
Преобразование эпюра.
Проекции прямых, плоскостей, фигур на эпюрах в общем случае дают искаженное представление о форме и размерах проецируемого объекта, что делает сложным решение позиционных и метрических задач. Упростить решение возможно путем преобразования исходного эпюра. Как правило, преобразование состоит в том, чтобы проецируемый объект или его исследуемый элемент занял положение параллельное или перпендикулярное одной из плоскостей проекций. Тогда на этой плоскости проекций элемент изобразится без искажений формы и размеров.
Из методов преобразования чертежей известны следующие: 1. Перемещение проецируемого тела в пространстве до требуемого положения. Перемещение обычно осуществляется вращением тела.
2. Введение дополнительных плоскостей проекций, таких чтобы проектируемый объект оказался в частном положении в новой системе плоскостей (способ перемены плоскостей проекций).
3. Изменением способа проецирования. Например, параллельное ортогональное проецирование заменяется косоугольным.
Метод вращения.
В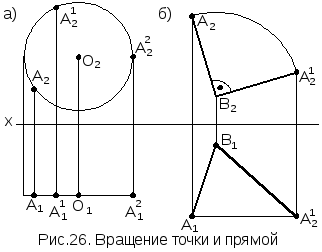 ращение обычно осуществляется вокруг какой-либо проецирующей прямой. Тогда при вращении точки вокруг проецирующей прямой на одной плоскости проекций описывается окружность, в центре которой находится проецирующая прямая, а на другой плоскости образуется отрезок прямой, параллельной оси проекций и равный диаметру окружности (рис.26,а – точкаАвращается вокруг фронтально проецирующей прямойОП2). При вращении прямой достаточно осуществить вращение двух ее точек, в некоторых случаях достаточно и одной.
ращение обычно осуществляется вокруг какой-либо проецирующей прямой. Тогда при вращении точки вокруг проецирующей прямой на одной плоскости проекций описывается окружность, в центре которой находится проецирующая прямая, а на другой плоскости образуется отрезок прямой, параллельной оси проекций и равный диаметру окружности (рис.26,а – точкаАвращается вокруг фронтально проецирующей прямойОП2). При вращении прямой достаточно осуществить вращение двух ее точек, в некоторых случаях достаточно и одной.
Задача. Дано (рис.26,б): прямая АВ. Необходимо повернуть ее в вертикальной плоскости на 90°.
Решение. 1. Вращение целесообразно осуществлять вокруг фронтально проецирующей прямой, проходящей через какую либо точку данной прямой (в примере – точка В). Тогда на фронтальной проекции вращают точкуАпо дуге окружности с центром в точкеВрадиусомАВна 90°. Получают фронтальную проекцию нового положения точкиА— точку .
.
2. Строят ее горизонтальную проекцию  из того условия, что на плоскостиП1точкаА1будет перемещаться по прямой параллельной осих. Проекции
из того условия, что на плоскостиП1точкаА1будет перемещаться по прямой параллельной осих. Проекции и
и определят новое положение прямойАВ.
определят новое положение прямойАВ.
Н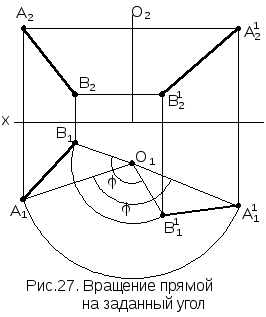 а рис.27 показано вращение прямойАВвокруг оси вращения проходящей через точкуОП1. ПрямаяАВповернута на уголφ. Алгоритм построения следующий. 1. Вращают точкиА1иВ1вокруг центраО1на уголφ. Получают горизонтальную проекциюА1В1 нового положения прямойАВ, причем
а рис.27 показано вращение прямойАВвокруг оси вращения проходящей через точкуОП1. ПрямаяАВповернута на уголφ. Алгоритм построения следующий. 1. Вращают точкиА1иВ1вокруг центраО1на уголφ. Получают горизонтальную проекциюА1В1 нового положения прямойАВ, причем .
.
2. Строят фронтальную проекцию А2В2нового положения прямой.
Из данного построения можно вывести следующие закономерности: 1. Если вращать отрезок прямой или фигуру вокруг оси перпендикулярной к плоскости проекций, то проекция фигуры на эту плоскость не меняется, изменяется лишь ее положение относительно оси проекций.
