
Способы программного управления устройствами
Коды операции команд программы, воспринимаемые управляющей частью микропроцессора, расшифрованные и преобразованные в ней, дают информацию о том, какие операции надо выполнить, где в памяти расположены данные, куда надо направить результат и где расположена следующая за выполняемой команда.
Управляющее устройство имеет достаточно средств для того, чтобы после восприятия и интерпретации информации, получаемой в команде, обеспечить переключение (срабатывание) всех требуемых функциональных частей машины, а также для того, чтобы подвести к ним данные и воспринять полученные результаты. Именно срабатывание, т. е. изменение состояния двоичных логических элементов на противоположное, позволяет посредством коммутации вентилей выполнять элементарные логические и арифметические действия, а также передавать требуемые операнды в функциональные части микроЭВМ.
Устройство управления в строгой последовательности в рамках тактовых и цикловых временных интервалов работы микропроцессора (такт — минимальный рабочий интервал, в течение которого совершается одно элементарное действие; цикл — интервал времени, в течение которого выполняется одна машинная операция) осуществляет: выборку команды; интерпретацию ее с целью анализа формата, служебных признаков и вычисления адреса операнда (операндов); установление номенклатуры и временной последовательности всех функциональных управляющих сигналов; генерацию управляющих импульсов и передачу их на управляющие шины функциональных частей микроЭВМ и вентили между ними; анализ результата операции и изменение своего состояния так, чтобы определить месторасположение (адрес) следующей команды.
Особенности программного и микропрограммного управления
В микропроцессорах используют два метода выработки совокупности функциональных управляющих сигналов: программный и микропрограммный.
Выполнение операций в машине сводится к элементарным преобразованиям информации (передача информации между узлами в блоках, сдвиг информации в узлах, логические поразрядные операции, проверка условий и т.д.) в логических элементах, узлах и блоках под воздействием функциональных управляющих сигналов блоков (устройств) управления. Элементарные преобразования, неразложимые на более простые, выполняются в течение одного такта сигналов синхронизации и называются микрооперациями.
В аппаратных (схемных) устройствах управления каждой операции соответствует свой набор логических схем, вырабатывающих определенные функциональные сигналы для выполнения микроопераций в определенные моменты времени. При этом способе построения устройства управления реализация микроопераций достигается за счет однажды соединенных между собой логических схем, поэтому ЭВМ с аппаратным устройством управления называют ЭВМ с жесткой логикой управления. Это понятие относится к фиксации системы команд в структуре связей ЭВМ и означает практическую невозможность каких-либо изменений в системе команд ЭВМ после ее изготовления.
При микропрограммной реализации устройства управления в состав последнего вводится ЗУ, каждый разряд выходного кода которого определяет появление определенного функционального сигнала управления. Поэтому каждой микрооперации ставится в соответствие свой информационный код — микрокоманда. Набор микрокоманд и последовательность их реализации обеспечивают выполнение любой сложной операции. Набор микроопераций называют микропрограммами. Способ управления операциями путем последовательного считывания и интерпретации микрокоманд из ЗУ (наиболее часто в виде микропрограммного ЗУ используют быстродействующие программируемые логические матрицы), а также использования кодов микрокоманд для генерации функциональных управляющих сигналов называют микропрограммным, а микроЭВМ с таким способом управления — микропрограммными или с хранимой (гибкой) логикой управления.
К микропрограммам предъявляют требования функциональной полноты и минимальности. Первое требование необходимо для обеспечения возможности разработки микропрограмм любых машинных операций, а второе связано с желанием уменьшить объем используемого оборудования. Учет фактора быстродействия ведет к расширению микропрограмм, поскольку усложнение последних позволяет сократить время выполнения команд программы.
Преобразование информации выполняется в универсальном арифметико-логическом блоке микропроцессора. Он обычно строится на основе комбинационных логических схем.
Для ускорения выполнения определенных операций вводятся дополнительно специальные операционные узлы (например, циклические сдвигатели). Кроме того, в состав микропроцессорного комплекта (МПК) БИС вводятся специализированные оперативные блоки арифметических расширителей.
Операционные возможности микропроцессора можно расширить за счет увеличения числа регистров. Если в регистровом буфере закрепление функций регистров отсутствует, то их можно использовать как для хранения данных, так и для хранения адресов. Подобные регистры микропроцессора называются регистрами общего назначения (РОН). По мере развития технологии реально осуществлено изготовление в микропроцессоре 16, 32 и более регистров.
