
- Методы преобразования комплексного чертежа (эпюра Монжа)
- Лекция 4. Способы преобразования ортогонального чертежа
- 4.1. Способ перемены плоскостей проекций
- Упражнение
- Упражнение
- 4.2. Способ вращения
- Упражнение
- 4.3. Определение истинной величины треугольника способом вращения
- 4.4. Задачи для самостоятельной работы
Методы преобразования комплексного чертежа (эпюра Монжа)
Описание: Сущность этого метода заключается в следующем: положение точек линий плоских фигур поверхностей в пространстве не изменяется а система П1 П2 заменяется дополняется плоскостями образующими с П1 или П2 или между собой системы двух взаимно перпендикулярных плоскостей принимаемых за плоскости проекций. Если введение одной плоскости П4 или П5 не позволяет решить задачу то прибегают к последовательному дополнению основной системы плоскостей проекций новыми П6 П7 и т. показано преобразование проекций точки А из системы П2 П1 в систему П4.
Дата добавления: 2015-01-27
Размер файла: 205.31 KB
Работу скачали: 9 чел.
Поделитесь работой в социальных сетях
Если эта работа Вам не подошла внизу страницы есть список похожих работ. Так же Вы можете воспользоваться кнопкой поиск
Методы преобразования комплексного чертежа (эпюра Монжа)
7.1. Четыре основных задачи на преобразование
При разработке чертежей объектов необходимо давать наиболее выгодное изображение объекта в целом или его исследуемых элементов. Этого можно достичь, если прямые линии, плоские фигуры (основания, грани, ребра, оси) геометрических тел находятся в частном положении, чего можно достигнуть путем построения новых дополнительных проекций, исходя из двух заданных. Эти дополнительные проекции дают либо вырожденные проекции отдельных элементов, либо эти элементы в натуральную величину. Так вот построение дополнительных проекций называют преобразованием эпюра (чертежа).
Четыре основных задачи на преобразования.
- Определение величины отрезка АВ общего положения;
- Приведение отрезка прямой общего положения в проецирующее положение;
- Приведение плоской фигуры общего положение в проецирующее положение;
- Определение натурального вида плоской фигуры.
Кроме указанных выше задач указанным методом можно определить расстояние между двумя скрещивающимися прямыми.
Преобразование эпюра может быть выполнено следующими методами:
- заменой плоскостей проекций;
- плоскопараллельным перемещением;
- вращением вокруг линий уровня;
- совмещением.
Рассмотрим эти методы подробно.
7.2. Метод замены (перемены) плоскостей проекций
Этот метод широко применяют во всех отраслях машиностроения и приборостроения. Сущность этого метода заключается в следующем: положение точек, линий, плоских фигур, поверхностей в пространстве не изменяется, а система П 1 /П 2 заменяется (дополняется) плоскостями, образующими с П 1 или П 2 (или между собой) системы двух взаимно перпендикулярных плоскостей, принимаемых за плоскости проекций.
Каждая новая система выбирается так, чтобы по отношению к заданным геометрическим элементам она заняла положение наиболее удобное для выполнения требуемого построения.
В ряде случаев для получения системы плоскостей проекций, разрешающей поставленную задачу, бывает достаточно ввести (заменить) только одну плоскость, например П 4 ^ П 1 или П 5 ^ П 2 при этом плоскость П 4 окажется горизонтально-проецирующей, а плоскость П 5 фронтально-проецирующей. Если введение одной плоскости П 4 или П 5 не позволяет решить задачу, то прибегают к последовательному дополнению основной системы плоскостей проекций новыми (П 6 , П 7 и т.д.).
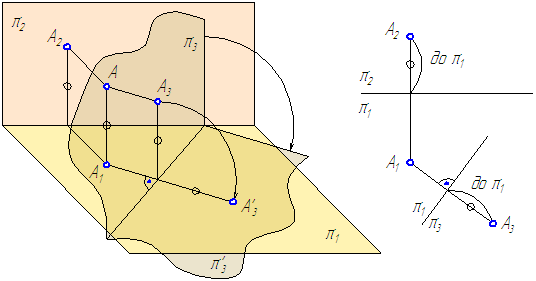
На рис. 4.1. показано преобразование проекций точки А из системы П 2 /П 1 в систему П 4 /П 1 , в которой вместо плоскости П 2 введена новая плоскость П 4 , а плоскость П 1 осталась неизменной. При этом плоскость П 4 перпендикулярна плоскости П 1 . В системе П 4 /П 1 горизонтальная проекция А 1 точки А осталась неизменной.

