
- Возбуждение двигателя постоянного тока. Схемы возбуждения.
- Способы возбуждения машин постоянного тока и их классификация
- Последовательное, параллельное и смешанное возбуждение в двигателях постоянного тока Электродвигатель постоянного тока работает от источников постоянного тока. В электродвигателе происходит превращение электрической энергии в механическую. Электрический двигатель постоянного тока состоит из ротора (якоря) и статора (индуктора, магнита, обмотки возбуждения). Статор может быть либо постоянным магнитом, либо электромагнитом. Якорь во многих электродвигателях представляет собой проволочные петли, надетые на сердечник из мягкого железа, на котором реверсируется питание его обмотки (посредством коммутатора или управляющей электронной схемы). Большинство двигателей, работающих на постоянном токе, имеют коммутатор, состоящий из коллектора и щеток. Щетки установлены на статоре и не вращаются, а коллектор соединен с катушкой установленной на роторе (якоре). Современные бесколлекторные двигатели (или бесщеточные двигатели, BLDC) имеют якорь из постоянных магнитов и не имеют коллектора и щеток, а работают со специальной электронной схемой. Якорь двигателя двигателя постоянного тока имеет очень низкое сопротивление. По этой причине при запуске двигателя последовательно с ним включается переменное сопротивление, которое выводится по мере того, как якорь набирает скорость. Когда проводник с током вносится в магнитное поле, на него начинает действовать сила, зависящая от трех факторов: от напряженности поля, от величины тока и от длины проводника. Сила, приводящая во вращение якорь электродвигателя, зависит от тех же трех факторов. При этом эффективная длина обмотки приблизительно равна удвоенной длине якоря, умноженной на число витков. Двигатель постоянного тока в разобранном виде Электромагнит двигателя постоянного тока можно возбудить тремя различными способами, и в каждом из этих способов возбуждения двигатель работает по-разному. Обмотка электромагнита и якорь могут быть соединены тремя способами: последовательно (сериесное возбуждение), параллельно (шунтовое возбуждение) и смешанно (компаунд-возбуждение). В электродвигателе постоянного тока с последовательным возбуждением весь ток проходит как через якорь, так и через обмотку электромагнита. Следовательно, вращающий момент, действующий на якорь, изменяется пропорционально квадрату тока, поскольку крутящее усилие зависит от тока в якоре и от напряженности магнитного поля, которая линейно меняется в зависимости от тока в обмотке электромагнита. В результате, когда действие большой нагрузки замедляет вращение якоря двигателя с последовательным возбуждением, так что обратная э. д. с. становится малой, то через якорь и обмотку электромагнита идет сильный ток, создающий значительную силу для вращения якоря. Двигатели постоянного тока с последовательным возбуждением используются в трамваях, электровозах, автомобильных стартерах и в других машинах, которые работают в условиях быстро прикладываемых значительных нагрузок. Обычно такие двигатели соединяются с приводимыми в движение машинами с помощью шестереночных, а не ременных передач, поскольку если при работе двигателя нагрузка на него резко снижается, то двигатель разгоняется до опасной скорости (они не имеют ограничения скорости) . На холостом ходу двигатель может работать на высоких оборотах, когда существует риск механического разрыва ротора с возможным травмированием оператора. Современные технологии с преобразователем частоты позволяют полностью и в равной степени заменить такие двигатели на трехфазные асинхронные двигатели, а в последних разработках — на трехфазные синхронные двигатели с постоянными магнитами на роторе. Обладая такой же мощностью и такими же характеристиками крутящего момента, они меньше, легче и позволяют рекуперацию энергии, если это позволяют условия эксплуатации источника питания. Схема подключения электродвигателя В двигателя постоянного тока с параллельным возбуждением ток разветвляется, одна часть его идет через якорь, а другая — через обмотку электромагнита. При этом полный ток в обеих ветвях равен току, питающему