В целом же, принцип микропрограммного управления (ПМУ) включает следующие позиции:
1) любая операция, реализуемая устройством, является последовательностью элементарных действий — микроопераций;
2) для управления порядком следования микроопераций используются логические условия;
3) процесс выполнения операций в устройстве описывается в форме алгоритма, представляемого в терминах микроопераций и логических условий, называемого микропрограммой;
4) микропрограмма используется как форма представления функции устройства, на основе которой определяются структура и порядок функционирования устройства во времени.
ПМУ обеспечивает гибкость микропроцессорной системы и позволяет осуществлять проблемную ориентацию микро- и миниЭВМ.
Источник
ПРОГРА́ММНОЕ УПРАВЛЕ́НИЕ
В книжной версии
Том 27. Москва, 2015, стр. 552-553
Скопировать библиографическую ссылку:





ПРОГРА́ММНОЕ УПРАВЛЕ́НИЕ, управление работой системы (объекта, устройства, машины) по заданной программе. Осуществляется системой автоматического управления , которая вырабатывает сигналы (управляющие воздействия), воздействующие на исполнит. органы управляемого объекта. На объект управления, кроме управляющего воздействия, действует также возмущающее воздействие (внешняя среда). П. у. может осуществляться как с использованием обратной связи (системы с замкнутой цепью воздействия), так и без неё (системы с разомкнутой цепью воздействия). П. у. наиболее эффективно для управления сложными многокоординатными процессами (напр., П. у. ЛА, технологич. процессом). Системы П. у. с замкнутой цепью воздействия могут функционировать с оптимизацией и без оптимизации режима работы управляемого объекта. Процесс П. у. с оптимизацией можно рассматривать как минимизацию некоторого функционала, характеризующего «расстояние» между искомым и действительным (фактическим) состояниями объекта. Термин «П. у. с оптимизацией» возник в теории управления системами, подверженными действию случайных возмущений (стохастическими). Системы, работающие по разомкнутому циклу, используют только в качестве составной части более сложных систем автоматич. управления (регулирования).
Источник
Управление устройствами
Подсистема ввода-вывода
В компьютерных системах кроме процессора и оперативной памяти присутствует множество разнообразных устройств ( device ) – жесткие диски, приводы оптических дисков (CD, DVD , Blu-Ray Disk ), устройства флеш-памяти, принтеры, сканеры, звуковые и видеокарты, модемы, сетевые карты и т. п.
Операционная система должна обеспечивать управление всеми этими устройствами, т. е. предоставлять способы обмена информацией между приложениями и устройствами.
Управление устройствами в Windows осуществляется подсистемой ввода вывода, включающей несколько компонентов (см. рис.4.1 в лекции 4 » Архитектура Windows «):
- диспетчер ввода-вывода (I/O manager – Input/Output manager) – основной компонент; обеспечивает интерфейс между приложениями и устройствами;
- диспетчер PnP (Plug and Play manager) – компонент, реализующий принцип Plug and Play («подключи и работай») – автоматическое распознавание и конфигурацию подключаемых к системе устройств;
- диспетчер электропитания (power manager) – обеспечивает поддержку различных режимов энергопотребления системы и устройств;
- драйверы устройств – программы, реализующие операции ввода-вывода для конкретного устройства; драйверы больше других компонентов системы «знают» о специфике своего устройства;
- HAL (Hardware Abstraction Layer) – уровень абстрагирования от аппаратных средств; скрывает от других компонентов особенности реализации конкретных процессоров, системных плат и контроллеров прерываний;
- реестр (registry) – используется как база данных для параметров устройств и драйверов.
Далее будут рассмотрены общая схема ввода-вывода, функции и структуры данных диспетчера ввода-вывода, представленные в WRK, а также пример выполнения операции чтения.
Принцип управления устройствами
Рассмотрим схематично принцип управления внешними устройствами, а затем перейдем к изучению соответствующих структур и функций WRK.
Для пользовательских приложений операционная система представляет устройства в виде файлов. Такое представление позволяет единообразно работать с разными устройствами, используя одинаковые функции, не задумываясь о деталях реализации доступа к устройствам.
Файл (file) – совокупность данных, имеющих имя и допускающих операции чтения-записи. Типичная последовательность работы с файлом: открытие файла , выполнение команд чтения-записи, закрытие файла .
При открытии файла создается файловый объект типа FILE_OBJECT , который связан с объектом, представляющим конкретное устройство ( DEVICE_OBJECT ). В объекте-устройстве содержится информация о драйвере, который управляет этим устройством. Драйвер в системе описывается объектом типа DRIVER_OBJECT . Объекты DRIVER_OBJECT создаются при загрузке в систему нового драйвера. Затем объект DRIVER_OBJECT может создать несколько объектов DEVICE_OBJECT – по количеству управляемых драйвером устройств (рис.15.1).
