка показано, как должно непрерывно меняться регулирующее воздействие Z. Оно находится в линейной зависимости от регулирующего сигнала и совпадает с ним по фазе.
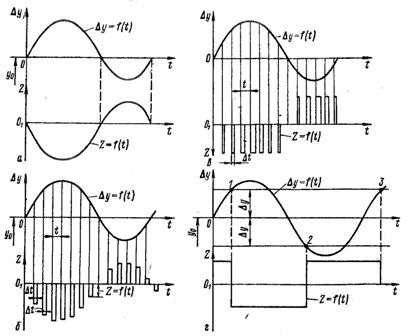
Рис. 4. Диаграммы основных видов регулирующих воздействий: а — непрерывное, б, в — прерывистое, г — релейное.
Регуляторы, вырабатывающие такое воздействие, называются регуляторами непрерывного действия , а само регулирование — непрерывным регулированием . Регуляторы, построенные по такому принципу, работают только тогда, когда существует регулирующее воздействие, т. е. пока имеется отклонение между действительным и предписанным значением регулируемой величины.
Если в процессе работы системы автоматики регулирующее воздействие при непрерывном регулирующем сигнале прерывается в некоторые промежутки времени или подается в форме отдельных импульсов, то регуляторы, работающие по такому принципу, называются регуляторами прерывистого действия (шаговыми, или импульсными) . Принципиально возможны два способа формирования прерывистого регулирующего воздействия.
На рис. 4, б и в представлены графики прерывистого регулирующего воздействия при непрерывном отклонении Δ регулируемой величины.
В первом случае регулирующее воздействие представлено отдельными импульсами одинаковой длительности Δt, следующими через равные интервалы времени t 1 = t2 = t при этом величина импульсов Z = f (t) пропорциональна значению регулирующего сигнала в момент формирования регулирующего воздействия.
Во втором случае все импульсы имеют одинаковую величину Z = f (t) и следуют через равные интервалы времени t 1 = t2 = t но имеют различную длительность Δ t . При этом длительность импульсов зависит от значения сигнала регулирования в момент формирования регулирующего воздействия. Регулирующее воздействие от регулятора передается регулирующему органу с соответствующими перерывами, поэтому регулирующий орган меняет свое положение также с перерывами.
В практике широкое применение находят также системы регулирования релейного типа . Принцип действия релейного регулирования рассмотрим на примере работы регулятора с двухпозиционным регулированием (рис. 4, г).
К регуляторам двухпозиционного регулирования относятся такие регуляторы, которые имеют только два устойчивых положения: одно — когда отклонение регулируемой величины перейдет установленный положительный предел +Δу, и другое — когда отклонение изменит знак и достигнет отрицательного предела -Δу.
Регулирующее воздействие в обеих позициях одинаково по абсолютной величине, но различно по знаку, причем это воздействие через регулятор заставляет регулирующий орган перемещаться скачкообразно таким образом, чтобы абсолютная величина отклонения всегда уменьшалась. Если величина отклонения Δу достигнет допустимого положительного значения +Δу (точка 1), сработает реле и на объект через регулятор и регулирующий орган будет действовать регулирующее воздействие -Z, которое противоположно по знаку, но равно по величине положительному значению регулирующего воздействия +Z. Отклонение регулируемой величины по истечении некоторого времени будет уменьшаться.
Достигнув точки 2, отклонение Δу станет равным допустимому отрицательному значению -Δу, реле сработает и регулирующее воздействие Z изменит свой знак на противоположный и т. д. Релейные регуляторы в сравнении с другими регуляторами просты по устройству, сравнительно недороги и находят широкое применение в тех объектах, где не требуется большая чувствительность к возмущающим воздействиям.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Автоматическое регулирование технологических процессов
Автоматическое регулирование — это управление технологическими процессами при помощи продвинутых устройств с заранее определенными алгоритмами.
В быту, например, автоматическое регулирование может осуществляться при помощи термостата, который измеряет и поддерживает комнатную температуру на заданном уровне.
 Автоматическое регулирование
Автоматическое регулирование
После того, как желательная температура задана, термостат автоматически контролирует комнатную температуру и включает или отключает нагреватель или воздушный кондиционер по мере необходимости, чтобы поддержать заданную температуру.
На производстве управление процессами обычно осуществляется средствами КИП и А, которые измеряют и поддерживают на необходимом уровне технологические параметры процесса, такие как: температура, давление, уровень и расход. Ручное регулирование на более-менее масштабном производстве затруднительно по ряду причин, а многие процессы вообще невозможно регулировать вручную.
Технологические процессы и переменные процесса
Для нормального выполнения технологических процессов необходимо контролировать физические условия их протекания. Такие физические параметры, как температура, давление, уровень и расход могут изменяться по многим причинам, и их изменения влияют на технологический процесс. Эти изменяемые физические условия называются «переменными процесса».
