
- Пуск, реверсирование и торможение двигателей постоянного тока
- Пуск и тормозные режимы двигателя постоянного тока независимого возбуждения ДПТ НВ
- Графический метод расчета пусковых реостатов
- Аналитический метод расчета пусковых реостатов
- Тормозные режимы двигателей постоянного тока независимого возбуждения дпт нв
- Генераторное рекуперативное торможение
- Динамическое торможение.
- Торможение противовключением.
Пуск, реверсирование и торможение двигателей постоянного тока
 Пуск двигателя постоянного тока прямым включением его на напряжение сети допустим только для двигателей небольшой мощности. При этом пик тока в начале пуска может быть порядка 4 — 6-кратного номинального. Прямой пуск двигателей постоянного тока значительной мощности совершенно недопустим, потому что начальный пик тока здесь будет равен 15 — 50-кратному номинальному. Поэтому пуск двигателей средних и больших мощностей производят при помощи пускового реостата, который ограничивает ток при пуске до допустимых по коммутации и механической прочности значений.
Пуск двигателя постоянного тока прямым включением его на напряжение сети допустим только для двигателей небольшой мощности. При этом пик тока в начале пуска может быть порядка 4 — 6-кратного номинального. Прямой пуск двигателей постоянного тока значительной мощности совершенно недопустим, потому что начальный пик тока здесь будет равен 15 — 50-кратному номинальному. Поэтому пуск двигателей средних и больших мощностей производят при помощи пускового реостата, который ограничивает ток при пуске до допустимых по коммутации и механической прочности значений.
Пусковой реостат выполняется из провода или ленты с высоким удельным сопротивлением, разделенных на секции. Провода присоединяются к медным кнопочным или плоским контактам в местах перехода от одной секции к другой. По контактам перемещается медная щетка поворотного рычага реостата. Реостаты могут иметь и другое выполнение. Ток возбуждения при пуске двигателя с параллельным возбуждением устанавливается соответствующим нормальной работе, цепь возбуждения включается прямо на напряжение сети, чтобы не было уменьшения напряжения, обусловленного падением напряжения в реостате (см. рис. 1).
Необходимость иметь нормальный ток возбуждения связана с тем, что при пуске двигатель должен развивать возможно больший допустимый момент Мэм, необходимый для обеспечения быстрого разгона. Пуск двигателя постоянного тока производится при последовательном уменьшении сопротивления реостата, обычно — путем перевода рычага реостата с одного неподвижного контакта реостата на другой и выключения секций; уменьшение сопротивления может производиться и путем замыкания накоротко секций контакторами, срабатывающими по заданной программе.
При пуске вручную или автоматически ток изменяется от максимального значения, равного 1,8 —2,5-кратному номинальному в начале работы при данном сопротивлении реостата, до минимального значения, равного 1,1 — 1,5-кратному номинальному в конце работы и перед переключением на другое положение пускового реостата. Ток якоря после включения двигателя при сопротивлении реостата rп составляет
где Uс — напряжение сети.
После включения начинается разгон двигателя, при этом возникает противо-ЭДС Е и уменьшается ток якоря. Если учесть, что механические характеристики n = f1(M н) и n = f2 (I я ) практически линейны, то при разгоне увеличение скорости вращения будет происходить по линейному закону в зависимости от тока якоря (рис. 1).
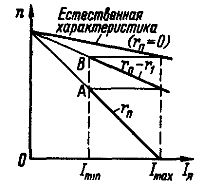
Рис. 1. Диаграмма пуска двигателя постоянного тока
Пусковая диаграмма (рис. 1) для различных сопротивлений в цепи якоря представляет собой отрезки линейных механических характеристик. При уменьшении тока якоря IЯ до значения Imin выключается секция реостата с сопротивлением r1 и ток возрастает до значения
где E1 — ЭДС в точке А характеристики; r1—сопротивление выключаемой секции.
Затем снова происходит разгон двигателя до точки В, и так далее вплоть до выхода на естественную характеристику, когда двигатель будет включен прямо на напряжение Uc. Пусковые реостаты рассчитаны по нагреву на 4 —6 пусков подряд, поэтому нужно следить, чтобы в конце пуска пусковой реостат был полностью выведен.
При остановке двигатель отключается от источника энергии, а пусковой реостат полностью включается — двигатель готов к следующему пуску. Для устранения возможности появления больших ЭДС самоиндукции при разрыве цепи возбуждения и при ее отключении цепь может замыкаться на разрядное сопротивление.