2. Точки фигуры на другой плоскости проекций (параллельной оси вращения) перемещаются по прямым, параллельным оси проекций. При этом проекция изменяется по форме и величине.
Основываясь на этих закономерностях можно производить построения не строя на эпюре оси вращения и не показывая самого вращения. Такой вариант способа вращения иногда называют способом плоскопараллельного перемещения.
Задача. Дано (рис.28): наклонная прямая АВ. Необходимо: 1. Определить ее истинную длину. 2. Привести в положение перпендикулярное плоскостиП1.
Решение. Чтобы определить истинную длину наклонной прямой, ее необходимо привести в положение параллельное какой либо плоскости проекций. Выполним это способом вращения (в вариации плоскопараллельного перемещения)1. Выполняют поворот прямой АВвокруг оси перпендикулярнойП1до положения параллельностиП2. При таком повороте величина отрезкаА1В1не изменится, а сам он займет положение параллельное осих. Поэтому саму ось в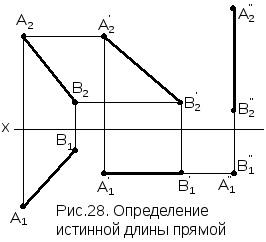 ращения не показывают, а в произвольном месте на плоскостиП1изображают отрезок
ращения не показывают, а в произвольном месте на плоскостиП1изображают отрезок и параллельный осих. Строят фронтальную проекцию
и параллельный осих. Строят фронтальную проекцию развернутого положении прямойАВ. ПрямаяАВв новом положении параллельна плоскости проекцийП2, поэтому отрезок
развернутого положении прямойАВ. ПрямаяАВв новом положении параллельна плоскости проекцийП2, поэтому отрезок изображает ее в истинной длине.
изображает ее в истинной длине.
2. Вращают фронтальную проекцию  вокруг оси перпендикулярной плоскости проекцийП2, при этом величина отрезка
вокруг оси перпендикулярной плоскости проекцийП2, при этом величина отрезка не изменится, но он займет нужное нам положение перпендикулярности к плоскостиП1. Ось вращения не показывают, а в произвольном месте на плоскостиП2строят отрезок
не изменится, но он займет нужное нам положение перпендикулярности к плоскостиП1. Ось вращения не показывают, а в произвольном месте на плоскостиП2строят отрезок перпендикулярный осих.
перпендикулярный осих.
3. Строят горизонтальную проекцию нового положения отрезка АВ— .
.
Т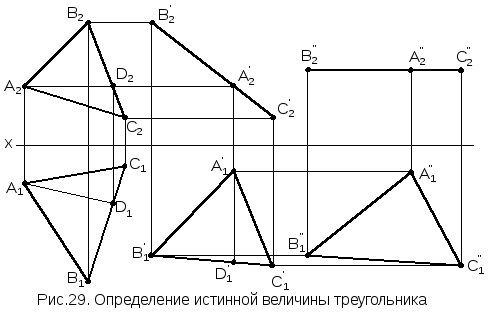 аким же образом возможно производить вращение фигуры.
аким же образом возможно производить вращение фигуры.
Задача. Дано (рис.29): плоскость задана треугольником АВС. Необходимо определить его истинные размеры.
Решение. Чтобы определить истинные размеры длин сторон треугольника и его углов необходимо развернуть его до положения параллельности какой либо плоскости проекций.
1. Строят во фронтальной проекции АВСгоризонтальА2D2. Строят ее горизонтальную проекциюA1D1.
2. Вращают горизонталь A1D1так, чтобы она приняла положение перпендикулярное плоскостиП2— . Вместе с ней вращается и треугольникА1В1С1. Размеры его при таком вращении не изменятся, но он примет положение
. Вместе с ней вращается и треугольникА1В1С1. Размеры его при таком вращении не изменятся, но он примет положение . Строят его фронтальную проекцию
. Строят его фронтальную проекцию .
.
3. Вращают проекцию  вокруг оси перпендикулярной плоскостиП2до положения, когдаАВСстанет параллелен плоскостиП1. Ось вращения не показывают, зная, что величина отрезка
вокруг оси перпендикулярной плоскостиП2до положения, когдаАВСстанет параллелен плоскостиП1. Ось вращения не показывают, зная, что величина отрезка не изменится, но он займет положение параллельное осих—
не изменится, но он займет положение параллельное осих— .
.
4. Строят горизонтальную проекцию  треугольникаАВСв положении когда он параллелен плоскостиП1, то есть фигура