двигатель. В результате вращающий момент якоря пропорционален первой степени тока, тогда как в двигателях с последовательным возбуждением этот момент меняется как квадрат тока. Когда якорь двигателя с параллельным возбуждением начинает вращаться медленнее при повышении нагрузки на двигатель, через якорь пойдет больший, а через обмотку электромагнита — меньший ток. В результате вращающий момент останется неизменным. Поэтому двигатель в течение всего времени, пока к нему приложена нагрузка, будет работать на скорости, пониженной по сравнению с его холостым ходом. Такое подключение двигателя позволяет независимо регулировать и определять ток в обмотке возбуждения статора и обмотке ротора (якорь). Это позволяет изменять скорость и крутящий момент двигателя. Двигатели с параллельным возбуждением непригодны для больших нагрузок. По этой причине они находят применение в таких установках, где нагрузка постоянная и где требуется постоянная скорость вращения, например электрических вентиляторах, воздуходувках, жидкостных насосах и т. п. Электродвигатели постоянного тока со смешанным возбуждением имеют две обмотки возбуждения (одну для параллельного включения, другую — для последовательного). Они не разгоняются при ослаблении нагрузки и вместе с тем пригодны для больших нагрузок. Почему это так, предоставляю объяснить читателю и поделиться своими идеями в комментарии к статье. Двигатели этого типа применяются в подъемниках, штамповочных прессах и других машинах, где в начальный момент работы машины необходимы значительные усилия. Последовательное возбуждение во многих случаях выключается после набора двигателем определенной скорости. Вопрос. Какого вида возбуждения двигатель постоянного тока показан на фотографии в статье? Источник Управление возбуждением двигателей постоянного тока Управление двигателями постоянного тока По способу возбуждения двигатели постоянного тока подразделяются аналогично генераторам на двигатели независимого (рис.1), параллельного (рис.2), последовательного (рис.3) и смешанного (рис.4) возбуждения. При параллельном, последовательном и смешанном возбуждении напряжение на обмотке возбуждения зависит от напряжения на обмотке якоря, при независимой системе возбуждения, обмотка возбуждения питается от дополнительного источника постоянного тока и не зависит от режима работы и нагрузки двигателя. Рис.1 Схема независимого возбуждения Рис.2 Схема параллельного возбуждения Рис.3 Схема последовательного возбуждения Рис.4 Схема смешанного возбуждения Для регулирования скорости двигателей постоянного тока применяют различные способы. В общем случае скорость двигателя определяется выражением: Как видно из выражения (1.1), регулировать скорость двигателя постоянного тока возможно двумя способами: — Изменением питающего напряжения U — Изменением магнитного потока машины Ф (изменением тока возбуждения) Раньше регулирование питающего напряжения встречало трудности связанные с преобразованием напряжения постоянного тока, изменение скорости вращения двигателя осуществлялось с помощью включения в цепь якоря дополнительного регулировочного реостата. Основными недостатками этого метода являются потери в реостате, через который протекает ток полной нагрузки двигателя, неудобство управления. Наиболее удобным, распространенным и экономичным способом регулирования скорости вращения двигателя постоянного тока, является изменение магнитного потока машины (изменение тока возбуждения). Экономия связана с тем, что в данном случае управлять можно не большим током якоря, а малым током возбуждения, что уменьшает потери и удешевляет систему управления. Однако этот способ позволяет лишь увеличивать скорость вращения двигателя. Согласно выражению (1.1), с уменьшением Ф скорость возрастает (рис.5). Двигатели рассчитываются для работы при номинальном режиме с наибольшим значением Ф, т. е. с наименьшей величиной n. При таком регулировании к. п. д. двигателя остается высоким, так как мощность возбуждения мала, и потери при регулировании минимальны. Максимальная скорость вращения в данном случае ограничивается механической прочностью машины и условиями ее коммутации. Рис.5 Характеристики ДПТ при регулировании тока возбуждения Современные способы регулирования скорости двигателей постоянного тока Сегодня основным средством управления двигателями постоянного тока становятся современные тиристорные регуляторы (назовем их “приводы постоянного тока”), их производят множество фирм, специализирующихся на приводной технике (например, Control Techniques, Siemens, Sprint-Electric и т.