В регулируемых приводах пуск двигателей постоянного тока производится путем постепенного повышения напряжения источника питания так, чтобы ток при пуске поддерживался в требуемых пределах или сохранялся в течение большей части времени пуска примерно неизменным. Последнее можно осуществить путем автоматического управления процессом изменения напряжения источника питания в системах с обратными связями.
Пуск двигателей постоянного тока с последовательным возбуждением производится также при помощи пусковых устройств. Пусковая диаграмма представляет собой отрезки нелинейной механической характеристики для различных сопротивлений цепи якоря. Пуск при относительно небольших мощностях может выполняться вручную, а при больших — путем замыкания накоротко секций пускового реостата контакторами, которые срабатывают при управлении вручную или автоматически.
Реверсирование — изменение направления вращения двигателя — производится путем изменения направления действия вращающего момента. Для этого требуется изменить направление магнитного потока двигателя постоянного тока, т. е. переключить обмотку возбуждения или якорь, при этом в якоре будет протекать ток другого направления. При переключении и цепи возбуждения, и якоря направление вращения останется прежним.
Обмотка возбуждения двигателя параллельного возбуждения имеет значительный запас энергии: постоянная времени обмотки составляет секунды для двигателей больших мощностей. Значительно меньше постоянная времени обмотки якоря. Поэтому для того чтобы реверсирование проходило возможно быстрее, производится переключение якоря. Только там, где не требуется быстродействия, можно выполнять реверсирование путем переключения цепи возбуждения.
Реверсирование двигателей последовательного возбуждения можно производить переключением или обмотки возбуждения, или обмотки якоря, так как запасы энергии в обмотках возбуждения и якоря невелики и их постоянные времени относительно малы.
При реверсировании двигателя с параллельным возбуждением якорь сперва отключается от источника питания и двигатель механически тормозится или переключается для торможения. После окончания торможения якорь переключается, если он не был переключен в процессе торможения, и выполняется пуск при другом направлении вращения.
В такой же последовательности производится и реверсирование двигателя последовательного возбуждения: отключение — торможение — переключение — пуск в другом направлении. У двигателей со смешанным возбуждением при реверсировании следует переключить якорь либо последовательную обмотку вместе с параллельной.
Торможение необходимо для того, чтобы уменьшить время выбега двигателей, которое при отсутствии торможения может быть недопустимо велико, а также для фиксации приводимых механизмов в определенном положении. Механическое торможение двигателей постоянного тока обычно производится при наложении тормозных колодок на тормозной шкив. Недостатком механических тормозов является то, что тормозной момент и время торможения зависят от случайных факторов: попадания масла или влаги на тормозной шкив и других. Поэтому такое торможение применяется, когда не ограничены время и тормозной путь.
В ряде случаев после предварительного электрического торможения при малой скорости можно достаточно точно произвести остановку механизма (например, подъемника) в заданном положении и зафиксировать его положение в определенном месте. Такое торможение применяется и в аварийных случаях.
Электрическое торможение обеспечивает достаточно точное получение требуемого тормозящего момента, но не может обеспечить фиксацию механизма в заданном месте. Поэтому электрическое торможение при необходимости дополняется механическим, которое входит в действие после окончания электрического.
Электрическое торможение происходит, когда ток протекает согласно с ЭДС двигателя. Возможны три способа торможения.
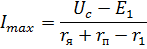
Торможение двигателей постоянного тока с возвратом энергии в сеть. При этом ЭДС Е должна быть больше напряжения источника питания UС и ток будет протекать в направлении ЭДС, являясь током генераторного режима. Запасенная кинетическая энергия будет преобразовываться в электрическую и частично возвращаться в сеть. Схема включения показана на рис. 2, а.
Рис. 2. Схемы электрического торможения двигателей постоянного тока: я — с возвратом энергии в сеть; б — при противовключении; в — динамическое торможение
Торможение двигателя постоянного тока может быть выполнено, когда уменьшается напряжение источника питания так, что Uc
Торможение при противовключении выполняется путем переключения вращающегося двигателя на обратное направление вращения. При этом ЭДС Е и напряжение Uc в якоре складываются, и для ограничения тока I следует включать резистор с начальным сопротивлением

где Imах — наибольший допустимый ток.
Торможение связано с большими потерями энергии.
Динамическое торможение двигателей постоянного тока выполняется при включении на зажимы вращающегося возбужденного двигателя резистора rт (рис. 2, в). Запасенная кинетическая энергия преобразуется в электрическую и рассеивается в цепи якоря как тепловая. Это наиболее распространенный способ торможения.

