
- Искусственные механические характеристики асинхронного двигателя
- Различают естественные и искусственные механические характеристики электродвигателей
- ИСКУССТВЕННЫЕ МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ АСИНХРОННОГО ДВИГАТЕЛЯ
- АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД В ПРОКАТНОМ ПРОИЗВОДСТВЕ
- ЧАСТОТНЫЕ МЕТОДЫ АНАЛИЗА
- ОСОБЕННОСТИ ПЕРЕХОДНЫХ РЕЖИМОВ
- ТИРИСТОРНЫЕ ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ ДЛЯ РЕГУЛИРОВАНИЯ СКОРОСТИ ВРАЩЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ
- Продажа шагающий экскаватор 20/90
- Искусственные механические характеристики асинхронного двигателя
- Задача №4
- Искусственная механическая характеристика — двигатель
Искусственные механические характеристики асинхронного двигателя
Искусственные характеристики асинхронного двигателя получают за счет изменение питающего напряжения, питающей частоты, введения в цепь статора и ротора добавочных сопротивлений.
И скусственные механические характеристики, получаемые при изменении питающего напряжения. Для построения рабочей вeтви искусственной механической характеристик рассмотрим две точки. Первая 1 точка соответствует синхронной угловой скорости вторая 2 — максимальному (критическому) моменту (рис. 1).
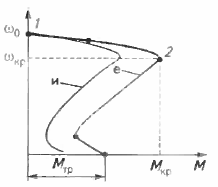
Рис. 1. Механические характеристики асинхронного двигателя при изменении напряжения сети: е — естественная характеристика при номинальном напряжении сети ( U ном), и — искусственная характеристика при пониженном напряжении сети ( U факт = 0,9 U ном) ; ωо — синхронная угловая скорость ; Мтр, Мкр — момент трогания и и критический момент двигателя соответственно.
Синхронная угловая скорость асинхронного двигателя равна:
Как видно из этой формулы, синхронная угловая скорость от напряжения не зависит. Следовательно, ее расположение на ocи ординат не изменяется. Вторая точка имеет координаты: момент критический и угловая скорость критическая. Критическая угловая скорость от напряжения не зависит, а критический момент пропорционален квадрату фактического напряжения, т. е. Мкр — U 2 факт.
Например, при уменьшении напряжения сети на 10% фактическое напряжение составит 90% или U факт= 0,9Uном. Поэтому момент критический на искусственной характеристике пропорционален
Для нахождения Мкр.иск составим пропорцию:
Мкр.иск = Мкр.ест. х (0,81 U 2 факт/ U 2 ном) = 0,81Мкр.ест.
На графике (см. рис. 1) откладываем точку, соответствующую 81% от Мкр.ест. и строим искусственную механическую характеристику.
Искусственные механические характеристики, получаемые при введении в цепь ротора асинхронного двигателя с фазным ротором добавочного сопротивления ( R до6).
Для построения искусственной механической характеристики рассмотрим две точки (рис. 2 ).
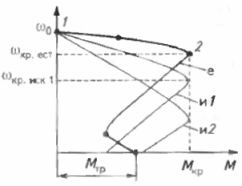
Рис. 2. Механические характеристики асинхронного двигателя при введении в цепь ротора добавочного сопротивления: е — расчетная естественная характеристика при Rдоб = 0; и 1 — искусственная характеристика при R доб1 не равном 0; и2 — искусственная характеристика при Rдоб 2 > Rдоб 1 ; ωкр. ест — критическая угловая скорость естественной характеристики; ωкр. иск — критическая угловая скорость искусственной характеристики; М; тр , Мкр момент трогания и критический момент двигателя соответственно.
Синхронную угловую скорость (первая точка 1 ) определяют по формуле ωо = 2π f/p . О на не зависит от добавочного сопротивления. Следовательно, первая точка остается на месте. Вторая точка 2 имеет координаты: момент критический и скорость критическая.
Критическая скорость обратно пропорциональна добавочному сопротивлению, а критический момент не зависит от добавочного сопротивления
Механические характеристики для этого режима представлены на рисунке 2. Искусственные механические характеристики, получаемые при изменении частоты питающего напряжения. Для построения искусственной механической характеристики рассмотрим две точки (рис. 3).
