
- Способы геодезических разбивочных работ
- Описание способов разбивочных работ
- Способ прямоугольных координат
- Способ полярных координат
- Способ прямой угловой засечки
- Способ обратной угловой засечки
- Способ линейной засечки
- Способ пересечения створов
- Способ бокового нивелирования
- Способы прямой и обратной угловых засечек
- СПОСОБЫ ПРЯМОЙ И ОБРАТНОЙ УГЛОВЫХ ЗАСЕЧЕК
Способы геодезических разбивочных работ
Описание способов разбивочных работ
Выбор способа получения на местности планового положения точек зависит от вида геодезической сети на строительной площадке, особенностей местности и возводимого сооружения и других причин. Реализация того или иного способа заключается в основном в построении на местности заданных углов и расстояний. Для контроля положения вынесенной на местности точки ее координаты определяют другим независимым способом. Полевые разбивочные и контрольные работы выполняют по разбивочным чертежам , составленным по специальным расчетам, в которых исходными служат координаты опорных и проектных точек.
Способ прямоугольных координат
Этот способ обычно применяют в случаях, когда геодезической основой является строительная сетка ( рис. 1.46 ), ее вершины А, В, С, D закреплены на местности. Для выноса точки К (точка сооружения) по линии AD откладывай ют отрезок d 1 = У К — У А и по перпендикулярному AD направлению отрезок d 2 = Х к — Х А . Для построения отрезков и d 2 теодолит устанавливают над точкой А и приводят его в рабочее положение. Перекрестие нитей зрительной трубы наводят на точку D и от точки А в створе линии AD , фиксируемой теодолитом, откладывают горизонтальное проложение d 1 и получают точку Р. Теодолит переносят и устанавливают над точкой Р , приводят его в рабочее положение, откладывают прямой угол APР ‘. По направлению РР’ от точки Р откладывают горизонтальное проложение d 2, получают точку К , закрепляют ее.
Способ полярных координат
Этот способ широко применяется при разбивке зданий , сооружений и конструкций с пунктов полигонометрических и теодолитных ходов при малом расстоянии между исходными и выносимыми пунктами. Положение точки К на местности определяют путем откладывания от твердой линии АВ угла β и по полученному направлению АК горизонтального проложения d. Угол β = α А — α AK , где α А , α АК — дирекционные углы линий АВ и АК соответственно.
Способ прямой угловой засечки
В этом способе положение проектной точки К ( рис. 1.48 ) определяют путем откладывания в опорных точках А и В от опорной линии АВ проектных углов β 1 и β 2 . Базисом b является сторона разбивочной сетки или его измеренное значение. Проектные углы β 1 и β 2 вычисляют как разность дирекционных углов сторон, которые определяют из решения обратной геодезической задачи на плоскости по проектным координатам исходных пунктов и определяемой точки.
Способ обратной угловой засечки
На местности находят приближенное положение К’ выносимой проектной точки К ( рис. 1.49 ). Над точкой К’ устанавливают теодолит и с требуемой точностью измеряют углы β 1 , β 2 как минимум на три опорные точки с известными координатами. По формулам обратной угловой засечки вычисляют координаты точки К’ и сравнивают их с проектными значениями. По разности координат определяют величины редукций Δх, Δу или угловой Ө и линейный е элементы и смещают точку в проектное положение К .
Способ линейной засечки
В этом способе положение проектной точки К на местности определяют в пересечении проектных расстояний d 1 и d 2 , его применяют в основном для разбивки осей строительных конструкций при d 1 и d 2 меньше длины мерного прибора. Одной рулеткой от А откладывают d 1 , а рулеткой от точки В отрезок d 2 . Пересечение отрезков d 1 и d 2 (при совмещении нулей рулеток с точками А и В ) дает определяемую точку К ( рис. 1.51 ).
Способ пересечения створов
В этом способе положение точки К определяют при пересечении створов Т 1 Т’ 1 и Т 2 Т’ 2 . Створы на местности задают точками их пересечения с опорными сторонами. Положение точек T 1 , Т 2 определяют горизонтальными проложениями d 1 и d 2 от опорной точки В по опорным линиям ВА и ВС, а точек Т’ 1 , Т’ 2 — d’ 1 , d’ 2 от опорной точки Е по линиям EF и ED . Способ пересечения створов ( рис. 1.52 ) обычно используют для выноса в натуру труднодоступных точек, когда использование других методов затруднено.