д.). Современные приводы постоянного тока позволяют управлять не только скоростью вращения двигателя, но и его моментом (например, на линиях намотки). За счет различных интерфейсов обмена сигналами с автоматизированной системой управления, изменять параметры работы двигателя достаточно просто и удобно. Приводы постоянного тока могут работать как в одном квадранте, так и во всех четырех, при этом изменяя не только ток обмотки якоря, но и ток обмотки возбуждения — многие приводы имеют встроенные “контроллеры поля”, что дает возможность регулировать скорость двигателя в самом широком диапазоне. Следует отметить, что “ослабление” поля при задании скорости двигателя выше номинальной, привод производит автоматически, контроллер поля представляет собой тот же тиристорный регулятор. Встроенные контроллеры поля имеют приводы Mentor, Mentor MP (Control Techniques), PL, PLX (Sprint-Electric). Остальные модели приводов постоянного тока этих брендов для питания обмотки возбуждения двигателей имеют неуправляемые выпрямители. Номинальный ток контроллеров возбуждения приводов постоянного тока имеют следующие значения: Sprint-Electric PL, PLX — 8A (для приводов с номинальным током якоря 12-123A), 16A (для приводов с номинальным током якоря 155-330A), 32A (для приводов с номинальным током якоря 430-630A). Control Techniques Mentor — M25(R) — M210(R) — 8 А, остальные габариты с неуправляемым выпрямителем. Control Techniques Mentor MP — MP25Ax(R), MP45Ax(R), MP75Ax(R), MP105Ax(R), MP155Ax(R), MP210Ax(R) — 8А MP350Ax(R), MP420Ax(R), MP550Ax(R), MP700Ax(R), MP825Ax(R), MP900Ax(R) — 10A MP1200Ax(R), MP1850Ax(R) — 20А. Для токов обмотки возбуждения имеющих значение свыше 8А, Control Techniques предлагает внешние контроллеры поля, которые связываются с приводом постоянного тока по цифровой шине — это контроллеры FXM-5 (до 90А) и FXMP-25 (до 25А). На практике часто встречаются двигатели с низковольтными обмотками возбуждения с большими токами. В данном случае, для изменения тока можно применить приводы постоянного тока, при этом вместо обмотки якоря подключить обмотку возбуждения. Это может быть любой аналоговый или цифровой привод постоянного тока. При использовании в качестве регуляторов поля простых аналоговых преобразователей Sprint-Electric (модели 340, 680, 1220, 340i, 680i, 1220i, 370, 370E, 400E, 800E, 1200E, 400, 800, 1200, 400i, 1600i, 3200i, SL, SLE), производитель рекомендует настраивать их в режим управления моментом. Привод Mentor MP (Control Techniques) имеет для этого специальный режим. Источник
- Управление возбуждением двигателей постоянного тока
Возбуждение двигателя постоянного тока. Схемы возбуждения.
Возбуждение двигателя постоянного тока является отличительной особенностью таких двигателей. От типа возбуждения зависят механические характеристики электрических машин постоянного тока. Возбуждение может быть параллельным последовательным смешанным и независимым. Тип возбуждения означает, в какой последовательности включены обмотки якоря и ротора.
При параллельном возбуждении обмотки якоря и ротора включаются параллельно друг другу к одному источнику тока. Так как у обмотки возбуждения больше витков чем у якорной то и ток в ней течет незначительный. В цепи, как обмотки ротора, так и обмотки якоря могут включаться регулировочные сопротивления.
Обмотка возбуждения может подключаться и к отдельному источнику тока. В этом случае возбуждение будет называться независимым. У такого двигателя характеристики будут схожи с двигателем, в котором применяется постоянный магнит. Скорость вращения двигателя с независимым возбуждением, как и у двигателя с параллельным возбуждением зависит от тока якоря и основного магнитного потока. Основной магнитный поток создается обмоткой ротора.