Синхронную угловую скорость (первая точка) определяют по формуле ωо = 2π f/p . Она прямопропорционально зависит от частоты питающего напряжения. Следовательно, первая точка будет сдвигаться по оси ординат.
Вторая точка имеет координаты: момент критический и скорость критическая. Критическая скорость прямо пропорциональна частоте питающего напряжения, а критический момент прямо пропорционален квадрату частоты питающего напряжения.
На рисунке 3 приведена естественная и искусственная механические характеристики асинхронного двигателя при уменьшении частоты питающего напряжения.
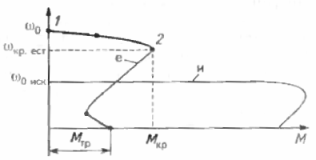
Рис. 3. Механические характеристики асинхронного двигателя при уменьшении питающей частоты: е — естественная характеристика при f ест 50 Гц, и — искусственная характеристика при f иск при 0 ,5 f ест; ωо — синхронная угловая скорость естественной характеристики; ωоиск — синхронная угловая скорость искусственной характеристики; ωкрест — критическая угловая скорость естественной характеристики; Мтр, Мкр — момент трогания и критический момент двигателя соответственно.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Различают естественные и искусственные механические характеристики электродвигателей




![]()
![]()
Естественная механическая характеристика асинхронного двигателя
Естественная механическая характеристика двигателя постоянного тока последовательного возбуждения
Естественная механическая характеристика двигателя постоянного тока параллельного возбуждения
Естественные и искусственные механические характеристики электродвигателей
ПЛАН ЛЕКЦИИ
Механические характеристики электродвигателей
ТЕМА ЛЕКЦИИ 10
2. Жесткостьмеханических характеристик
6. Механическая характеристика синхронного двигателя.Область применения синхронных двигателей на судах
Механической характеристикой двигателя, независимо от рода тока, называют зависимость угловой скорости вала электродвигателя ω (далее – двигателя) от электромагнитного момента двигателя , т.е зависимость ω ( ).
Здесь следует сделать важное замечание: в соответствии с уравнением моментов, в установившемся режиме = , электромагнитный момент двигателя уравновешивается статическим моментом (моментом сопротивления) механизма. Это означает, что величина электромагнитного момента двигателя полностью зависит от момента механизма – чем больше тормозной момент механизма, тем больше вращающий момент двигателя, и наоборот.
То есть, для любого двигателя входной величиной является момент механизма, а выходной – его скорость.
Скорость почти всех электродвигателей является убывающей функцей момента двигателя, то есть с увеличением момента скорость уменьшается [чил 33]. Но степень изменения скорости у разных электродвигателей различна и характерезуется параметром жесткость механические характеристик.
Жёсткость механические характеристик электропривода β – это отношение разности электромагнитных моментов двигателя при разных скоростях к соответствующуй разности угловых скоростей электропривода.
Обычно на рабочих участках механические характеристикиэлектродвигателей имеют отрицательную жёсткость β
Каждый электродвигатель имеет одну естественную и множество искусственных характеристик. Число искусственных характеристик зависит от числа ступеней регулирующего элемента, например, числа ступеней регулировочного реостата в цепи обмотки якоря двигателя постоянного тока. Если у двигателя таких ступеней – пять, то такой двигатель имеет шесть характеристик – пять искусственных и одну естественную.
Искусственные механические характеристики применяются для получения таких режимов работы двигателя, как регулирование скорости, реверс, электрическое торможение, и др.
Рассмотрим естественные механические характеристики двигателей разных типов.