Проекция А 4 точки А на плоскость П 4 находиться на плоскости П 1 на том же расстоянии (. ), что и проекция А 2 точки А на плоскость П 2 . это условие позволяет легко строить проекцию точки на новой плоскости проекций (рис. 7.2).

Для этого в новой системе (П 1 /П 4 ) из проекции точки (А 1 ) на сохраняющейся плоскости проекций проводят линию связи, перпендикулярную новой оси проекций (П 4 /П 1 ). На этой линии связи отмечают расстояние от оси П 4 /П 1 до проекции А 4 точки А на новой плоскости проекций П 4 , равное расстоянию от преобразуемой проекции А 2 точки до оси П 2 /П 1 | А 4 *2 | = | А 2 *1 | .
При введении новой плоскости проекций, перпендикулярной фронтальной плоскости проекций (например, плоскости П 4 на рис. 7.3), расстояние от проекции (В 4 ) точки В до новой оси проекций (П 4 /П 2 ) равно расстоянию от горизонтальной проекции (В 1 ) до оси П 2 /П 1 | В 1 *1 | = | В 4 *2 | .

В дальнейшем при введении новой плоскости проекций ось проекций можно обозначать в виде дроби, черта которой лежит на оси; каждую букву при этом пишут как бы на «своей» плоскости.
Определение длины отрезка АВ общего положения (рис. 7.4)
Заменим плоскость П 2 на П 4 ½½ АВ (ось П 1 /П 4 ½½ А 1 В 1 ). Расстояния от оси П 1 /П 4 до А 4 и В 4 равны расстояниям от А 2 и В 2 до оси П 2 /П 1 соответственно | А 4 *2 | = | А 2 *1 | . Одновременно с определением действительной величины отрезка АВ определена величина a угла наклона к плоскости П 1 .

Приведение отрезка прямой АВ общего положения в проецирующее положение (в продолжение предыдущего примера).
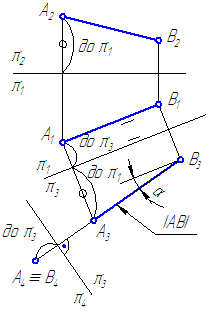
На том же рис. 7.4 новая система плоскостей проекций П 4 /П 1 относительно отрезка АВ находиться в частном положении (П 4 ½½ АВ). Введем еще одну плоскость проекций П 5 ^ П 4 и отрезку АВ (ось проекций П 4 /П 5 ^ А 4 В 4 ). Относительно этой плоскости проекций П 5 отрезок АВ занимает проецирующее положение (А 5 = В 5 , | А 1 *2 | = | А 5 *3 | ).
Необходимо заметить, что для преобразования эпюра отрезка общего положения в проецирующее требуется введение двух новых плоскостей проекции последовательно, первой параллельно отрезку, второй перпендикулярно ему. При этом должны выполняться условия перпендикулярности исходных и новых плоскостей проекций, а также сохранения координат проекций точек на заменяемых плоскостях проекций.
Приведение плоской фигуры общего положения в проецирующее положение, а также определение её натуральной величины .
На первом этапе задачу решают с помощью одной из линий уровня, например, горизонтали с проекциями А 2 F 2 , A 1 F 1 (рис. 7.5). Новая плоскость проекций П 4 в этом случае выбрана перпендикулярно горизонтали AF (ось П 1 /П 4 ^ A 1 F 1 ) и соответственно перпендикулярно плоскости П 1 .

Откладывая на линиях связи от оси П 1 /П 4 координаты вершин А, В, и С с плоскости П 2 на плоскость П 4 , получим проекции указанных вершин (А 4 , В 4 и С 4 ), которые будут расположены на одной линии (т.е. плоскость D АВС ^ П 4 ).
На втором этапе решения задачи (определить натуральную величину треугольника АВС) вводим новую плоскость проекций П 5 ^ П 4 и параллельно плоскости треугольника АВС (т.е. его проекции А 4 В 4 С 4 ). Проведя линии связи от А 4 , В 4 и С 4 перпендикулярно оси П 4 /П 5 и отложив на них от этой оси координаты вершин А, В и С с горизонтальной проекции треугольника АВС на плоскости П 5 (А 5 , В 5 и С 5 ), получим натуральную величину треугольника АВС и углов при его вершинах.
Определение расстояния между двумя скрещивающимися прямыми.
Это расстояние выражается длиной общего перпендикуляра MN к заданным прямым АВ и С D . (рис. 7.6)