Скорость вращения можно регулировать с помощью реостата включенного в цепь якоря изменяя тем самым ток в нем. Также можно регулировать ток возбуждения, но здесь нужно быть осторожным. Так как при его чрезмерном уменьшении или полном отсутствии в результате обрыва питающего провода ток в якоре может возрасти до опасных значений.
Также при малой нагрузке на валу или в режиме холостого хода скорость вращения может настолько увеличится, что может привести к механическому разрушению двигателя.
Если обмотка возбуждения включена последовательно с якорной, то такое возбуждение называется последовательным. При этом через якорь и обмотку возбуждения протекает один и тот же ток. Таким образом, магнитный поток изменяется с изменением нагрузки двигателя. А следовательно скорость двигателя будет зависеть от нагрузки.
Двигатели с таким возбуждением нельзя запускать на холостом ходу либо с небольшой нагрузкой на вал. Их применяют в том случае если, требуется большой пусковой момент или способность выдерживать кратковременные перегрузки.
При смешанном возбуждении используются двигатели, у которых на каждом полюсе есть по две обмотки. Их можно включить так чтобы магнитные потоки как складывались, так и вычитались.
В зависимости от того как соотносятся магнитные потоки двигатель с таким возбуждением может работать как двигатель с последовательным так и двигатель с параллельным возбуждением. Все зависит от ситуации, если нужен большой стартовый момент, такая машина работает в режиме согласного включения обмоток. Если же необходима постоянная скорость вращения, при динамически изменяющейся нагрузке применяют встречное включение обмоток.
В машинах постоянного тока можно изменять направление движения ротора. Для этого необходимо изменить направление тока в одной из обмоток. Якорной либо возбуждения. Изменением полярности направление вращения двигателя можно добиться только в двигателе с независимым возбуждением, или в котором используется постоянный магнит. В других схемах включения нужно переключать одну из обмоток.
Стартовый ток в машине постоянного тока достаточно велик, поэтому ее следует запускать с добавочным реостатом, чтобы избежать повреждения обмоток.
Источник
Способы возбуждения машин постоянного тока и их классификация
 Ток, протекающий в обмотке возбуждения основных полюсов, создает магнитный поток . Электрические машины постоянного тока следует различать по способу возбуждения и схеме включения обмотки возбуждения.
Ток, протекающий в обмотке возбуждения основных полюсов, создает магнитный поток . Электрические машины постоянного тока следует различать по способу возбуждения и схеме включения обмотки возбуждения.
Генераторы постоянного тока могут выполняться с независимым, параллельным, последовательным и смешанным возбуждением. Следует заметить, что теперь применение в качестве источников энергии генераторов постоянного тока очень ограничено.
Обмотка возбуждения генератора постоянного тока с независимым возбуждением получает питание от независимого источника — сети постоянного тока, специального возбудителя , преобразователя и др. (рис. 1, а). Эти генераторы применяются в мощных системах, когда напряжение возбуждения должно быть выбрано отличным от напряжения генератора, в системах регулирования скорости вращения двигателей, которые питаются от генераторов и других источников.
Значение тока возбуждения мощных генераторов составляет 1,0—1,5% от тока генераторов и до десятков процентов для машин мощностью порядка десятков ватт.
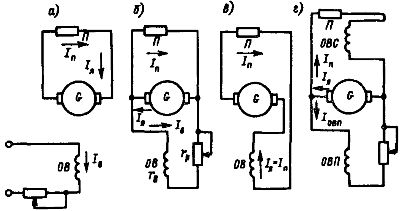
Рис. 1. Схемы генераторов постоянного тока: а — с независимым возбуждением; б — с параллельным возбуждением; в — с последовательным возбуждением; г — со смешанным возбуждением П — потребители
У г енератора с параллельным возбуждением обмотка возбуждения включается на напряжение самого генератора (смотрите рис. 1,б). Ток якоря I я равен сумме токов нагрузки I п и тока возбуждения I в: I я = I п + I в
Генераторы выполняются обычно для средних мощностей.