Некоторые из них могут понизить эффективность производства и увеличить производственные затраты. Задачей системы автоматического регулирования является минимизация производственных потерь и затрат на регулирование, связанных с произвольным изменением переменных процесса.
На любом производстве осуществляется воздействие на сырьё и другие исходные компоненты для получения целевого продукта. Эффективность и экономичность работы любого производства зависит от того, как технологические процессы и переменные процесса управляются посредством специальных систем регулирования.
На тепловой электростанции, работающей на угле, уголь размалывается и затем сжигается, чтобы произвести тепло, необходимое для преобразования воды в пар. Пар может использоваться по множеству назначений: для работы паровых турбин, тепловой обработки или сушки сырых материалов. Ряд операций, которые эти материалы и вещества проходят, называется «технологическим процессом». Слово «процесс» также часто используется по отношению к индивидуальным операциям. Например, операция по размолу угля или превращения воды в пар могла бы называться процессом.
Принцип работы и элементы системы автоматического регулирования
В случае системы автоматического регулирования наблюдение и регулирование производится автоматически при помощи заранее настроенных приборов. Аппаратура способна выполнять все действия быстрее и точнее, чем в случае ручного регулирования.
Действие системы может быть разделено на две части: система определяет изменение значения переменной процесса и затем производит корректирующее воздействие, вынуждающее переменную процесса вернуться к заданному значению.
Система автоматического регулирования содержит четыре основных элемента: первичный элемент, измерительный элемент, регулирующий элемент и конечный элемент.
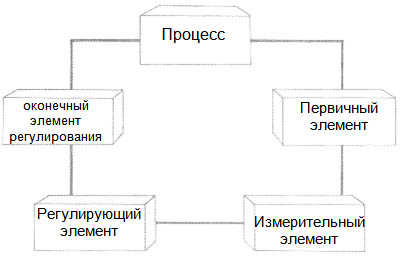 Элементы системы автоматического регулирования
Элементы системы автоматического регулирования
Первичный элемент воспринимает величину переменной процесса и превращает его в физическую величину, которое передается в измерительный элемент. Измерительный элемент преобразовывает физическое изменение, произведенное первичным элементом, в сигнал, представляющий величину переменной процесса.
Выходной сигнал от измерительного элемента посылается к регулирующему элементу. Регулирующий элемент сравнивает сигнал от измерительного элемента с опорным сигналом, который представляет собой заданное значение и вычисляет разницу между этими двумя сигналами. Затем регулирующий элемент производит корректирующий сигнал, который представляет собой разницу между действительной величиной переменной процесса и ее заданным значением.
Выходной сигнал от регулирующего элемента посылается к конечному элементу регулирования. Конечный элемент регулирования преобразовывает получаемый им сигнал в корректирующее воздействие, которое вынуждает переменную процесса возвратиться к заданному значению.
В дополнение к четырем основным элементам, системы регулирования процессами могут иметь вспомогательное оборудование, которое обеспечивает информацией о величине переменной процесса. Это оборудование может включать такие приборы как самописцы, измерители и устройства сигнализации.
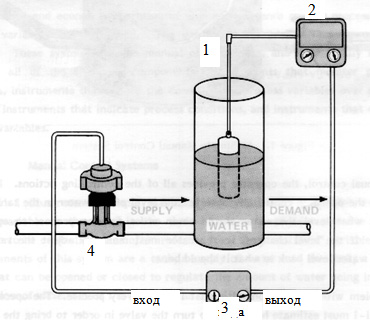 Схема простой системы автоматического регулирования
Схема простой системы автоматического регулирования
Виды систем автоматического регулирования
Имеются два основных вида автоматических систем регулирования: замкнутые и разомкнутые, которые различаются по своим характеристикам и следовательно — по уместности применения.
Замкнутая система автоматического регулирования
В замкнутой системе информация о значении регулируемой переменной процесса проходит через всю цепочку приборов и устройств, предназначенных для контроля и регулирования этой переменной. Таким образом, в замкнутой системе производится постоянное измерение регулируемой величины, её сравнение с задающей величиной и оказывается соответствующее воздействие на процесс для приведения регулируемой величины в соответствие с задающей величиной.
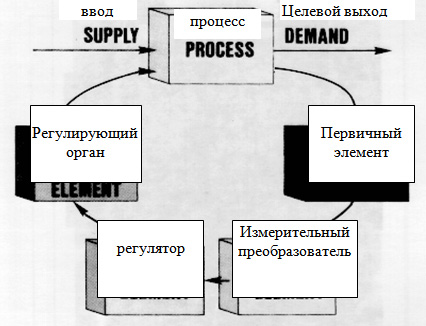 Схема замкнутой системы автоматического регулирования
Схема замкнутой системы автоматического регулирования
Например, подобная система хорошо подходит для контроля и поддержания необходимого уровня жидкости в резервуаре. Буек воспринимает изменение уровня жидкости. Измерительный преобразователь преобразует изменения уровня в сигнал, который отправляет на регулятор. Который, в свою очередь, сравнивает полученный сигнал с необходимым уровнем, заданным заранее. После регулятор вырабатывает корректирующий сигнал и отправляет его на регулирующий клапан, который корректирует поток воды.