треугольникаАВСв положении когда он параллелен плоскостиП1, то есть фигура изображаетАВСв его истинной величине.
изображаетАВСв его истинной величине.
Источник
Методы преобразования комплексного чертежа (эпюра Монжа)
Описание: Сущность этого метода заключается в следующем: положение точек линий плоских фигур поверхностей в пространстве не изменяется а система П1 П2 заменяется дополняется плоскостями образующими с П1 или П2 или между собой системы двух взаимно перпендикулярных плоскостей принимаемых за плоскости проекций. Если введение одной плоскости П4 или П5 не позволяет решить задачу то прибегают к последовательному дополнению основной системы плоскостей проекций новыми П6 П7 и т. показано преобразование проекций точки А из системы П2 П1 в систему П4.
Дата добавления: 2015-01-27
Размер файла: 205.31 KB
Работу скачали: 9 чел.
Поделитесь работой в социальных сетях
Если эта работа Вам не подошла внизу страницы есть список похожих работ. Так же Вы можете воспользоваться кнопкой поиск
Методы преобразования комплексного чертежа (эпюра Монжа)
7.1. Четыре основных задачи на преобразование
При разработке чертежей объектов необходимо давать наиболее выгодное изображение объекта в целом или его исследуемых элементов. Этого можно достичь, если прямые линии, плоские фигуры (основания, грани, ребра, оси) геометрических тел находятся в частном положении, чего можно достигнуть путем построения новых дополнительных проекций, исходя из двух заданных. Эти дополнительные проекции дают либо вырожденные проекции отдельных элементов, либо эти элементы в натуральную величину. Так вот построение дополнительных проекций называют преобразованием эпюра (чертежа).
Четыре основных задачи на преобразования.
- Определение величины отрезка АВ общего положения;
- Приведение отрезка прямой общего положения в проецирующее положение;
- Приведение плоской фигуры общего положение в проецирующее положение;
- Определение натурального вида плоской фигуры.
Кроме указанных выше задач указанным методом можно определить расстояние между двумя скрещивающимися прямыми.
Преобразование эпюра может быть выполнено следующими методами:
- заменой плоскостей проекций;
- плоскопараллельным перемещением;
- вращением вокруг линий уровня;
- совмещением.
Рассмотрим эти методы подробно.
7.2. Метод замены (перемены) плоскостей проекций
Этот метод широко применяют во всех отраслях машиностроения и приборостроения. Сущность этого метода заключается в следующем: положение точек, линий, плоских фигур, поверхностей в пространстве не изменяется, а система П 1 /П 2 заменяется (дополняется) плоскостями, образующими с П 1 или П 2 (или между собой) системы двух взаимно перпендикулярных плоскостей, принимаемых за плоскости проекций.
Каждая новая система выбирается так, чтобы по отношению к заданным геометрическим элементам она заняла положение наиболее удобное для выполнения требуемого построения.
В ряде случаев для получения системы плоскостей проекций, разрешающей поставленную задачу, бывает достаточно ввести (заменить) только одну плоскость, например П 4 ^ П 1 или П 5 ^ П 2 при этом плоскость П 4 окажется горизонтально-проецирующей, а плоскость П 5 фронтально-проецирующей. Если введение одной плоскости П 4 или П 5 не позволяет решить задачу, то прибегают к последовательному дополнению основной системы плоскостей проекций новыми (П 6 , П 7 и т.д.).
На рис. 4.1. показано преобразование проекций точки А из системы П 2 /П 1 в систему П 4 /П 1 , в которой вместо плоскости П 2 введена новая плоскость П 4 , а плоскость П 1 осталась неизменной. При этом плоскость П 4 перпендикулярна плоскости П 1 . В системе П 4 /П 1 горизонтальная проекция А 1 точки А осталась неизменной.