Обмотка возбуждения генератора с последовательным возбуждением включена последовательно в цепь якоря и обтекается током якоря (рис. 1, в). Процесс самовозбуждения генератора протекает очень бурно. Такие генераторы практически не используются. В самом начале развития энергетики применялась система передачи энергии с последовательно включенными генераторами и двигателями последовательного возбуждения.
Генератор со смешанным возбуждением имеет две обмотки возбуждения — параллельную ОВП и последовательную ОВС обычно с согласным включением (рис. 1, г). Параллельная обмотка может быть включена до последовательной («короткий шунт») или после нее («длинный шунт»). МДС последовательной обмотки обычно невелика и рассчитана только на компенсацию падения напряжения в якоре при нагрузке. Такие генераторы теперь также практически не применяются.
Схемы возбуждения двигателей постоянного тока подобны схемам для генераторов. Двигатели постоянного тока большой мощности выполняются обычно с независимым возбуждением . У двигателей параллельного возбуждения обмотка возбуждения получает питание от того же источника энергии, что и двигатель. Обмотка возбуждения включается непосредственно на напряжение источника энергии, чтобы не сказывалось влияние падения напряжения в пусковом сопротивлении (рис. 2).
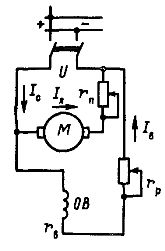
Рис. 2. Схема двигателя постоянного тока с параллельным возбуждением
Ток сети Ic составляется из тока якоря I я и тока возбуждения I в.
Схема двигателя последовательного возбуждения подобна схеме на рис. 1, в. Благодаря последовательной обмотке вращающий момент при нагрузке возрастает больше, чем у двигателей параллельного возбуждения, при этом скорость вращения уменьшается. Это свойство двигателей определяет их широкое применение в приводах электровозной тяги: в магистральных электровозах, городском транспорте и др. Падение напряжения в обмотке возбуждения при номинальном токе составляет единицы процентов от номинального напряжения.
Двигатели смешанного возбуждения из-за наличия последовательной обмотки в некоторой мере имеют свойства двигателей последовательного возбуждения. В настоящее время они практически не применяются. Двигатели параллельного возбуждения иногда выполняются со стабилизирующей (последовательной) обмоткой, включаемой согласно с параллельной обмоткой возбуждения, для обеспечения более спокойной работы при пиках нагрузки. МДС такой стабилизирующей обмотки невелика — единицы процентов от основной МДС.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Последовательное, параллельное и смешанное возбуждение в двигателях постоянного тока
Электродвигатель постоянного тока работает от источников постоянного тока. В электродвигателе происходит превращение электрической энергии в механическую.
Электрический двигатель постоянного тока состоит из ротора (якоря) и статора (индуктора, магнита, обмотки возбуждения). Статор может быть либо постоянным магнитом, либо электромагнитом.
Якорь во многих электродвигателях представляет собой проволочные петли, надетые на сердечник из мягкого железа, на котором реверсируется питание его обмотки (посредством коммутатора или управляющей электронной схемы).
Большинство двигателей, работающих на постоянном токе, имеют коммутатор, состоящий из коллектора и щеток. Щетки установлены на статоре и не вращаются, а коллектор соединен с катушкой установленной на роторе (якоре).
Современные бесколлекторные двигатели (или бесщеточные двигатели, BLDC) имеют якорь из постоянных магнитов и не имеют коллектора и щеток, а работают со специальной электронной схемой.
Якорь двигателя двигателя постоянного тока имеет очень низкое сопротивление. По этой причине при запуске двигателя последовательно с ним включается переменное сопротивление, которое выводится по мере того, как якорь набирает скорость.
Когда проводник с током вносится в магнитное поле, на него начинает действовать сила, зависящая от трех факторов: от напряженности поля, от величины тока и от длины проводника.
Сила, приводящая во вращение якорь электродвигателя, зависит от тех же трех факторов. При этом эффективная длина обмотки приблизительно равна удвоенной длине якоря, умноженной на число витков.