Рис. 10.1 Естественная механическая (а) и угловая (б) характеристики синхронного двигателя; θ – угол отставания оси ротора от оси магнитного поля обмотки статора
Источник
ИСКУССТВЕННЫЕ МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ АСИНХРОННОГО ДВИГАТЕЛЯ
Получение искусственных характеристик в асинхронном двигателе возможно за счет введения добавочного сопротивления в цепь ротора (у двигателей с контактными кольцами), изменения
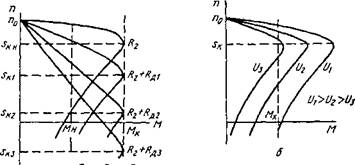
Рис 27 Искусственные механические характеристики асинхронного двигателя, полученные
а — введением дополнительного сопротивления в цепь ротора, б — изменением напряжения, питающего статор
величины и частоты напряжения, питающего статор. Включение добавочного сопротивления Ял в каждую фазу ротора в соответствии с уравнениями (11.83), (11.84) и (II.65) приводит к увеличению
критического скольжения sKl,= > а величину максималь-
ного момента Мк и синхронную скорость не изменяет (рис. 27, а). 60
Изменение величины напряжения f/ф, как видно из тех же формул, приводит к изменению максимального момента Мк1 — з и2
‘ + Х’У а величинУ критического скольжения и синхронную
скорость не изменяет (рис 27, б) При этом, как следует из уравнения механической характеристики (II 82), при изменении напряжения сети для двух значений напряжений знаменатель уравнения не изменяется и новая характеристика может быть получена из естественной, если абсциссы последней пересчитать в отношении квадратов напряжений.
Такой расчет справедлив только для небольших изменений напряжения, так как при выводе уравнения не учитывалось изменение силы тока холостого хода При напряжениях, больших номинального, резко возрастает сила тока холостого хода, увеличивается насыщение и растет нагрев стали, почему практически повышение напряжения не применяют
Большое снижение напряжения приводит к резкому уменьшению максимального момента, так как последний пропорционален квадрату напряжения. Изменение частоты питающего напряжения, как видно из тех же формул, приводит к изменению синхронной скорости вращения, максимального момента и критического скольжения. Механические характеристики для этого случая рассмотрены в гл III.
АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД В ПРОКАТНОМ ПРОИЗВОДСТВЕ
ЧАСТОТНЫЕ МЕТОДЫ АНАЛИЗА
■Ч- В случае подачи на вход разомкнутой одноконтурной системы гармонического колебания синусоидального типа с угловой частотой ш (для удобства синусоидальную функцию, изображаемую на комплексной плоскости вектором, заменяют показательной функцией с …
ОСОБЕННОСТИ ПЕРЕХОДНЫХ РЕЖИМОВ
В замкнутых системах автоматического управления под действием различных возмущений возникает переходный процесс, характеризующий переход системы из одного установившегося состояния к другому. Характер переходного процесса зависит от свойств и характеристик системы, …
ТИРИСТОРНЫЕ ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ ДЛЯ РЕГУЛИРОВАНИЯ СКОРОСТИ ВРАЩЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ
Электромашинные преобразователи частоты включают вращающиеся электрические машины, имеют механический метод управления частотой, громоздки в своем исполнении. Развитие силовой полупроводниковой техники привело к созданию регулируемых электроприводов переменного тока, получающих питание от …
Продажа шагающий экскаватор 20/90
Цена договорная
Используются в горнодобывающей промышленности при добыче полезных ископаемых (уголь, сланцы, руды черных и
цветных металлов, золото, сырье для химической промышленности, огнеупоров и др.) открытым способом. Их назначение – вскрышные работы с укладкой породы в выработанное пространство или на борт карьера. Экскаваторы способны
перемещать горную массу на большие расстояния. При разработке пород повышенной прочности требуется частичное или
сплошное рыхление взрыванием.
Вместимость ковша, м3 20
Длина стрелы, м 90
Угол наклона стрелы, град 32
Концевая нагрузка (max.) тс 63
Продолжительность рабочего цикла (грунт первой категории), с 60
Высота выгрузки, м 38,5
Глубина копания, м 42,5
Радиус выгрузки, м 83
Просвет под задней частью платформы, м 1,61
Диаметр опорной базы, м 14,5
Удельное давление на грунт при работе и передвижении, МПа 0,105/0,24
Размеры башмака (длина и ширина), м 13 х 2,5
Рабочая масса, т 1690
Мощность механизма подъема, кВт 2х1120
Мощность механизма поворота, кВт 4х250
Мощность механизма тяги, кВт 2х1120
Мощность механизма хода, кВт 2х400
Мощность сетевого двигателя, кВ 2х1600
Напряжение питающей сети, кВ 6
Более детальную информацию можете получить по телефону (063)0416788
Источник
Искусственные механические характеристики асинхронного двигателя
Задача №4
Регулирование частоты вращения двигателя независимого возбуждения в
системе Г-Д (привести схему).