Разомкнутая система автоматического регулирования
В разомкнутой системе нет замкнутой цепочки измерительных и обрабатывающих сигнал приборов и устройств от выхода до входа процесса, и воздействие регулятора на процесс не зависит от результирующего значения регулируемой переменной. Здесь не производится сравнение между текущим и желаемым значением переменной процесса и не вырабатывается корректирующее воздействие.
 Схема разомкнутой системы автоматического регулирования
Схема разомкнутой системы автоматического регулирования
Один из примеров разомкнутой системы регулирования — автоматическая мойка автомобилей. Это технологический процесс по мойке автомобилей и все необходимые операции чётко определены. Когда автомобиль выходит с мойки предполагается, что он должен быть чистым. Если автомобиль недостаточно чист, то система этого не обнаруживает. Здесь нет никакого элемента, который бы давал информацию об этом и корректировал процесс.
На производстве некоторые разомкнутые системы используют таймеры, чтобы гарантировать, что ряд последовательных операций выполнен. Этот вид разомкнутого регулирования может быть приемлем, если процесс не очень ответственный. Однако, если процесс требует, чтобы выполнение некоторых условий было проверено и при необходимости были бы сделаны корректировки, разомкнутая система не приемлема. В таких ситуациях необходимо применить замкнутую систему.
Методы автоматического регулирования
Системы автоматического регулирования могут создаваться на основе двух основных методов регулирования: регулирования с обратной связью, которое работает путем исправления отклонений переменной процесса после того, как они произошли; и с воздействием по возмущению, которое предотвращает возникновение отклонений переменной процесса.
Регулирование с обратной связью
Регулирование с обратной связью — это такой способ автоматического регулирования, когда измеренное значение переменной процесса сравнивается с ее уставкой срабатывания и предпринимаются действия для исправления любого отклонения переменной от заданного значения.
 Система ручного регулирования с обратной связью
Система ручного регулирования с обратной связью
Основным недостатком системы регулирования с обратной связью является то, что она не начинает регулировки процесса до тех пор, пока не произойдет отклонение регулируемой переменной процесса от значения ее уставки.
Температура должна измениться, прежде чем регулирующая система начнет открывать или закрывать управляющий клапан на линии пара. В большинстве систем регулирования такой тип регулирующего действия приемлем и заложен в конструкцию системы.
В некоторых промышленных процессах, таких как изготовление лекарственных препаратов, нельзя допустить отклонение переменной процесса от значения уставки. Любое отклонение может привести к потере продукта. В этом случае необходима система регулирования, которая бы предвосхищала изменения процесса. Такой упреждающий тип регулирования обеспечивается системой регулирования с воздействием по возмущению.
Регулирование с воздействием по возмущению
Регулирование по возмущению — это регулирование с опережением, потому что прогнозируется ожидаемое изменение в регулируемой переменной и принимаются меры прежде, чем это изменение происходит.
Это фундаментальное различие между регулированием с воздействием по возмущению и регулированием с обратной связью. Контур регулирования с воздействием по возмущению пытается нейтрализовать возмущение прежде, чем оно изменит регулируемую переменную, в то время, как контур регулирования с обратной связью пытается отрабатывать возмущение после того, как оно воздействует на регулируемую переменную.
 Система регулирования с воздействием по возмущению
Система регулирования с воздействием по возмущению
Система регулирования с воздействием по возмущению имеет очевидное преимущество перед системой регулирования с обратной связью. При регулировании по возмущению в идеальном случае величина регулируемой переменной не изменяется, она остается на значении ее уставки. Но ручное регулирование по возмущению требует более сложного понимания того влияния, которое возмущение окажет на регулируемую переменную, а также использования более сложных и точных приборов.
На заводе редко можно встретить чистую систему регулирования по возмущению. Когда используется система регулирования по возмущению, она обычно сочетается с системой регулирования с обратной связью. И даже в этом случае регулирование по возмущению предназначается только для более ответственных операций, которые требуют очень точного регулирования.
Одноконтурные и многоконтурные системы регулирования
Одноконтурная система регулирования или простой контур регулирования — это система регулирования с одним контуром, который обычно содержит только один первичный чувствительный элемент и обеспечивает обработку только одного входного сигнала на регулятор.
 Одноконтурная система регулирования
Одноконтурная система регулирования
Некоторые системы регулирования имеют два или больше первичных элемента и обрабатывают больше, чем один входной сигнал на регулятор. Эти системы автоматического регулирования называются «многоконтурными» системами регулирования.
 Многоконтурная система регулирования
Многоконтурная система регулирования
Источник



