
Методы представления колебаний
Существуют различные методы описания гармонических колебаний. Приведём некоторые из них.
1. Аналитический метод
Задаётся уравнение колебаний гармонического осциллятора
по которому и определяется смещение его от положения равновесия в любой момент времени.
2. Графический метод
| Рис.5.3 |
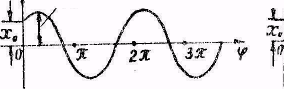
Строятся график гармонического колебания (рис.5.3) х=Аsin(ωt+φ0). По оси абсцисс (ОХ) откладывается время t или фаза колебаний ωt+φ0, по оси ординат (ОУ) – смещение х от положения равновесия.
3. Метод векторной диаграммы
| Рис.5.4 |
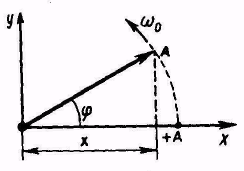
Этот метод состоит в следующем. Гармоническое колебание может быть задано с помощью вектора, длина которого равна амплитуде А колебания, а направление образует с осью х угол, равный начальной фазе колебания (рис. 5.4). Если привести этот вектор во вращение с угловой скоростью ω0, то проекция конца вектора на ось х будет перемещаться в пределах от +А до -А, а колеблющаяся величина будет изменяться со временем по закону
x = Asin(ω0t+φ0), совершая гармоническое колебание.
§ 5.2.2 Скорость и ускорение колеблющейся точки
Чтобы найти скорость материальной точки при гармоническом колебании, возьмем производную от смещения колеблющейся точки x = Asin(ω0t+φ0) по времени:
 (5.4)
(5.4)
где υmax = Аω0 — максимальная скорость (амплитуда скорости).
На основании тригонометрических формул преобразуем (4.18):
 (5.5)
(5.5)
Сравнивая выражения для смещения и скорости замечаем, что фаза скорости на  больше фазы смещения, т.е. скорость опережает по фазе смещение на
больше фазы смещения, т.е. скорость опережает по фазе смещение на  Продифференцировав (5.4), найдем ускорение:
Продифференцировав (5.4), найдем ускорение:
 (5.6)
(5.6)
где аmax = А ω0 2 — максимальное ускорение (амплитуда ускорения).
Вместо (5.5) запишем
Из сравнения (5.6) и (5.3) следует, что фазы ускорения и смещения различаются на π, т. е. эти величины изменяются в противофазе. Это значит, что при положительном максимальном смещении ускорение максимально, но отрицательно. На рисунке показаны графические зависимости смещения, скорости и ускорения от времени (рис.6.6, а) и их векторные диаграммы (рис.5.6, б) .
| Рис.5.6 |
| б ) |
| а ) |
§ 5.2.3 Кинетическая и потенциальная энергии колебательного движения
Колеблющееся тело обладает как кинетической, так и потенциальной энергией, которые последовательно переходят друг в друга при колебаниях осциллятора. Полная энергия осциллятора равна сумме кинетической и потенциальной энергии:
Кинетическая энергия тела, колеблющегося по гармоническому закону, вычисляют по формуле:
 (5.9)
(5.9)
с учётом mω 2 = k
Потенциальную энергию колебательного движения найдём, исходя из формулы для потенциальной энергии упругой деформации:
 (5.10)
(5.10)
Складывая кинетическую и потенциальную энергию, получим полную механическую энергию материальной точки, колеблющейся по гармоническому закону:
 (5.11)
(5.11)
Полученное выражение показывает, что энергия колеблющегося тела от времени не зависит, т.е. с течением времени остаётся величиной постоянной, а зависит только от квадрата амплитуды и частоты.
При отсутствии сил трения полная механическая энергия системы не изменяется:
 (5.12)
(5.12)
Графически зависимости кинетической, потенциальной и полной механической энергий колеблющейся системы от времени показаны на рис. 5.7, а.