Для решения этой задачи необходимо, чтобы одна из этих прямых располагалась перпендикулярно плоскости проекций. Для этого необходимо последовательно ввести две новые плоскости проекций (П 4 и П 5 ) для превращения одной из прямых (например АВ) сначала в линию уровня (с помощью плоскости П 4 ), а затем в проецирующую ( с помощью плоскости П 5 ), после чего опустить перпендикуляр из проекции слившихся в одну точек А и В (А 5 = В 5 ) на проекцию С 5 D 5 ( M 5 N 5 действительно искомое расстояние).
7.3. Метод плоско-параллельного перемещения
Этот метод является разновидностью метода вращения. Как известно, при вращении некоторой точки вокруг своей оси она описывает окружность, расположенную в плоскости, перпендикулярной оси вращения (рис.7.7).
Метод предусматривает построение дополнительных чертежей предмета вращением этого предмета вокруг оси в неизменной основной системе плоскостей проекций. Он широко используется в технике при рассмотрении и исследовании различных вращающихся форм конструкций механизмов и машин.
Одним из приложений метода в инженерной практике является исследование траекторий точек вращающихся элементов конструкций. На рис. 7.7 представлена схема вращения точки А вокруг оси MN .

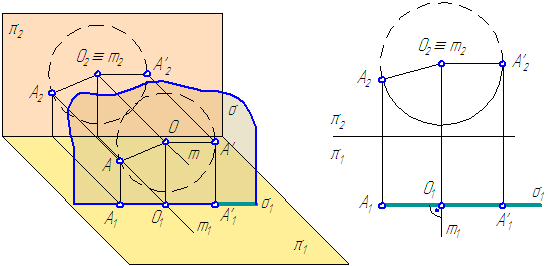
В качестве оси вращения обычно используют прямые перпендикулярные или параллельные плоскостям проекций. На рис. 7.8 изображен эпюр вращения точки А вокруг оси MN ^ П 1 .
Плоскость вращения Т ½½ П 1 и на фронтальной проекции изображена следом Т 2 . Горизонтальная проекция О 1 центра вращения О совпадает с проекцией M 1 N 1 оси, а горизонтальная проекция О 1 А 1 радиуса вращения ОА является его натуральной величиной. Поворот точки А на рис. 4.8 произведен на угол j против часовой стрелки так, чтобы в новом положении точки с проекциями  2,
2,  1 радиус вращения был параллелен плоскости П 2 . При вращении точки вокруг вертикальной оси её горизонтальная проекция перемещается по окружности, а фронтальная проекция по прямой параллельно оси ОХ.
1 радиус вращения был параллелен плоскости П 2 . При вращении точки вокруг вертикальной оси её горизонтальная проекция перемещается по окружности, а фронтальная проекция по прямой параллельно оси ОХ.

7.4. Метод вращения вокруг проецирующей прямой
Этот метод применяют при решении некоторых задач, например при определении натуральной величины отрезка прямой. Для этого (рис. 7.9) достаточно ось вращения с проекциями M 2 N 2 , M 1 N 1 выбрать так, чтобы она проходила через одну из крайних точек отрезка, например, точку с проекциями В 1 В 2 . Тогда при повороте точки А на угол j в положение  (О
(О  ½½ П 2 , О 1
½½ П 2 , О 1  1 ½½ Х) отрезок АВ перемещается в положение АВ ½½ П 2 и, следовательно, проецируется на неё в натуральную величину ([В 2
1 ½½ Х) отрезок АВ перемещается в положение АВ ½½ П 2 и, следовательно, проецируется на неё в натуральную величину ([В 2  2 ] = [АВ]). Одновременно в натуральную величину будет проецироваться угол a наклона отрезка АВ к плоскости П 1 .
2 ] = [АВ]). Одновременно в натуральную величину будет проецироваться угол a наклона отрезка АВ к плоскости П 1 .