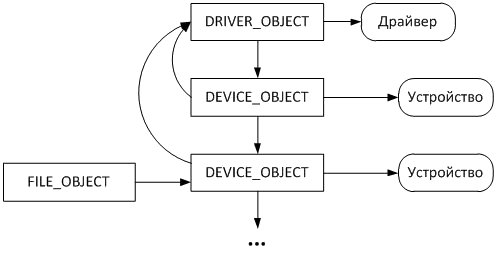
Как видно из рис.15.1, в объекте DRIVER_OBJECT содержится указатель на список объектов-устройств, а в каждом из этих объектов хранится ссылка на управляющий драйвер . Таким образом, имея информацию об объекте DRIVER_OBJECT , можно найти все устройства, которыми он управляет и, наоборот, по объекту DEVICE_OBJECT легко определяется драйвер устройства.
Приложение , которому необходимо произвести некоторую операцию с устройством (файлом), вызывает соответствующую WinAPI функцию (CreateFile, ReadFile, WriteFile и др.), которая, в свою очередь , обращается к функции диспетчера ввода-вывода.
Операция, которая запрашивается приложением, представляется в системе объектом типа IRP ( I/O Request Packet – пакет запроса на ввод/вывод ). В этом объекте хранится информация о типе операции ввода/вывода (создание, чтение, запись и т. п.), а также необходимые параметры для данной операции . Пакет IRP передается диспетчером ввода-вывода в очередь IRP потока, который запросил операцию ввода-вывода, после чего вызывается соответствующий драйвер , непосредственно выполняющий запрошенную операцию.
Структуры данных для ввода-вывода
Драйвер в системе описывается объектом типа DRIVER_OBJECT ( файл base\ntos\inc\io.h, строка 1603), имеющим следующие основные поля:
- Type – поле, определяющее тип структуры подсистемы ввода-вывода. Значения этого поля могут быть следующими – IO_TYPE_DRIVER, IO_TYPE_FILE, IO_TYPE_DEVICE, IO_TYPE_IRP и др. (см. файл base\ntos\inc\io.h, строка 25);
- Size – размер объекта в байтах;
- DeviceObject – ссылка на первый объект DEVICE_OBJECT в списке устройств, управляемых данным драйвером (см. рис.15.1). Следующие устройства в списке можно определять по полю NextDevice объекта DEVICE_OBJECT ;
- Flags – флаги, определяющие тип драйвера (см. файл base\ntos\inc\io.h, строка 1530);
- DriverName – имя драйвера в системе;
- HardwareDatabase – путь в реестре к информации о драйвере;
- DriverStart , DriverSize , DriverSection – информация о расположении драйвера в памяти;
- DriverInit – адрес процедуры DriverEntry (точка входа в драйвер), отвечающей за инициализацию драйвера;
- DriverUnload – адрес процедуры выгрузки драйвера;
- MajorFunction – массив адресов процедур, каждая из которых отвечает за определенную операцию с устройством. Максимальное количество таких процедур равно константе IRP_MJ_MAXIMUM_FUNCTION+ 1 = 2 8 (файл base\ntos\inc\io.h, строка 80), которая определяет также количество кодов IRP (см. далее).
Устройства представлены объектами типа DEVICE_OBJECT , который включает следующие главные поля ( файл base\ntos\inc\io.h, строка 1397):
- Type , Size – совпадают по назначению с полями типа DRIVER_OBJECT ;
- ReferenceCount – счетчик количества открытых дескрипторов для устройства. Позволяет отслеживать, используется кем-либо устройство или нет;
- DriverObject – ссылка на драйвер, который управляет устройством;
- NextDevice – указатель на следующее устройство в списке устройств для данного драйвера;
- Flags , Characteristics – поля, уточняющие характеристики устройства;
- DeviceType – тип устройства; возможные типы перечислены в файле public\sdk\inc\devioctl.h (строка 26);
- SecurityDescriptor – дескриптор безопасности, сопоставленный с устройством (см. лекцию 9 «Безопасность в Windows»).
Пакеты запроса на ввод- вывод описываются типом IRP ( I/O Request Packet ), состоящим из двух частей – заголовка фиксированной длины (тело IRP ) и одного или нескольких блоков стека. В заголовке описывается информация , общая для запроса. Каждый блок стека содержит данные об одной операции ввода-вывода.