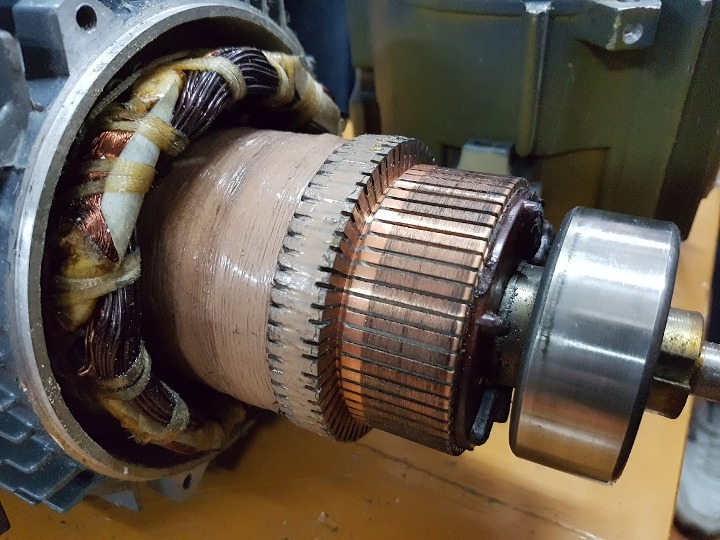
Двигатель постоянного тока в разобранном виде
Электромагнит двигателя постоянного тока можно возбудить тремя различными способами, и в каждом из этих способов возбуждения двигатель работает по-разному.
Обмотка электромагнита и якорь могут быть соединены тремя способами: последовательно (сериесное возбуждение), параллельно (шунтовое возбуждение) и смешанно (компаунд-возбуждение).
В электродвигателе постоянного тока с последовательным возбуждением весь ток проходит как через якорь, так и через обмотку электромагнита.
Следовательно, вращающий момент, действующий на якорь, изменяется пропорционально квадрату тока, поскольку крутящее усилие зависит от тока в якоре и от напряженности магнитного поля, которая линейно меняется в зависимости от тока в обмотке электромагнита.
В результате, когда действие большой нагрузки замедляет вращение якоря двигателя с последовательным возбуждением, так что обратная э. д. с. становится малой, то через якорь и обмотку электромагнита идет сильный ток, создающий значительную силу для вращения якоря.
Двигатели постоянного тока с последовательным возбуждением используются в трамваях, электровозах, автомобильных стартерах и в других машинах, которые работают в условиях быстро прикладываемых значительных нагрузок.
Обычно такие двигатели соединяются с приводимыми в движение машинами с помощью шестереночных, а не ременных передач, поскольку если при работе двигателя нагрузка на него резко снижается, то двигатель разгоняется до опасной скорости (они не имеют ограничения скорости) . На холостом ходу двигатель может работать на высоких оборотах, когда существует риск механического разрыва ротора с возможным травмированием оператора.
Современные технологии с преобразователем частоты позволяют полностью и в равной степени заменить такие двигатели на трехфазные асинхронные двигатели, а в последних разработках — на трехфазные синхронные двигатели с постоянными магнитами на роторе.
Обладая такой же мощностью и такими же характеристиками крутящего момента, они меньше, легче и позволяют рекуперацию энергии, если это позволяют условия эксплуатации источника питания.

Схема подключения электродвигателя
В двигателя постоянного тока с параллельным возбуждением ток разветвляется, одна часть его идет через якорь, а другая — через обмотку электромагнита. При этом полный ток в обеих ветвях равен току, питающему двигатель.
В результате вращающий момент якоря пропорционален первой степени тока, тогда как в двигателях с последовательным возбуждением этот момент меняется как квадрат тока.
Когда якорь двигателя с параллельным возбуждением начинает вращаться медленнее при повышении нагрузки на двигатель, через якорь пойдет больший, а через обмотку электромагнита — меньший ток.