Следует отметить, что при вращении объекта его проекция на плоскости, перпендикулярной к оси вращения, не изменяет своей формы и размеров. Что же касается другой проекции на плоскости, параллельной оси вращения, то все точки этой проекции (кроме точек на оси вращения) перемещаются па прямым, параллельным оси проекций, и проекция изменяется по форме и по величине. Этим пользуются при методе плоскопараллельного перемещения, не задаваясь изображением оси вращения и не устанавливая радиуса вращения. При этом достаточно, не изменяя вида и величины одной из проекций рассматриваемой фигуры, переместить эту проекцию в требуемое положение, а затем построить другую проекцию по изложенной выше методике.
На рис. 7.10 произведены построения для определения истинной величины отрезка АВ методом плоскопараллельного перемещения.

7.5 Метод вращения вокруг линии уровня
Этот метод также является разновидностью метода вращения и применяется для определения истинной величины плоских фигур, углов и т.д. Эти задачи решаются при повороте плоской фигуры вокруг одной из её линий уровня (обычно горизонтали или фронтали) до положения, параллельного одной из плоскостей проекций (П 1 или П 2 ).
При вращении какой либо плоской фигуры вокруг её линии уровня необходимо определить истинную величину радиуса вращения для построения проекции совмещения только одной точки; проекции совмещений остальных точек можно построить, не определяя их истинных радиусов вращения, а используя неподвижные точки прямых, на которых находятся эти точки (рис. 7.11). Как указывалось выше, этот метод более целесообразен при решении метрических задач с плоскими фигурами.

7.6. Метод вращения вокруг следов плоскости (совмещение)
При изображении объекта в плоскости, заданной следами, иногда целесообразно использовать метод совмещения этой плоскости с одной из плоскостей проекции.
Этот метод также является частным случаем метода вращения. Осью вращения при этом является один из следов плоскости, а второй её след совмещается с той же плоскостью проекций (рис. 7.12).