| Рис.5.7 |
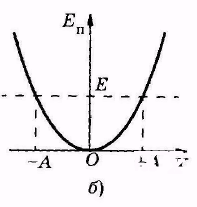
Потенциальная яма (ограниченная область пространства, в которой потенциальная энергия меньше, чем в не её), соответствующая гармоническому колебанию, изображена на рис. 5.7, б. Она определяется зависимостью 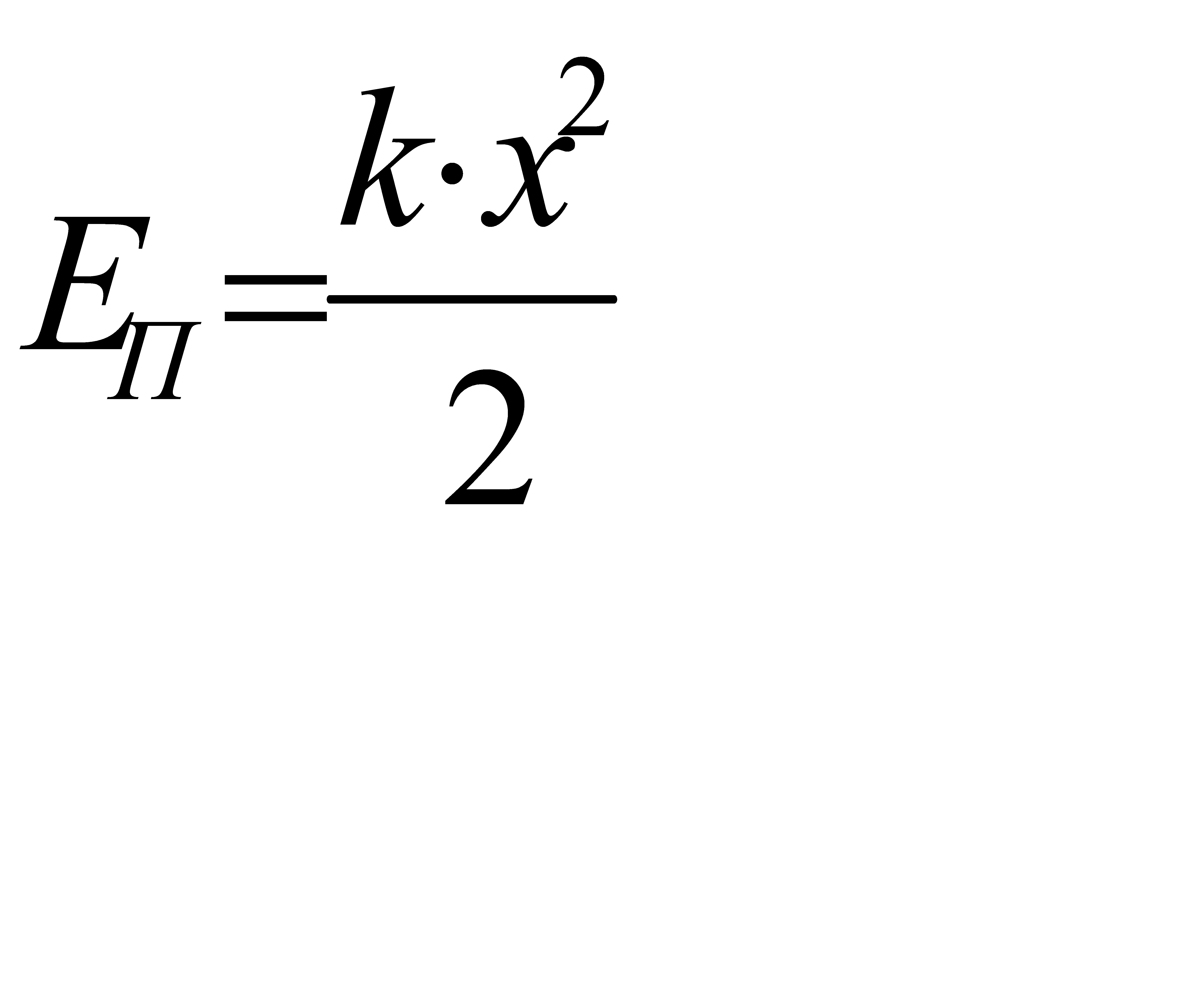 . Отложив на оси ординат полную механическую энергию Е, по графику определяют интервал координат (-А, +А), за пределы которого частица, обладающая такой энергией, выйти не может.
. Отложив на оси ординат полную механическую энергию Е, по графику определяют интервал координат (-А, +А), за пределы которого частица, обладающая такой энергией, выйти не может.
§6.2 Затухающие колебания
До сих пор мы рассматривали свободные колебания материальной точки без учёта сопротивления среды, в которой происходят эти колебания.
В реальных условиях на колеблющееся тело всегда действуют силы сопротивления (трения), в результате чего амплитуда с течением времени уменьшается и колебания становятся затухающими.
| Рис.5.8 |
Пусть маятник колеблется в вязкой среде (рис.). В этом случае на осциллятор кроме возвращающей силы Fупр = -kx будет действовать ещё одна сила – сила сопротивления среды Fс. При малых колебаниях скорость движения осциллятора мала, поэтому сила сопротивления пропорциональна скорости и направлена в противоположную сторону:
 (5.13)
(5.13)
где r – коэффициент сопротивления среды, зависящий от плотности среды и геометрических размеров осциллятора; υ — относительная скорость движения осциллятора и среды.