В результате вращающий момент останется неизменным. Поэтому двигатель в течение всего времени, пока к нему приложена нагрузка, будет работать на скорости, пониженной по сравнению с его холостым ходом.
Такое подключение двигателя позволяет независимо регулировать и определять ток в обмотке возбуждения статора и обмотке ротора (якорь). Это позволяет изменять скорость и крутящий момент двигателя.
Двигатели с параллельным возбуждением непригодны для больших нагрузок. По этой причине они находят применение в таких установках, где нагрузка постоянная и где требуется постоянная скорость вращения, например электрических вентиляторах, воздуходувках, жидкостных насосах и т. п.
Электродвигатели постоянного тока со смешанным возбуждением имеют две обмотки возбуждения (одну для параллельного включения, другую — для последовательного). Они не разгоняются при ослаблении нагрузки и вместе с тем пригодны для больших нагрузок. Почему это так, предоставляю объяснить читателю и поделиться своими идеями в комментарии к статье.
Двигатели этого типа применяются в подъемниках, штамповочных прессах и других машинах, где в начальный момент работы машины необходимы значительные усилия. Последовательное возбуждение во многих случаях выключается после набора двигателем определенной скорости.
Вопрос. Какого вида возбуждения двигатель постоянного тока показан на фотографии в статье?
Источник
Управление возбуждением двигателей постоянного тока
Управление двигателями постоянного тока
По способу возбуждения двигатели постоянного тока подразделяются аналогично генераторам на двигатели независимого (рис.1), параллельного (рис.2), последовательного (рис.3) и смешанного (рис.4) возбуждения. При параллельном, последовательном и смешанном возбуждении напряжение на обмотке возбуждения зависит от напряжения на обмотке якоря, при независимой системе возбуждения, обмотка возбуждения питается от дополнительного источника постоянного тока и не зависит от режима работы и нагрузки двигателя.
 Рис.1 Схема независимого возбуждения
Рис.1 Схема независимого возбуждения
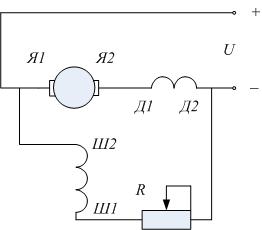 Рис.2 Схема параллельного возбуждения
Рис.2 Схема параллельного возбуждения
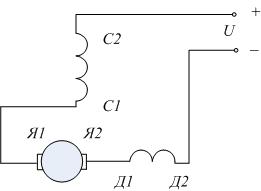 Рис.3 Схема последовательного возбуждения
Рис.3 Схема последовательного возбуждения
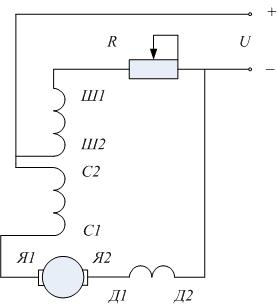 Рис.4 Схема смешанного возбуждения
Рис.4 Схема смешанного возбуждения
Для регулирования скорости двигателей постоянного тока применяют различные способы.
В общем случае скорость двигателя определяется выражением:

Как видно из выражения (1.1), регулировать скорость двигателя постоянного тока возможно двумя способами:
— Изменением питающего напряжения U
— Изменением магнитного потока машины Ф (изменением тока возбуждения)
Раньше регулирование питающего напряжения встречало трудности связанные с преобразованием напряжения постоянного тока, изменение скорости вращения двигателя осуществлялось с помощью включения в цепь якоря дополнительного регулировочного реостата. Основными недостатками этого метода являются потери в реостате, через который протекает ток полной нагрузки двигателя, неудобство управления.
Наиболее удобным, распространенным и экономичным способом регулирования скорости вращения двигателя постоянного тока, является изменение магнитного потока машины (изменение тока возбуждения). Экономия связана с тем, что в данном случае управлять можно не большим током якоря, а малым током возбуждения, что уменьшает потери и удешевляет систему управления. Однако этот способ позволяет лишь увеличивать скорость вращения двигателя.