Способ бокового нивелирования
Этот способ часто применяют для выноса осей при детальной разбивке и для установки строительных конструкций в проектное положение ( рис. 1.53 ). Пересечение К линии АВ с конструкцией определяют следующим образом. От точек А и В по перпендикуляру к АВ откладывают отрезки l и получают точки А’, В’ и линию А’В’ , параллельную АВ . Над точкой А’ устанавливают теодолит, приводят его в рабочее положение и перекрестие нитей наводят на точку В’ . К конструкции в горизонтальном положении устанавливают рейку и перемещают ее так, чтобы отсчет по ней был равен l . Пятка рейки даст положение точки К . Подобным образом определяют и положение точки К’.
Источник
Способы прямой и обратной угловых засечек
Способ угловой засечки применяют для разбивки недоступных
точек, находящихся на значительном расстоянии от исходных
пунктов.
Различают прямую и обратную угловые засечки.
В способе прямой угловой засечки положение на местности проектной точки С (рис. 1) находят отложением на исходных пунктах А и В проектных углов  1 и 2. Базисом засечки служит или специально измеренная сторона, или сторона разбивочной сети. Проектные углы 1 и 2 вычисляют как разность дирекционных углов сторон. Дирекционные углы находят из решения обратной геодезической задачи по проектным координатам определяемой точки и известным координатам исходных пунктов.
1 и 2. Базисом засечки служит или специально измеренная сторона, или сторона разбивочной сети. Проектные углы 1 и 2 вычисляют как разность дирекционных углов сторон. Дирекционные углы находят из решения обратной геодезической задачи по проектным координатам определяемой точки и известным координатам исходных пунктов.
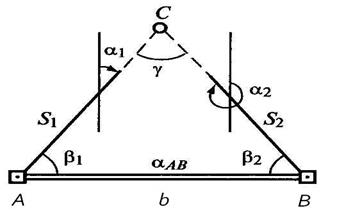
Рисунок 1 − Схема разбивки способами прямой и линейной засечек
Способ обратной угловой засечки. На местности находят приближенно
положение О’ разбиваемой точки О (рис. 2). В этой точке устанавливают теодолит и с требуемой точностью измеряют углы не менее чем на три
исходных пункта с известными координатами. По формулам обратной засечки вычисляют координаты приближенно определенной точки и сравнивают их с проектными значениями. По разности координат вычисляют величины редукции (угловой и линейный элементы) и смещают точку в проектное положение.
Для контроля на этой точке измеряют углы, вновь вычисляют ее координаты и сравнивают их с проектными. В случае недопустимых расхождений все действия повторяют.
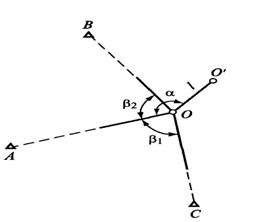
Рисунок 2 − Схема способа обратной угловой засечки
Источник
СПОСОБЫ ПРЯМОЙ И ОБРАТНОЙ УГЛОВЫХ ЗАСЕЧЕК




![]()
![]()
Способ угловой засечки применяют для разбивки недоступных точек, находящихся на значительном расстоянии от исходных пунктов. Различают прямую и обратную угловые засечки.
В способепрямой угловой засечкиположение на местности проектной точки С (рис. 14) находят отложением на исходных пунктах А т В проектных углов β1, и β2. Базисом засечки служит или специально измеренная сторона, или сторона разбивочной сети. Проектные углы β1, и β2 вычисляют как разность дирекционных углов сторон. Дирекционные углы находят из решения обратной геодезической задачи по проектным координатам определяемой точки и известным координатам исходных пунктов.
На точность разбивки способом прямой угловой засечки оказывают влияние ошибки собственно прямой засечки, исходных данных, центрирования теодолита и визирных целей, фиксации разбивочной точки, т. е.
 . (28)
. (28)
Средняя квадратическая ошибка собственно засечки равна
 (29)
(29)
 , (30)
, (30)
где mβ — средняя квадратическая ошибка отложения углов β1, и β2.
Иногда возникает необходимость определить ошибку положения точки по осям координат. В этом случае ошибку засечки вычисляют по формулам
 ; (31)
; (31)
 . (32)
. (32)
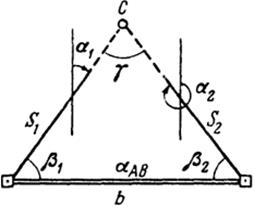
Рис. 14. Схема разбивки способами прямой угловой и линейной засечек
Для приближенных расчетов принимают S1 = S2 = S. Тогда формула (30) будет иметь вид
 . (33)
. (33)
При заданной ошибке тβ величина ошибки засечки будет зава-сеть от угла γ и расстояния S до определяемой точки. С учетом влияния угла γ и расстояния S ошибка засечки будет минимальной при γ = 109°28′.
