
Незатухающие колебания и параметрический резонанс
Незатухающие колебания — колебания, энергия которых с течением времени не изменяется. В реальных физических системах всегда существуют причины, вызывающие переход энергии колебаний в тепловую (например, трение в механических системах, активное сопротивление в электрических системах).
Поэтому незатухающие колебания можно получить только при условии, что эти потери энергии восполняются. Такое восполнение автоматически осуществляется в автоколебательных системах за счет энергии из внешнего источника. Электромагнитные незатухающие колебания используются чрезвычайно широко. Для их получения применяются различные генераторы.

Чтобы сделать электрические или механические колебания (колебательного контура или маятника) незатухающими, необходимо все время компенсировать потери на сопротивление или на трение.
Можно, например, воздействовать на колебательный контур переменной ЭДС, которая будет периодически увеличивать ток в катушке, и соответственно поддерживать амплитуду напряжения на конденсаторе. Или можно подталкивать маятник, аналогичным путем поддерживая его гармоническое качание.
Как известно, величина энергии магнитного поля катушки колебательного контура связана с ее индуктивностью и током следующим соотношением (вторая формула — энергия электрического поля конденсатора того же кобательного контура)

Из первой формулы ясно, что если мы будем периодически увеличивать ток в катушке, воздействуя на контур переменной ЭДС, то (увеличивая или уменьшая второй сомножитель в формуле — ток) станем периодически пополнять тот контур энергией.
Действуя на контур строго в такт его собственным свободным колебаниям, то есть на резонансной частоте, — получим явление электрического резонанса, ведь именно на резонансной частоте колебательная система интенсивне всего поглощает подводимую к ней энергию.
А что, если периодически изменять не второй сомножитель (не ток или напряжение), а первый, — индуктивность или емкость? В этом случае контур тоже испытает изменение своей энергии.
Например, периодически вдвигая и выдвигая сердечник из катушки, или вдвигая и выдвигая из конденсатора диэлектрик, — тоже получим вполне определенное периодическое изменение энергии в контуре.
Запишем это положение для единичного изменения индуктивности катушки:
Наиболее выразительным эффект раскачки контура получится в том случае, если изменения индуктивности осуществлять точно вовремя. Например, если взять все тот же контур в произвольный момент времени, когда по нему уже течет какой-то ток i, и внести в катушку сердечник, то энергия изменится на такую величину:

Теперь пусть свободные колебания происходят в контуре сами, но в момент времени, когда через четверть периода энергия полностью перешла в конденсатор и ток в катушке обратился в ноль, резко вынем сердечник из катушки. Индуктивность вернется к своему исходному состоянию, к первоначальной величине L. Работы против магнитного поля при выдвигании сердечника затрачивать не придется. Следовательно при вдвигании сердечника в катушку, контур получил энергию, ибо мы совершили работу, величина которой:

Через четверть периода конденсатор начинает разряжаться, его энергия снова переходит в энергию магнитного поля катушки. Когда магнитное поле достигнет амплитуды — снова резко вдвинем сердечник. Опять индуктивность увеличилась, приросла на ту же величину.
И вновь при нулевом токе возвращаем индуктивность к исходному значению. В итоге, если приросты энергии за каждые полпериода превосходят потери на сопротивление, энергия контура будет все время возрастать, амплитуда колебаний станет увеличиваться. Это положение выражается неравенством:

Здесь мы разделили обе части этого неравенства на L, и записали условие возможности параметрического возбуждения скачками для определенной величины логарифмического декремента.
Изменять индуктивность (или емкость) целесообразно два раза за период, следовательно частота изменения параметра (частота параметрического резонанса) должна быть вдвое выше собственной частоты колебательной системы:

Вот и вырисовался путь возбуждения колебаний в контуре без необходимости изменять непосредственно ЭДС или ток. Начальный флуктуационный ток в контуре так или иначе всегда присутствует, и это даже не принимая во внимание наводки от радиочастотных колебаний в атмосфере.
Если индуктивность (или емкость) будут изменяться не скачками а гармонически, то условие возникновения колебаний станет выглядеть несколько иначе:

Так как емкость и индуктивность — это параметры контура (как масса маятника или упругость пружины), то и способ возбуждения колебаний получил называние параметрического возбуждения.
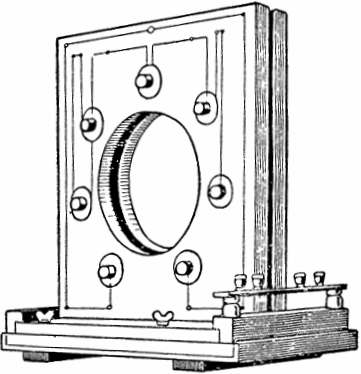
Данное явление открыли и изучали на практике в начале 20 века советские физики Мандельштам и Папалекси. На основе данного физического явления они построили первый параметрический генератор переменного тока мощностью 4 кВт на изменяющейся индуктивности.
В конструкции генератора семь пар плоских катушек располагались по две стороны на каркасе, в полости которого вращался ферромагнитный диск с выступами. Когда диск приводился во вращение мотором, его выступы периодически входили в пространство между каждой парой катушек, и выходили из него, тем самым изменяя индуктивность и возбуждая колебания.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Метод незатухающих колебаний




![]()
![]()
В работающей системе выключаются интегральная и дифференциальная составляющие регулятора (Tи = ∞, Tд = 0), т.е. система переводится в П-закон регулирования. Путем последовательного увеличения Kp с одновременной подачей небольшого скачкообразного сигнала задания добиваются возникновения в системе незатухающих колебаний с периодом Kkp. Это соответствует выведению системы на границу колебательной устойчивости. При возникновении данного режима работы фиксируются значения критического коэффициента усиления регулятора Kkp и периода критических колебаний в системе Tkp. При появлении критических колебаний ни одна переменная системы не должна выходить на уровень ограничения. По значениям Kkp и Tkp рассчитываются параметры настройки регулятора:
Расчет настроек регулятора можно производить по критической частоте собственно объекта управления ωkp. Учитывая, что собственная частота ωkp объекта управления совпадает с критической частотой колебаний замкнутой системы с П-регулятором, величины Kkp и Tkp могут быть определены по амплитуде и периоду критических колебаний собственно объекта управления.
При выведении замкнутой системы на границу колебательной устойчивости амплитуда колебаний может превысить допустимое значение, что в свою очередь приведет к возникновению аварийной ситуации на объекте или к выпуску бракованной продукции. Поэтому не все системы управления промышленными объектами могут выводиться на критический режим работы.
^ 3.4.2 Метод затухающих колебаний
Применение этого метода позволяет настраивать регуляторы без выведения системы на критические режимы работы. Так же, как и в предыдущем методе, для замкнутой системы с П-регулятором, путем последовательного увеличения Kp добиваются переходного процесса отработки прямоугольного импульса по сигналу задания или возмущения с декрементом затухания D = 1/4.
Далее определяется период этих колебаний Tк и значения постоянных интегрирования и дифференцирования регуляторов Tи и Tд
После установки вычисленных значений Tи и Tд на регуляторе необходимо экспериментально уточнить величину Kp для получения декремента затухания D = 1/4. С этой целью производится дополнительная подстройка Kp для выбранного закона регулирования, что обычно приводит к уменьшению Kp на 20 ÷ 30%. Аналогичный метод настройки используется в адаптивных регуляторах американской фирмы «Фоксборо».
Большинство промышленных систем регулирования считаются качественно настроенными, если их декремент затухания D равен 1/4 или 1/5.
В настоящее время разработан новый метод настройки замкнутых систем управления, основанный на подаче пробных синусоидальных колебаний на вход регулятора. По амплитуде и фазе колебаний выходного сигнала объекта управления осуществляется расчет настроек ПИ-регулятора, исходя из условия обеспечения заданного показателя колебательности M и максимума отношения Kp / Tи.
15. Регулирование объектов с запаздыванием. Регулятор Смита.
Источник
Метод незатухающих колебаний
Этот метод позволяет определить настройки регулятора, обеспечивающие определенный запас устойчивости АСР и удовлетворительное качество переходных процессов. Определение настроек регулятора производиться в два этапа:
определяется критическая частота  и критическая настройка Кр кр пропорционального регулятора, при которой в замкнутой АСР возникают затухающие колебания у(t);
и критическая настройка Кр кр пропорционального регулятора, при которой в замкнутой АСР возникают затухающие колебания у(t);
определение по Кр кр настроек регуляторов по приближенным формулам.
Определение критической частоты и настройки Кр кр
Если разомкнутая система устойчивая и ее АФХ проходит через точку  , то замкнутая АСР будет находиться на границе устойчивости.
, то замкнутая АСР будет находиться на границе устойчивости.
Условие нахождения АСР на границе устойчивости:


это условие выполняется, если:

Амплитудно-фазовая характеристика пропорционального регулятора имеет вид:

или в показательной форме:

для расчета настройки Кр кр и частоты  получим два уравнения:
получим два уравнения:

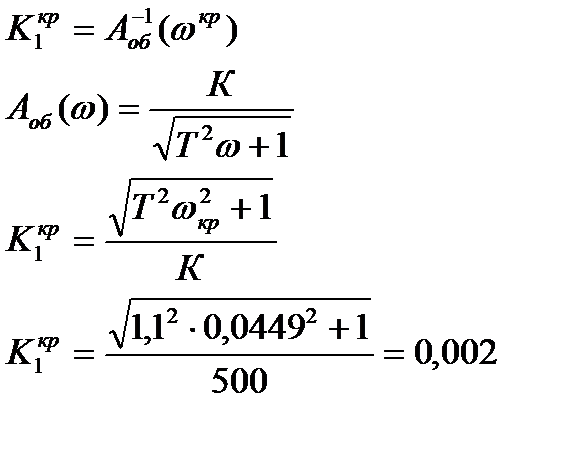
Из второго уравнения находим значение , затем из первого Кр кр по формуле:

Определение настроек регуляторов
По критическим значениям Кр кр и  определяем настройки регуляторов
определяем настройки регуляторов
Пропорциональный (П) регулятор:

Пропорционально-дифференциальный (ПД) регулятор:


где,  — период незатухающих колебаний АСР
— период незатухающих колебаний АСР
Пропорционально-интегрально-дифференциальный (ПИД) регулятор:

 ;
;
 ;
;

Вычисление настройки регуляторов, обеспечивают степень затухания процесса регулирования  более чем 0,75.
более чем 0,75.
На производстве достаточно часто находят настройки П,ПИ,ПИД – регуляторов по приближенным формулам, зависящем от некоторых характерных параметров динамики объекта:
— времени запаздывания  ;
;
— постоянной времени Т0 ;
— коэффициента усиления К0 .
Пропорциональный (П) регулятор:

Пропорционально дифференциальный (ПД) регулятор:
 ;
; 
Пропорционально-интегрально-дифференциальный (ПИД) регулятор:
 ;
;  ;
; 
Найденные настройки обеспечивают устойчивый переходной процесс со степенью затухания
Пример:
Определить критическую частоту  и настройки
и настройки  . (Рис.1.1.).
. (Рис.1.1.).
Поскольку АФХ П-регулятора имеет вид  , то для расчета настройки
, то для расчета настройки  и частоты
и частоты  получим два уравнения:
получим два уравнения:
Из второго уравнения находиться значение

Решая последнее уравнение, находим =0,0449, затем из первого по формуле:
Определяем настройки регуляторов. Расчет настроек регуляторов по  и
и  осуществляется по приближенным формулам:
осуществляется по приближенным формулам:
П-регулятор 

Расчет настроек по амплитудно-фазовой характеристики объекта
При использовании метода определения настройки регулятора по АФХ объекта необходимо обеспечить выполнение установленных требований к расположению характеристики на комплексной плоскости, обусловленных заданными значениями показателя колебательности М, запасов устойчивости по модулю С и фазе  р, времени регулирования tр. При отсутствии наперед заданных значений какого-либо из показателей качества следует принимать М = 1,3—1,5, что обеспечит хорошее качество переходных процессов в замкнутой системе регулирования.
р, времени регулирования tр. При отсутствии наперед заданных значений какого-либо из показателей качества следует принимать М = 1,3—1,5, что обеспечит хорошее качество переходных процессов в замкнутой системе регулирования.
Настройка П-регулятора.
Построить АФХ разомкнутой системы с регулятором при k1== 1, совпадающую с АФХ объекта, и провести луч под углом  (1/М) к отрицательной полуоси (Рис.1.6.)
(1/М) к отрицательной полуоси (Рис.1.6.)
Вычертить окружность радиуса r с центром на вещественной отрицательной полуоси, касающуюся АФХ объекта и луча.
Рассчитать максимальное значение коэффициента усиления П-регулятора по формуле:
 (1)
(1)
Настройка И-регулятора.
Построить АФХ разомкнутой системы для некоторого фиксированного значения, постоянной времени Т1 интегрального регулятора и k1 = 1 в выражении для его коэффициента усиления kа == k1/T1 , что сведется к повороту по часовой стрелке на 90° векторов АФХ объекта, уменьшенных в T1  раз (Рис.1.7.)
раз (Рис.1.7.)
Провести луч под углом  и определить радиус r окружности, касающейся луча и построенной АФХ разомкнутой системы.
и определить радиус r окружности, касающейся луча и построенной АФХ разомкнутой системы.
Рассчитать оптимальное предельное значение коэффициента усиления интегрального регулятора:
 (2)
(2)


Настройка ПИ-регулятора.
Построить АФХ разомкнутой системы для нескольких фиксированных значений Ти по выражению