Уравнение затухающих колебаний записывается в виде:
Выражение А=±А0 е -δ t , есть переменная во времени амплитуда колебания; А0— амплитуда в момент t = 0; ω -частота затухающих колебаний; φ0-начальная фаза колебаний.
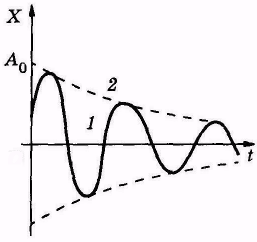
| Рис. 6.9 |
График этой функции изображён на рисунке (кривая 1)пунктирнаялиния 2изображает ход убывания амплитуды. Материальная точка колеблется по закону синуса, но амплитуда колебания с течением времени уменьшается по экспоненте. Затухания происходят тем быстрее, чем больше δ, т.е. с увеличением внутреннего трения среды и уменьшением массы осциллятора.
Наглядной характеристикой затухания является отношение двух амплитуд, отличающихся по времени на период Т. Это соотношение называется декрементом затухания
 (5.15)
(5.15)
Прологарифмируем это выражение:
 (5.16)
(5.16)
Значение θ=δТ называется логарифмическим декрементом затухания.
Время  в течении которого амплитуда убывает в е раз, называется временем жизни колеблющейся точки. За время жизни τ система успевает совершить N колебаний.
в течении которого амплитуда убывает в е раз, называется временем жизни колеблющейся точки. За время жизни τ система успевает совершить N колебаний.
 (5.17)
(5.17)
Следовательно, логарифмический декремент затухания есть величина, обратная числу колебаний осциллятора за время его жизни.
Период затухающих колебаний зависит от коэффициента сопротивления rи определяется формулой:
 (5.18)
(5.18)
§6.3 Вынужденные колебания. Резонанс
Для того, чтобы колебания осциллятора были незатухающими, надо компенсировать потери энергии на преодоления сопротивления среды. Это можно сделать следующим способом. Пусть пружинный маятник с железным грузом находится в поле тяжести электромагнита, по обмотке которого проходит переменный ток:
Магнитная сила, действующая на маятник, меняется по тому же закону Fв=F0sinωt. Эта периодически изменяющаяся внешняя сила, действующая на осциллятор, называется вынуждающей силой.
Колебания, возникающие под действием внешней периодически изменяющейся силы, называют вынужденными колебаниями.
| Рис.6.11 |
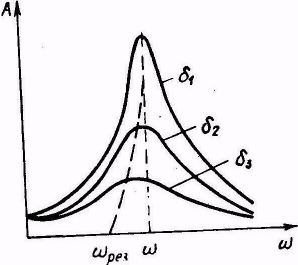
Зависимость амплитуды колебаний от частоты вынуждающей силы при различных δ приведены на рис. При ω → 0 амплитуда стремится к предельной величине, равной смещению осциллятора под действием постоянной силы F0:
 (6.42)
(6.42)
Когда частота вынуждающей силы приближается к частоте собственных колебаний осциллятора, амплитуда колебаний возрастает и при некоторой частоте достигает максимального значения. Это явление называется резонансом.
Существуют и такие колебательные системы, которые сами регулируют периодическое восполнение растраченной энергии и поэтому могут колебаться длительное время. Незатухающие колебания, существующие в какой-либо системе при отсутствии переменного внешнего воздействия, называются автоколебаниями, а сами системы — автоколебательными. Амплитуда и частота автоколебаний зависят от свойств самой автоколебательной системы, в отличие от вынужденных колебаний они не определяются внешними воздействиями.
Классическим примером механической автоколебательной системы являются часы, в которых маятник (или баланс) является колебательной системой, пружина (или поднятая гиря) — источником энергии, а анкер — регулятором поступления энергии от источника в колебательную систему. Некоторые биологические системы (сердце, легкие) являются автоколебательными.
Дата добавления: 2015-12-08 ; просмотров: 1885 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Источник
2)Гармонические колебания (рис.2.4.).
Его параметрами являются: Am – амплитуда , — частота, 0 –начальная фаза. Это пример непрерывного сигнала.
Непериодические сигналы – это сигналы, которые описываются непериодическими функциями времени. Однако их можно рассматривать как периодические, для которых Т  .
.

Примеры непериодических сигналов.
1) Сигнал типа единичная функция (ступенчатый сигнал, функция Хевисайда, рис.2.5.).