Совмещенное положение следа плоскости получают при вращении произвольной точки этого следа в плоскости, перпендикулярной другому следу плоскости.
Источник
Лекция 4. Способы преобразования ортогонального чертежа
4.1. Способ перемены плоскостей проекций
Чаще всего геометрические объекты расположены относительно плоскостей проекций в общем положении, и при решении задач для достижения поставленной цели необходимо выполнять много построений.
Количество построений можно значительно сократить, если геометрические элементы будут расположены в частном положении относительно плоскостей проекций.
Существуют два основных способа преобразования чертежа, при которых:
- Объект остаётся неподвижным, при этом меняется аппарат проецирования;
- Условия проецирования не меняются, но изменяется положение объекта в пространстве.
К первому способу относится способ перемены плоскостей проекций.
Ко второму – способ вращения (вращение вокруг линии уровня и вращение вокруг проецирующей прямой); способ плоскопараллельного перемещения.
Рассмотрим наиболее часто используемые способы при решении задач.
Способ перемены плоскостей проекций или способ введения дополнительных плоскостей проекций (ДПП) позволяет перейти от заданной системы плоскостей проекций к новой системе, более удобной для решения той или иной задачи.
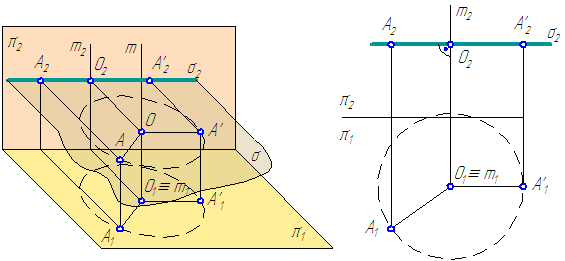
Рассмотрим положение точки А относительно известной системы плоскостей проекций π2⊥π1 (Рисунок 4.1, а и б).
Введём π4⊥π1, при этом получим новую систему двух взаимно перпендикулярных плоскостей. Положение точки А на эпюре будет в этом случае задано проекциями А1 и А4.
Правила перемены плоскостей проекций:
- Новая плоскость проекций вводится перпендикулярно, по крайней мере, одной из заданных на чертеже плоскостей проекций;
- ДПП располагается относительно проецируемого объекта в частном положении, удобном для решения поставленной задачи;
- Новую плоскость совмещаем вращением вокруг новой оси проекций с плоскостью, которой она перпендикулярна на свободное место так, чтобы проекции не накладывались друг на друга.
а б
Рисунок 4.1 – Способ перемены плоскостей проекций
- На чертеже новая проекция геометрического элемента находится на линии связи, перпендикулярной новой оси проекций:
- Расстояние от А4 до π1/π4 равно расстоянию от А2 до π2/π1, так как величина этих отрезков (отмечены ○) определяет расстояние от точки А до плоскости проекций π1.
При решении задачи необходимо заранее обдумать, как расположить новую плоскость проекций относительно заданных геометрических объектов (прямой, плоскости и др.), и как на чертеже провести новую ось проекций, чтобы в новой системе плоскостей заданные объекты заняли бы частные положения по отношению к новой плоскости проекций.
Упражнение
1. Спроецировать отрезок общего положения АВ в точку.
- Введём ДПП π4//А1В1 и π4⊥π1 (Рисунок 4.2). В новой системе двух взаимно перпендикулярных плоскостей проекций π1/π4 отрезок АВспроецируется на π4 в натуральную величину и по этой проекции можем определить угол наклона отрезка к плоскости проекций π1
Упражнение
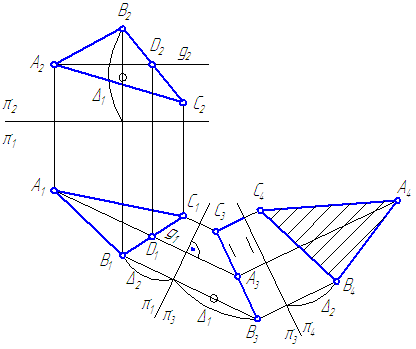
2. Дана плоскость общего положения – σ, заданная треугольником АВС (Рисунок 4.3).
Определить истинную величину треугольника.
- Введём ДПП π4⊥σ и π4⊥π1, для чего построим горизонталь в плоскости треугольника и проведём новую ось проекций π1/π4⊥g1согласно теореме о перпендикуляре к плоскости. На π4 плоскость σ спроецируется в прямую, что означает σ⊥πp4.
- Введём ДПП π5//σ (π4/π5//А4В4С4) и π4⊥π5. На π5 проекция А5В5С5 – есть истинная величина треугольника.
4.2. Способ вращения
Сущность способа вращения состоит в том, что положение системы плоскостей проекций считается неизменным в пространстве, а положение проецируемого объекта относительно неподвижных плоскостей изменяется.
Из сравнения сущности обоих способов видно, что решение задач, которые требуют применения преобразования ортогонального чертежа, может быть выполнено любым из этих способов, результат при этом должен получиться одинаковым. Основа выбора того или иного способа – рациональность решения.
Вращение заданных элементов будем осуществлять вокруг проецирующей прямой, то есть прямой, перпендикулярной какой-либо плоскости проекций, при этом все точки заданных элементов поворачиваются в одну и ту же сторону на один и тот же угол (Рисунок 4.4, а и б). Ось вращения и объект вращения составляют твёрдое тело.