при kp=1, что сведется к повороту на 90° в отрицательном направлении измененного в  ТИ раз вектора АФХ объекта и геометрическому суммированию его с исходным, как показано на (Рис1.8.).
ТИ раз вектора АФХ объекта и геометрическому суммированию его с исходным, как показано на (Рис1.8.).
Провести луч под углом  (1/М) и определить радиусы окружностей, касающихся этого луча и АФХ с фиксированными значениями ТИ.
(1/М) и определить радиусы окружностей, касающихся этого луча и АФХ с фиксированными значениями ТИ.
Определить значения коэффициентов усиления регулятора для каждого ТИ, так же, как и для П-регулятора, т. е. по формуле (1).
Построить кривую границы области устойчивости (при заданном М) в плоскости параметров настройки ПИ-регулятора kp и ТИ (Рис.1.8.). Проведя касательную к этой кривой, можно выявить точку максимального отношения kp/TИ, являющегося оптимумом настройки.
Настройка ПИД-регулятора.
Характеристики для различных значений ТИ, при единичном значении kp строится для фиксированного оптимального отношения времени предварения к времени изодрома Тп/Ти  0,5. Выражение для АФХ системы представится в таком виде:
0,5. Выражение для АФХ системы представится в таком виде:

При этом построение сведется к повороту на 90° в отрицательном направлении измененных в (1/ТИ -0,5 ТИ ) раз векторов АФХ объекта и геометрическому суммированию
их с исходными векторами (Рис.1.9).
Провести луч под углом  (1/М) и определить радиусы окружностей, касающихся этого луча и АФХ с фиксированными значениями ТИ.
(1/М) и определить радиусы окружностей, касающихся этого луча и АФХ с фиксированными значениями ТИ.
Определить значения коэффициентов усиления регулятора для каждого ТИ, так же, как и для П-регулятора, т. е. по формуле (1).
Построить кривую границы области устойчивости (при заданном М) в плоскости параметров настройки ПИ-регулятора kp и ТИ (Рис.1.8.). Проведя касательную к этой кривой, можно выявить точку максимального отношения kp/TИ, являющегося оптимумом настройки.

Пример: Математически определяем объект регулирования, получается модель объекта, Рис.1.6. которая описывается апериодическим звеном первого порядка с передаточной функцией первого порядка:
р заменим на 

числитель и знаменатель умножаем на знаменатель сопряженный:

Выделяем действительную и мнимую часть, строим АФХ
 и
и 
Подставляя значения от 0 до  строим АФХ разомкнутой системы с К1=1 для фиксированных значений Тu (в нашем случае Тu=1,1). Для этого вектор АФХ замкнутой системы изменяем в Тu раз, поворачиваем на 90 0 в отрицательном направлении
строим АФХ разомкнутой системы с К1=1 для фиксированных значений Тu (в нашем случае Тu=1,1). Для этого вектор АФХ замкнутой системы изменяем в Тu раз, поворачиваем на 90 0 в отрицательном направлении
(  , где Х – длина вектора замкнутой АФХ) и геометрически суммируем его с исходным.
, где Х – длина вектора замкнутой АФХ) и геометрически суммируем его с исходным.
Проводим луч под углом

 отрицательной полуоси.
отрицательной полуоси.
Вычерчиваем окружность радиуса r с центра на вещественной отрицательной полуоси, касающуюся АФХ разомкнутой системы и луча.
| | Тu=1,1 | ||
 |  | Х | |
| 0,1 | 506,03 | -57,05 | 55,24878 |
| 0,2 | 48,88 | -115,36 | 95,82775 |
| 0,3 | 478,68 | -170,39 | 117,2624 |
| 0,4 | 447,54 | -218,13 | 127,4889 |
| 0,5 | 408,90 | -256,01 | 132,4419 |
| 0,6 | 366,53 | -283,22 | 134,9411 |
| 0,8 | 282,98 | -309,15 | 136,928 |
| 212,27 | -308,49 | 137,4422 | |
| 2,1 | 43,89 | -207,15 | 136,7909 |
| 2,5 | 25,42 | -178,19 | 136,5044 |
| 12,35 | -150,50 | 136,2153 | |
| 0,71 | -113,63 | 135,8047 | |
| -3,56 | -90,77 | 135,5327 | |
| -5,97 | -49,79 | 135,0029 | |
| -3,25 | -17,58 | 134,5377 | |
| -1,14 | -5,44 | 134,3482 | |
| -0,47 | -2,17 | 134,2957 | |
| -0,10 | -0,43 | 134,2674 |
Рассчитываем максимальное значение коэффициента усиления ПИ-регулятора по формуле:
Источник