Проекция А 4 точки А на плоскость П 4 находиться на плоскости П 1 на том же расстоянии (. ), что и проекция А 2 точки А на плоскость П 2 . это условие позволяет легко строить проекцию точки на новой плоскости проекций (рис. 7.2).

Для этого в новой системе (П 1 /П 4 ) из проекции точки (А 1 ) на сохраняющейся плоскости проекций проводят линию связи, перпендикулярную новой оси проекций (П 4 /П 1 ). На этой линии связи отмечают расстояние от оси П 4 /П 1 до проекции А 4 точки А на новой плоскости проекций П 4 , равное расстоянию от преобразуемой проекции А 2 точки до оси П 2 /П 1 | А 4 *2 | = | А 2 *1 | .
При введении новой плоскости проекций, перпендикулярной фронтальной плоскости проекций (например, плоскости П 4 на рис. 7.3), расстояние от проекции (В 4 ) точки В до новой оси проекций (П 4 /П 2 ) равно расстоянию от горизонтальной проекции (В 1 ) до оси П 2 /П 1 | В 1 *1 | = | В 4 *2 | .

В дальнейшем при введении новой плоскости проекций ось проекций можно обозначать в виде дроби, черта которой лежит на оси; каждую букву при этом пишут как бы на «своей» плоскости.
Определение длины отрезка АВ общего положения (рис. 7.4)
Заменим плоскость П 2 на П 4 ½½ АВ (ось П 1 /П 4 ½½ А 1 В 1 ). Расстояния от оси П 1 /П 4 до А 4 и В 4 равны расстояниям от А 2 и В 2 до оси П 2 /П 1 соответственно | А 4 *2 | = | А 2 *1 | . Одновременно с определением действительной величины отрезка АВ определена величина a угла наклона к плоскости П 1 .

Приведение отрезка прямой АВ общего положения в проецирующее положение (в продолжение предыдущего примера).
На том же рис. 7.4 новая система плоскостей проекций П 4 /П 1 относительно отрезка АВ находиться в частном положении (П 4 ½½ АВ). Введем еще одну плоскость проекций П 5 ^ П 4 и отрезку АВ (ось проекций П 4 /П 5 ^ А 4 В 4 ). Относительно этой плоскости проекций П 5 отрезок АВ занимает проецирующее положение (А 5 = В 5 , | А 1 *2 | = | А 5 *3 | ).
Необходимо заметить, что для преобразования эпюра отрезка общего положения в проецирующее требуется введение двух новых плоскостей проекции последовательно, первой параллельно отрезку, второй перпендикулярно ему. При этом должны выполняться условия перпендикулярности исходных и новых плоскостей проекций, а также сохранения координат проекций точек на заменяемых плоскостях проекций.
Приведение плоской фигуры общего положения в проецирующее положение, а также определение её натуральной величины .
На первом этапе задачу решают с помощью одной из линий уровня, например, горизонтали с проекциями А 2 F 2 , A 1 F 1 (рис. 7.5). Новая плоскость проекций П 4 в этом случае выбрана перпендикулярно горизонтали AF (ось П 1 /П 4 ^ A 1 F 1 ) и соответственно перпендикулярно плоскости П 1 .

Откладывая на линиях связи от оси П 1 /П 4 координаты вершин А, В, и С с плоскости П 2 на плоскость П 4 , получим проекции указанных вершин (А 4 , В 4 и С 4 ), которые будут расположены на одной линии (т.е. плоскость D АВС ^ П 4 ).
На втором этапе решения задачи (определить натуральную величину треугольника АВС) вводим новую плоскость проекций П 5 ^ П 4 и параллельно плоскости треугольника АВС (т.е. его проекции А 4 В 4 С 4 ). Проведя линии связи от А 4 , В 4 и С 4 перпендикулярно оси П 4 /П 5 и отложив на них от этой оси координаты вершин А, В и С с горизонтальной проекции треугольника АВС на плоскости П 5 (А 5 , В 5 и С 5 ), получим натуральную величину треугольника АВС и углов при его вершинах.
Определение расстояния между двумя скрещивающимися прямыми.
Это расстояние выражается длиной общего перпендикуляра MN к заданным прямым АВ и С D . (рис. 7.6)

Для решения этой задачи необходимо, чтобы одна из этих прямых располагалась перпендикулярно плоскости проекций. Для этого необходимо последовательно ввести две новые плоскости проекций (П 4 и П 5 ) для превращения одной из прямых (например АВ) сначала в линию уровня (с помощью плоскости П 4 ), а затем в проецирующую ( с помощью плоскости П 5 ), после чего опустить перпендикуляр из проекции слившихся в одну точек А и В (А 5 = В 5 ) на проекцию С 5 D 5 ( M 5 N 5 действительно искомое расстояние).
7.3. Метод плоско-параллельного перемещения
Этот метод является разновидностью метода вращения. Как известно, при вращении некоторой точки вокруг своей оси она описывает окружность, расположенную в плоскости, перпендикулярной оси вращения (рис.7.7).
Метод предусматривает построение дополнительных чертежей предмета вращением этого предмета вокруг оси в неизменной основной системе плоскостей проекций. Он широко используется в технике при рассмотрении и исследовании различных вращающихся форм конструкций механизмов и машин.
Одним из приложений метода в инженерной практике является исследование траекторий точек вращающихся элементов конструкций. На рис. 7.7 представлена схема вращения точки А вокруг оси MN .