Схемы включения двигателя постоянного тока параллельного (независимого) возбуждения: а — схема включения двигателя, б — схема включения при динамическом торможении, в — схема для противовключения.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Пуск и тормозные режимы двигателя постоянного тока независимого возбуждения ДПТ НВ

Ответственным моментом при эксплуатации двигателей постоянного тока является их пуск. При включении двигателя в сеть в начальный момент ток в цепи якоря ограничивается лишь электрическим сопротивлением цепи якоря, так как в неподвижном якоре ЭДС не индуцируется. Поэтому начальный пусковой ток при непосредственном включении двигателя в сеть может достигать опасных значений, способных нарушить работу щеточно- коллекторного узла и вызвать «круговой огонь» на коллекторе. Кроме того, такой ток создаст чрезмерно большой пусковой момент, оказывающий на вращающиеся части электропривода ударное воздействие, способное вызвать их механическое разрушение. Эффективным средством ограничения пускового тока в двигателях постоянного тока является применение пусковых реостатов. Существует два метода расчета пусковых реостатов: графический и аналитический.
Графический метод расчета пусковых реостатов
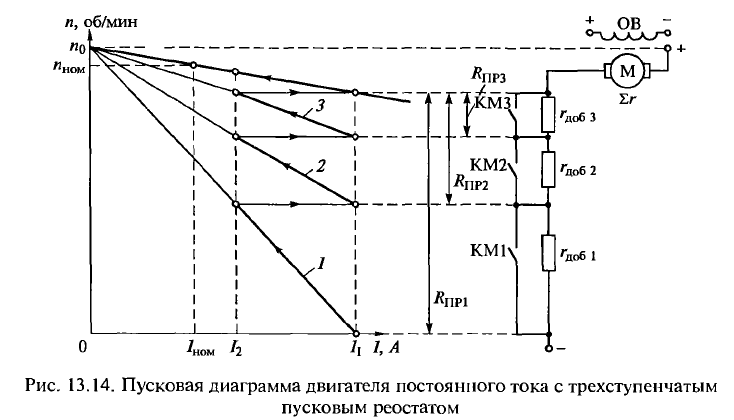
В основе графического метода лежит пусковая диаграмма двигателя. Пусковая диаграмма, представленная на рис. 13.14, совмещена с трехступенчатым пусковым реостатом; K1, К2 и КЗ являются контактами силовых контакторов, посредством которых осуществляется переключение ступеней реостата, а rдоб1, rдоб2 и rдоб3 — резисторы ступеней пускового реостата. Механические характеристики 1, 2, 3 соответствуют ступеням пускового реостата RПР1, RПР2 и RПР3. Значения начального пускового тока I1 и тока переключений реостатов I2 обычно принимают
при этом ток переключений I2 должен быть не меньше тока нагрузки, соответствующего статическому моменту сопротивления нагрузки МС, на вал двигателя. Для двигателей специального назначения, с тяжелыми условиями работы, например двигателей краново-металлургических серий, указанные значения токов могут быть увеличены.
Аналитический метод расчета пусковых реостатов
При аналитическом методе расчет сопротивлений резисторов пускового реостата ведут по формулам:
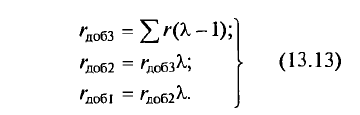
В этих выражениях λ = I1/I2 представляет собой отношение начального пускового тока I1 к току переключений I2. При работе двигателя от регулируемого преобразователя напряжения необходимость в пусковом реостате отпадает, так как пуск двигателя можно начинать с любого пониженного значения напряжения на обмотке якоря в соответствии с допустимым значением начального пускового тока.
Тормозные режимы двигателей постоянного тока независимого возбуждения дпт нв
Помимо основного (двигательного) режима работы в двигателях постоянного тока независимого (параллельного) возбуждения возможны тормозные режимы.
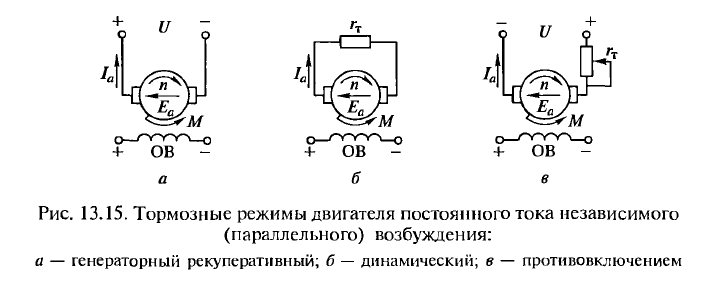
Генераторное рекуперативное торможение
Этот режим наступает, когда частота вращения якоря превышает частоту вращения холостого хода n0.