Ошибка исходных данных является следствием ошибок в положении пунктов А и В. Если принять, что тА = тB = тАB,то
 . (34)
. (34)
Для приближенных расчетов, приняв S1 = S 2 = S и γ = 90°,можно записать
 . (35)
. (35)
По аналогии с формулами (34) и (35) совместное влияние ошибок центрирования теодолита и визирной цели выразится формулами
 ; (36)
; (36)
 , (37)
, (37)
где l — величина линейного элемента центрирования.
При разбивочных работах центрирование теодолита и визирных целей с помощью оптических отвесов, фиксация выносимой точки могут быть выполнены сравнительно точно. Поэтому основными ошибками, определяющими точность способа прямой угловой засечки, являются ошибки собственно засечки и исходных данных. Суммарная величина этих ошибок составит
 (38)
(38)
 . (39)
. (39)
При S1 = S 2 = S и γ = 90°ошибка в положении выносимой в натуру точки выразится приближенной формулой
 (40)
(40)
Часто при проектировании разбивочных работ решают вопрос о необходимой точности отложения разбивочных элементов, если задана точность определения проектного положения выносимой в натуру точки. Для прямой угловой засечки определяют ошибку отложения проектных углов.
Так, например, для b = 500 м, mC = 20 мм, mAB = 8мм, используя формулу (40), будем иметь

Отложить с такой точностью угол довольно сложно. Требуемая точность разбивки в этом случае может быть достигнута следующим образом. Отложив с возможной точностью углы β1, и β2, определяют в натуре положение точки С. Затем на опорных пунктах соответствующим числом приемов измеряют точное значение отложенных углов. Для приведенного примера при использовании теодолита 3Т2КП надо выполнить не менее четырех приемов. Измеряют также угол γ на точке С. Распределив невязку в треугольнике поровну на все три угла, определяют координаты точки С. Сравнивая их с проектными значениями, находят поправки (редукции), по которым в натуре смещают (редуцируют) приближенно вынесенную точку С. Такой способ называют способом замкнутого треугольника.
На принципе редуцирования основано и применение для разбивки способа обратной угловой засечки.На местности находят приближенно положение О’ разбиваемой проектной точки О (рис. 15). В этой точке устанавливают теодолит и с требуемой точностью измеряют углы не менее чем на три исходных пункта с известными координатами. По формулам обратной засечки вычисляют координаты приближенно определенной точки и сравнивают их с проектными значениями. По разности координат вычисляют величины Редукции (угловой и линейный элементы) и смещают точку в проектное положение. Для контроля на этой точке измеряют утлы, вновь вычисляют ее координаты и сравнивают их с проектными. В случае недопустимых расхождений все действия повторяют.

Для вычисления координат точки О’ можно использовать формулы Деламбера и Гаусса. Применительно к (рис. 9), они будут иметь вид:
 ; (41)
; (41)
 ; (42)
; (42)
 ;
;
 ; (43)
; (43)

 ;
;  .
.
На точность разбивки способом обратной угловой засечки оказывают влияние ошибки собственно засечки, исходных данных, центрирования теодолита и визирных целей, фиксации разбивочной точки и редуцирования. Очевидно, что при сравнительно больших расстояниях от определяемого до опорных пунктов влияние первых двух источников будет наиболее существенным; остальными ошибками можно пренебречь.
Ошибка собственно обратной засечки может быть подсчитана по приближенной формуле
 , (44)
, (44)
где S — расстояние от определяемого до соответствующих опорных пунктов; b — расстояние между соответствующими опорными пунктами; ωBAC — угол между исходными сторонами.
Если для приближенных расчетов принять, SA = SB = SC = Sср; bAB = bAC = bср, тоформула (33) примет вид
 . (45)
. (45)
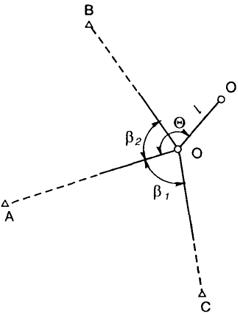
Рис. 15. Схема способа обратной угловой засечки
Ошибки исходных данных учитывают по формуле
 , (46)
, (46)
где тА = тB = тC = тАВс — ошибка в положении исходного пункта;  .
.
Для приближенных расчетов
 . (47)
. (47)
В качестве примера соответственно по формулам (45) и (46) рассчитаем точность определения положения точки О’ при Sср ≈ 1350 м, bср ≈ 2200 м, ωBAC ≈80 0 , mβ = 2″, mABC = 5мм.
Получим mсз = 11,5 мм, mи = 6,2 мм, а общая ошибка
 мм.
мм.
Источник