В качестве оси вращения обычно используют прямые перпендикулярные или параллельные плоскостям проекций. На рис. 7.8 изображен эпюр вращения точки А вокруг оси MN ^ П 1 .
Плоскость вращения Т ½½ П 1 и на фронтальной проекции изображена следом Т 2 . Горизонтальная проекция О 1 центра вращения О совпадает с проекцией M 1 N 1 оси, а горизонтальная проекция О 1 А 1 радиуса вращения ОА является его натуральной величиной. Поворот точки А на рис. 4.8 произведен на угол j против часовой стрелки так, чтобы в новом положении точки с проекциями  2,
2,  1 радиус вращения был параллелен плоскости П 2 . При вращении точки вокруг вертикальной оси её горизонтальная проекция перемещается по окружности, а фронтальная проекция по прямой параллельно оси ОХ.
1 радиус вращения был параллелен плоскости П 2 . При вращении точки вокруг вертикальной оси её горизонтальная проекция перемещается по окружности, а фронтальная проекция по прямой параллельно оси ОХ.

7.4. Метод вращения вокруг проецирующей прямой
Этот метод применяют при решении некоторых задач, например при определении натуральной величины отрезка прямой. Для этого (рис. 7.9) достаточно ось вращения с проекциями M 2 N 2 , M 1 N 1 выбрать так, чтобы она проходила через одну из крайних точек отрезка, например, точку с проекциями В 1 В 2 . Тогда при повороте точки А на угол j в положение  (О
(О  ½½ П 2 , О 1
½½ П 2 , О 1  1 ½½ Х) отрезок АВ перемещается в положение АВ ½½ П 2 и, следовательно, проецируется на неё в натуральную величину ([В 2
1 ½½ Х) отрезок АВ перемещается в положение АВ ½½ П 2 и, следовательно, проецируется на неё в натуральную величину ([В 2  2 ] = [АВ]). Одновременно в натуральную величину будет проецироваться угол a наклона отрезка АВ к плоскости П 1 .
2 ] = [АВ]). Одновременно в натуральную величину будет проецироваться угол a наклона отрезка АВ к плоскости П 1 .

Следует отметить, что при вращении объекта его проекция на плоскости, перпендикулярной к оси вращения, не изменяет своей формы и размеров. Что же касается другой проекции на плоскости, параллельной оси вращения, то все точки этой проекции (кроме точек на оси вращения) перемещаются па прямым, параллельным оси проекций, и проекция изменяется по форме и по величине. Этим пользуются при методе плоскопараллельного перемещения, не задаваясь изображением оси вращения и не устанавливая радиуса вращения. При этом достаточно, не изменяя вида и величины одной из проекций рассматриваемой фигуры, переместить эту проекцию в требуемое положение, а затем построить другую проекцию по изложенной выше методике.
На рис. 7.10 произведены построения для определения истинной величины отрезка АВ методом плоскопараллельного перемещения.

7.5 Метод вращения вокруг линии уровня
Этот метод также является разновидностью метода вращения и применяется для определения истинной величины плоских фигур, углов и т.д. Эти задачи решаются при повороте плоской фигуры вокруг одной из её линий уровня (обычно горизонтали или фронтали) до положения, параллельного одной из плоскостей проекций (П 1 или П 2 ).
При вращении какой либо плоской фигуры вокруг её линии уровня необходимо определить истинную величину радиуса вращения для построения проекции совмещения только одной точки; проекции совмещений остальных точек можно построить, не определяя их истинных радиусов вращения, а используя неподвижные точки прямых, на которых находятся эти точки (рис. 7.11). Как указывалось выше, этот метод более целесообразен при решении метрических задач с плоскими фигурами.

7.6. Метод вращения вокруг следов плоскости (совмещение)
При изображении объекта в плоскости, заданной следами, иногда целесообразно использовать метод совмещения этой плоскости с одной из плоскостей проекции.
Этот метод также является частным случаем метода вращения. Осью вращения при этом является один из следов плоскости, а второй её след совмещается с той же плоскостью проекций (рис. 7.12).

Совмещенное положение следа плоскости получают при вращении произвольной точки этого следа в плоскости, перпендикулярной другому следу плоскости.
Источник