В этих условиях ЭДС машины Еа = сеФn0 превышает напряжение питающей сети (Еа > Uном), при этом ток якоря, а следовательно, и электромагнитный момент меняют свое направление на противоположное. В итоге машина постоянного тока переходит в генераторный режим и вырабатываемую при этом электроэнергию отдает в сеть. Электромагнитный момент двигателя становится тормозящим и противодействует внешнему вращающему моменту, создаваемому силами инерции вращающего с прежней скоростью якоря (рис. 13.15, а). Этот процесс торможения будет продолжаться до тех пор, пока частота вращения якоря, уменьшаясь, не достигнет значения n0.
Таким образом, для перехода двигателя в режим генераторного рекуперативного торможения не требуется изменений в схеме включения двигателя.
Генераторное рекуперативное торможение — наиболее экономичный вид торможения, так как он сопровождается возвратом энергии в сеть. Применение этого способа торможения является эффективным энергосберегающим средством в электроприводе Он целесообразен в электротранспортных средствах, работа которых связана с частыми остановками и движением под уклон. В этом случае кинетическая энергия движения транспортного средства (трамвай, троллейбус, электропоезд) преобразуется в электрическую энергию и возвращается в сеть.
Возможен способ перевода двигателя в режим генераторного рекуперативного торможения и при установившейся частоте вращения якоря. Для этого необходимо увеличить в двигателе магнитный поток возбуждения, т.е. ток в обмотке возбуждения.
Из выражения ЭДС якоря Еа = сеФn следует, что с ростом магнитного потока возбуждения Ф при неизменной частоте вращения n ЭДС якоря Еа увеличивается, что ведет к уменьшению тока в цепи якоря:

При ЭДС Еа = U ток якоря Ia = 0, а частота вращения якоря достигает значения n = n0. При дальнейшем увеличении потока возбуждения Ф, а следовательно, возрастании ЭДС якоря Еа пограничная частота вращения снижается (см. 13.12, б), а частота вращения якоря, оставаясь практически неизменной за счет сил инерции вращающихся частей электропривода, начинает превышать пограничную частоту n0. При этом ЭДС якоря превышает напряжение сети и двигатель переходит в режим генераторного рекуперативного торможения.
Динамическое торможение.
Необходимость в таком торможении возникает в том случае, когда после отключения двигателя от сети его якорь под действием кинетической энергии движущихся масс электропривода продолжает вращаться. Если при этом обмотку якоря, отключив от сети, замкнуть на резистор rт, то двигатель перейдет в генераторный режим (обмотка возбуждения должна оставаться включенной в сеть). Вырабатываемая при этом электроэнергия не возвращается в сеть, как это происходит при рекуперативном торможении, а преобразуется в теплоту, которая выделяется в сопротивлении
В режиме динамического торможения ЭДС якоря не меняет своего направления, но поскольку якорь отключен от сети (U = 0), то ток якоря изменит направление, так как будет создаваться ЭДС Еа
т.е. станет отрицательным. В результате электромагнитный момент также
изменит направление и станет тормозящим (рис. 13.15, б). Процесс торможения продолжается до полной остановки якоря (n = 0).
Торможение противовключением.
Допустим, что двигатель работает в основном (двигательном) режиме с номинальной нагрузкой. При отключении двигатели от сети вращающий
момент М = 0, но якорь двигателя за счет кинетической энергии вращающихся масс электропривода некоторое время будет продолжать вращение, т.е. произойдет выбег двигателя.
Чтобы уменьшить время выбега двигателя, применяют торможение противовключением. С этой целью изменяют полярность напряжения на клеммах обмотки якоря (полярность клемм обмотки возбуждения должна остаться прежней) и напряжение питания обмотки якоря становится отрицательным (- U). Но якорь двигателя под действием кинетической энергии вращающихся масс электропривода сохраняет прежнее (положительное) направление вращения, и так как направление магнитного потока не изменилось, то ЭДС якоря Еа также не меняет своего направления и действует согласно напряжению (-U), при этом ток якоря создается суммой напряжения сети U и ЭДС якоря Еа
(рис. 13.15, в):

где rт, — сопротивление резистора в цепи якоря двигателя.
В этих условиях электромагнитный момент станет отрицательным.
Под действием тормозящего момента — Mт, частота вращения якоря уменьшается, достигнув нулевого значения.Если в этот момент цепь якоря не отключить от сети, то произойдет реверсирование двигателя и его якорь под действием момента, который прежде был тормозным, начнет вращение в противоположную сторону. При этом двигатель перейдет в двигательный (основной) режим с отрицательными значениями частоты вращения и вращающего момента. Во избежание нежелательного реверсирования операцию торможения противовключением автоматизируют, чтобы при нулевом значении частоты вращения цепь якоря отключалась от сети.
Источник