А – точка в пространстве;
О – центр вращения точки А;
АО – радиус вращения
а б
Рисунок 4.4 – Способ вращения вокруг прямой, перпендикулярной π2
Точка описывает в пространстве окружность радиусом АО. Плоскость окружности перпендикулярна оси вращения (σ⊥m).
Так как m⊥π2 , то σ//π2, следовательно, σ⊥π1, ⇒ σ1⊥m1, и поэтому σ проецируется на π1 в виде прямой, перпендикулярной проекции оси вращения, а на π2 траектория вращающейся точки проецируется в виде окружности с центром О2≡m2.
Пусть ось вращения m⊥π1 (Рисунок 4.5, а и б). Плоскость окружности σ⊥m.
а б
Рисунок 4.5 – Вращение вокруг прямой, перпендикулярной π1
\left.\begin
Свойства проекций
- На плоскость проекций, перпендикулярную оси вращения, траектория вращающейся вокруг этой оси точки проецируется без искажения, то есть в окружность с центром, совпадающим с проекцией оси вращения на эту плоскость и радиусом, равным расстоянию от вращаемой точки до оси вращения.
- На плоскость проекций, параллельную оси вращения, траектория вращающейся точки проецируется в отрезок, перпендикулярный проекции оси вращения на эту плоскость.
- На плоскость проекций, перпендикулярную оси вращения, проекция вращаемого объекта своих размеров и формы не меняет.
Упражнение
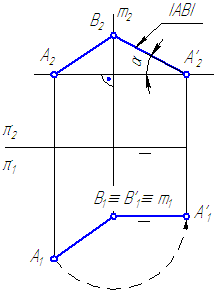
Дано : отрезок общего положения – АВ.
Определить : способом вращения истинную величину отрезка и углы наклона его к плоскостям проекций.
1. Выберем ось вращения m⊥π1 и проходящую через точку В (Рисунок 4.6).
На плоскости проекций π2 проекция траектории перемещения точки А – прямая,
A_2 \overline
На плоскости проекций π1 проекция траектории перемещения точки А – окружность радиусом |А1В1|.
Повернем отрезок до положения, параллельного плоскости проекций π2. Получим натуральную величину отрезка.
Угол наклона отрезка АВ к плоскости проекций π1 будет угол
\alpha=\angle\widehat
Для того, чтобы определить угол наклона АВ к плоскости проекций π2, надо ввести новую ось вращения перпендикулярно π2 и повторить построения.
4.3. Определение истинной величины треугольника способом вращения
Пусть плоскость σ задана треугольником. Необходимо определить истинную величину треугольника (Рисунок 4.7).
Одним поворотом вокруг оси, перпендикулярной к плоскости проекций, истинную форму треугольника получить нельзя (так же как и введением одной ДПП).
Вращая вокруг оси m, перпендикулярной π1 можно расположить плоскость ΔАВС⊥π2 (а вращая вокруг оси n⊥π2 можно расположить плоскость ΔАВС⊥π1).
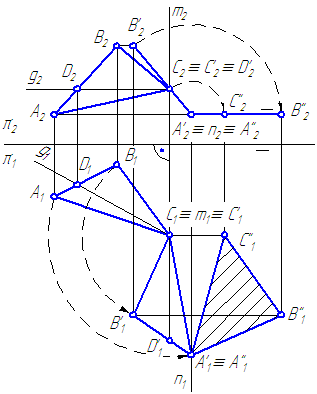
Рисунок 4.7
- Положим σ’ должна быть перпендикулярна π2. Для чего построим CD – горизонталь h плоскости σ. Введём первую ось вращения m⊥π1, например, через точку С.
- Повернём треугольник вокруг m до положения, когда
\overline\perp\pi_2\Rightarrow\overline _1\overline _1\perp\pi_2/\pi_1
На основании 3-го свойства, новая горизонтальная проекция треугольника \overlineпо величине должна равняться A1B1C1, а фронтальная проекция треугольника будет представлять отрезок. - Введём вторую ось вращения n⊥π2 через точку \overline_2 . Повернём фронтальную проекцию \overline
в новое положение \overline<\overline \overline \overline >\parallel\pi_2/\pi_1 . На π1 получим треугольник \overline<\overline \overline \overline > , равный истинной величине треугольника АВС.
4.4. Задачи для самостоятельной работы
Двумя способами преобразования ортогонального чертежа:
1. Определить расстояние от точки D до отрезка АВ – общего положения (Рисунок 4.8).
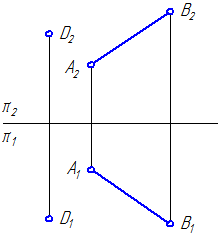
Рисунок 4.8
2. Определить расстояние между двумя параллельными прямыми общего положения (АВ//CD) (Рисунок 4.9).
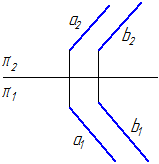
Рисунок 4.9
3. Определить расстояние между двумя скрещивающимися прямыми, заданными отрезками АВ и CD (Рисунок 4.10).
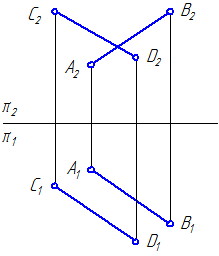
Рисунок 4.10
4. Построить недостающую проекцию точки D при условии, что задана σ=ΔАВС – общего положения и первая проекция точки D1, Dотстоит от плоскости σ на 30 мм (Рисунок 4.11).
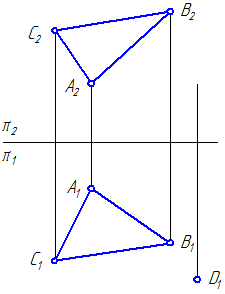
Рисунок 4.11
5. Дан отрезок АВ – общего положения. Ось вращения не проходит через АВ (Рисунок 4.12). Определить способом вращения истинную величину АВ.
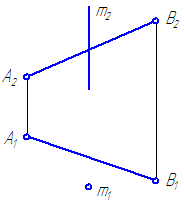
Рисунок 4.12
6. Задана прямая общего положения m и точка А вне прямой. Построить плоскость, проходящую через точку А и перпендикулярную прямой m (Рисунок 4.13).
Рисунок 4.13
Источник