2 ) Одиночный прямоугольный импульс – это сигнал, форма которого прямоугольная (рис.2.6).
) Одиночный прямоугольный импульс – это сигнал, форма которого прямоугольная (рис.2.6).
3) Сигнал типа  (дельта – функция, функция Дирака, рис. 2.7.).
(дельта – функция, функция Дирака, рис. 2.7.).
 0, t 0
0, t 0
Э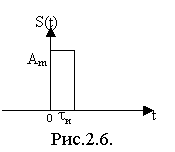
 та функция обладает свойствами: 1.
та функция обладает свойствами: 1. ;
;
2. -это
-это
соотношение называют, фильтрующее свойство дельта – функции.
Случайные сигналы – это сигналы характер изменения, которых заранее предсказать невозможно. Именно эти сигналы несут информацию о состоянии интересующего нас объекта. С математической точки зрения такие сигналы описываются методами теории вероятности или случайных процессов. Разновидностью случайных сигналов являются помехи – сигналы, которые накладываются на передаваемые сообщения и искажают его характер. По природе происхождения помехи бывают: атмосферные, индустриальные и флуктуационные.
Флуктуационные помехи связаны , с хаотичным движением свободных носителей зарядов в самих элементах электрических цепей.
2.2. Гармоническое колебание и способы его представления
Гармоническим называется колебание, которое описывается гармонической функцией времени: sin(t), cos(t).
Г армоническое колебание, а также сигнал произвольной формы могут быть представлены в следующих формах:
армоническое колебание, а также сигнал произвольной формы могут быть представлены в следующих формах:
1) временное представление сигнала;
2) комплексное представление;
3) векторное представление;
1) При временном представлении сигнал записывается в виде аналитической функцией времени: .
Его график – называется временной диаграммой (рис.2.8.). Основными параметрами гармонического сигнала являются:
Амплитуда — Am (наибольшее отклонение от нуля гармонической функции). Размерность амплитуды связана с физической природой сигнала.
2. Период — T (минимальное расстояние между точками находящимися в одной фазе), ω=2π/T — круговая частота, f=1/T – циклическая частота. Их размерность: T [сек]; f [Гц]; ω [рад/сек].
0=ωt0 – начальная фаза гармонического колебания гармонического колебания; t0 – временной сдвиг, если t0>0, то это означает опережение, если t0 2 +b 2 ) 1/2 — длины вектор комплексного числа.
φ =arg[Z] – аргумент комплексного числа Z, или φ0 = arctg(b/a) – начальная фаза.
Выражение Аme j ( ωt + φ ) называют комплексом гармонической функции. Тогда учитывая, что Аcosφ = Re

Комплексную величину  называют комплексной амплитудой гармонического сигнала, а е j ω t – множитель вращения. Комплексная амплитуда содержит информацию о двух важнейших параметрах гармонического сигнала – об амплитуде и о начальной фазе. Комплексная амплитуда и гармоническая функция времени, при известной частоте ω, связаны взаимнооднозначно, т. е.
называют комплексной амплитудой гармонического сигнала, а е j ω t – множитель вращения. Комплексная амплитуда содержит информацию о двух важнейших параметрах гармонического сигнала – об амплитуде и о начальной фазе. Комплексная амплитуда и гармоническая функция времени, при известной частоте ω, связаны взаимнооднозначно, т. е.
 .
.
Например: гармоническому колебанию u(t)=256cos(2π100t — 45 0 ) соответствует комплексная амплитуда — Ùm = 256e — j 45 , справедливо и обратное.
3) Векторное представление сигнала – это представление сигнала вектором на комплексной плоскости. Рассмотрим векторное представление следующих сигналов:
а) комплексное гармоническое колебание — гармонический комплекс:

где e jωt – множитель вращения.
На комплексной плоскости гармонический комплекс представляется вектором Аm c начальной фазой -φ0, который вращается против часовой стрелки с частотой ω.
б) гармоническое колебание s(t) = Amcos(ωt- φ0)= Re<Àme j ωt >.
На комплексной плоскости гармоническое колебание представляется проекцией вращающегося с частотой ω против часовой стрелки вектора гармонического комплекса на реальную ось.
в) Комплексная амплитуда  . На комплексной плоскости она представляется в виде неподвижного вектора с амплитудой Am и начальной фазой -0.
. На комплексной плоскости она представляется в виде неподвижного вектора с амплитудой Am и начальной фазой -0.
Спектральное представление сигнала.
Операторное представление сигнала.
Два последних способа описания сигнала рассмотрим подробнее.
Тут вы можете оставить комментарий к выбранному абзацу или сообщить об ошибке.
Источник