Система
«генератор — двигатель».
В этой
системе, схема которой показана на рисунке 1, а, якорь 4
двигателя непосредственно присоединяется к якорю 3 генератора,
образующего вместе с при водным двигателем 1 электромашинный
выпрямитель 2 трехфазного переменного тока в постоянный,
вращающийся со скоростью ωг. Регулирование напряжения
на якоре двигателя происходит за счет изменения тока возбуждения
генератора 1вг с помощью потенциометра
8, при этом изменяется ЭДС генератора Е и соответственно напряжение
на якоре двигателя U. Регулирование
напряжения в этой системе может сочетаться с воздействием на
магнитный поток двигателя, что обеспечит двухзонное регулирование скорости.










Регулирование
магнитного потока двигателя осуществляется изменением Iвд за счет включения в цепь обмотки 5 возбуждения
двигателя резистора б. В замкнутых ЭП питание обмотки 7 возбуждения
генератора происходит от регулируемого источника постоянного тока, например
полупроводникового УВ. Характеристики системы Г — Д соответствуют
приведенным на рисунке 1, б.
Основными
достоинствами системы Г — Д являются большой диапазон и плавность
регулирования скорости двигателя, высокая жесткость и линейность характеристик,
возможность получения всех энергетических
режимов работы, в том числе и рекуперативного торможения. В то же время
для нее характерны такие недостатки, как утроенная
установленная мощность системы, низкий КПД, инерционность процесса
регулирования скорости, шум при работе.
Искусственная механическая характеристика — двигатель
Искусственная механическая характеристика двигателя показана на рис. 14.8 пунктирной линией.
| Механические характеристики двигателей. |
Различают естественные и искусственные механические характеристики двигателя . Под естественной понимают характеристику, которую имеет двигатель, подключенный без дополнительных сопротивлений к сети с напряжением, равным номинальному напряжению двигателя. При переменном токе, кроме того, частота сети должна быть равна номинальной частоте двигателя. Все другие механические характеристики ( при включении в схему добавочных сопротивлений, при напряжении или частоте, отличающихся от номинальных) называют искусственными.










Жесткость искусственных механических характеристик двигателей постоянного и переменного токов отличается от жесткости естественных характеристик и зависит от способа регулирования скорости. Это существенно влияет на стабильность скорости при работе привода с переменной нагрузкой.
Естественная или искусственная механическая характеристика двигателя может быть построена по двум точкам.
Точный расчет искусственных механических характеристик двигателя в установившемся режиме является сложной и по существу невыполнимой задачей.
Эта зависимость дает возможность построить искусственные механические характеристики двигателя . По естественной характеристике строится пограничная ngf ( t), а по формуле ( 13) и пограничной характеристике — любая искусственная.










Полагаем, что естественная и искусственные механические характеристики двигателя прямолинейны.
Продолжая рассмотренный выше пример, построим искусственную механическую характеристику двигателя АК82 — 4 с магнитными усилителями УСО-20, проходящую через точку с координатами Мс.
Схема управления должна прежде всего обеспечивать требуемую жесткость искусственных механических характеристик двигателя на всем диапазоне регулирования скорости и ограничение тока якоря в переходных режимах.
| Реостатная механическая характеристика двигателя ( а. зависимость т, cos ф от нагрузки асинхронного двигателя ( б. |
По результатам расчета на рис. 10.37, а изображена искусственная механическая характеристика двигателя .










Хотя полной компенсации изменения скорости вращения двигателя 8Д, вызванного изменением нагрузки на валу, при таком способе стабилизации не происходит, все же жесткость искусственной механической характеристики двигателя 8Д существенно возрастает, а отклонения скорости относительно установившегося значения соответственно значительно снижается.
| Схема электропривода ( вариант Л 3. |
Тот же эффект может быть получен, если использовать две обмотки управления и, снимая напряжение с шунта в цепи якоря двигателя, создать дополнительную положительную обратную связь по току якоря, увеличивающую жесткость искусственных механических характеристик двигателя .
Источник