Заголовок включает следующие основные поля:
- Type , Size – поля, по назначению аналогичные соответствующим полям типов DRIVER_OBJECT и DEVICE_OBJECT ;
- IoStatus – статус операции при завершении;
- RequestorMode – режим, в котором работает поток, инициировавший операцию ввода-вывода, – пользовательский или режим ядра;
- StackCount – количество блоков стека;
- Tail.Overlay.Thread – указатель на структуру ETHREAD потока, запросившего операцию ввода-вывода;
- Tail.Overlay.CurrentStackLocation – указатель на блок стека (IRP Stack Location), который описывается структурой IO_STACK_LOCATION .
Структура блока стека IO_STACK_LOCATION описана в файле base\ntos\inc\io.h, строка 2303) и имеет следующие главные поля:
- MajorFunction – номер основной функции, определяющий запрошенную операцию ввода-вывода и совпадающий с номером функции драйвера в массиве MajorFunction (структура DRIVER_OBJECT, см. выше), которую нужно вызвать для выполнения запрошенной операции. Как уже отмечалось, всего кодов 28 (IRP_MJ_MAXIMUM_FUNCTION + 1) , они описаны в файле base\ntos\inc\io.h (строки 51–79);
- DeviceObject – указатель на структуру DEVICE_OBJECT , определяющую устройство для данной операции ввода-вывода;
- FileObject – указатель на структуру FILE_OBJECT (файл base\ntos\inc\io.h, строка 1763), которая ассоциирована со структурой DEVICE_OBJECT .
В следующем параграфе разобран пример операции чтения с использованием рассмотренных выше структур данных.
Пример ввода-вывода
Для ввода-вывода используются следующие основные функции:
- создание/открытие файла – IoCreateFile (файл base\ntos\io\iomgr\iosubs.c, строка 4795);
- чтение из файла – NtReadFile (файл base\ntos\io\iomgr\read.c, строка 90);
- запись в файл – NtWriteFile (файл base\ntos\io\iomgr\write.c, строка 87);
- закрытие файла – IopDeleteFile файл base\ntos\io\iomgr\objsup.c, строка 465).
Рассмотрим пример чтения с устройства, используя изученные структуры данных и функцию NtReadFile (рис.15.2).
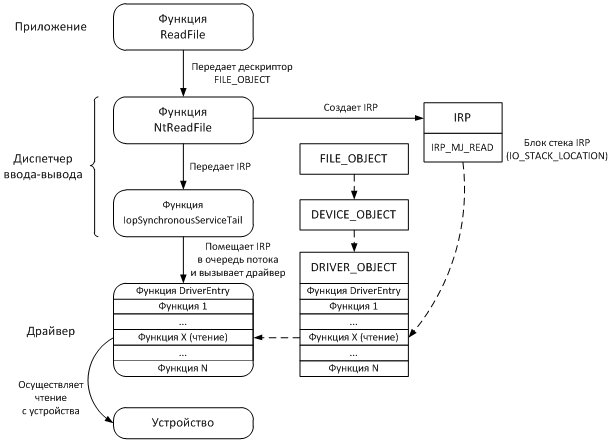
Предположим, некоторому приложению требуется прочитать данные с устройства, например, из файла на жестком диске. Предварительно приложение должно получить дескриптор объекта FILE_OBJECT , например, при помощи WinAPI функции CreateFile .
Для чтения из файла приложение вызывает WinAPI-функцию ReadFile , которая обращается к функции диспетчера ввода-вывода NtReadFile и передает ей дескриптор объекта FILE_OBJECT .
Функция NtReadFile определена в файле base\ntos\io\iomgr\read.c (строка 90) и выполняет две основные задачи – создает объект IRP (строка 517) и вызывает функцию IopSynchronousServiceTail (строка 725). При создании объекта IRP в блок стека заносится номер основной функции (Major Function ), в случае операции чтения этот код равен константе IRP_MJ_READ (строка 558) и указывает на функцию чтения в массиве MajorFunction структуры DRIVER_OBJECT .
Функция IopSynchronousServiceTail определена в файле base\ntos\io\iomgr\internal.c (строка 7458). Эта функция помещает переданный ей объект IRP в очередь потока ( функция IopQueueThreadIrp , строка 7468). Указатель на очередь IRP потока хранится в поле IrpList структуры ETHREAD ( файл base\ntos\inc\ps.h, строка 623). Кроме этого, функция IopQueueThreadIrp вызывает соответствующий драйвер ( функция IoCallDriver, строка 7494).
Драйвер выполняет определенную кодом IRP функцию и возвращает статус операции .
Резюме
В лекции представлены компоненты подсистемы ввода вывода в Windows , рассмотрен принцип управления устройствами, а также реализация этого принципа на основе структур данных и функций Windows Research Kernel . Разобран пример ввода вывода для операции чтения из файла.
В следующей лекции подробно рассматривается структура основной файловой системы Windows – NTFS .
Источник