Согласно выражению (1.1), с уменьшением Ф скорость возрастает (рис.5). Двигатели рассчитываются для работы при номинальном режиме с наибольшим значением Ф, т. е. с наименьшей величиной n. При таком регулировании к. п. д. двигателя остается высоким, так как мощность возбуждения мала, и потери при регулировании минимальны. Максимальная скорость вращения в данном случае ограничивается механической прочностью машины и условиями ее коммутации.
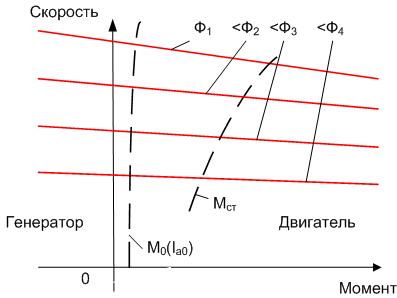
Рис.5 Характеристики ДПТ при регулировании тока возбуждения
Современные способы регулирования скорости двигателей постоянного тока
Сегодня основным средством управления двигателями постоянного тока становятся современные тиристорные регуляторы (назовем их “приводы постоянного тока”), их производят множество фирм, специализирующихся на приводной технике (например, Control Techniques, Siemens, Sprint-Electric и т.д.). Современные приводы постоянного тока позволяют управлять не только скоростью вращения двигателя, но и его моментом (например, на линиях намотки). За счет различных интерфейсов обмена сигналами с автоматизированной системой управления, изменять параметры работы двигателя достаточно просто и удобно.
Приводы постоянного тока могут работать как в одном квадранте, так и во всех четырех, при этом изменяя не только ток обмотки якоря, но и ток обмотки возбуждения — многие приводы имеют встроенные “контроллеры поля”, что дает возможность регулировать скорость двигателя в самом широком диапазоне.
Следует отметить, что “ослабление” поля при задании скорости двигателя выше номинальной, привод производит автоматически, контроллер поля представляет собой тот же тиристорный регулятор. Встроенные контроллеры поля имеют приводы Mentor, Mentor MP (Control Techniques), PL, PLX (Sprint-Electric). Остальные модели приводов постоянного тока этих брендов для питания обмотки возбуждения двигателей имеют неуправляемые выпрямители.
Номинальный ток контроллеров возбуждения приводов постоянного тока имеют следующие значения:
Sprint-Electric PL, PLX — 8A (для приводов с номинальным током якоря 12-123A), 16A (для приводов с номинальным током якоря 155-330A), 32A (для приводов с номинальным током якоря 430-630A).
Control Techniques Mentor — M25(R) — M210(R) — 8 А, остальные габариты с неуправляемым выпрямителем.
Control Techniques Mentor MP —
MP25Ax(R), MP45Ax(R), MP75Ax(R), MP105Ax(R), MP155Ax(R), MP210Ax(R) — 8А
MP350Ax(R), MP420Ax(R), MP550Ax(R), MP700Ax(R), MP825Ax(R), MP900Ax(R) — 10A
MP1200Ax(R), MP1850Ax(R) — 20А.
Для токов обмотки возбуждения имеющих значение свыше 8А, Control Techniques предлагает внешние контроллеры поля, которые связываются с приводом постоянного тока по цифровой шине — это контроллеры FXM-5 (до 90А) и FXMP-25 (до 25А).
На практике часто встречаются двигатели с низковольтными обмотками возбуждения с большими токами. В данном случае, для изменения тока можно применить приводы постоянного тока, при этом вместо обмотки якоря подключить обмотку возбуждения. Это может быть любой аналоговый или цифровой привод постоянного тока. При использовании в качестве регуляторов поля простых аналоговых преобразователей Sprint-Electric (модели 340, 680, 1220, 340i, 680i, 1220i, 370, 370E, 400E, 800E, 1200E, 400, 800, 1200, 400i, 1600i, 3200i, SL, SLE), производитель рекомендует настраивать их в режим управления моментом.
Привод Mentor MP (Control Techniques) имеет для этого специальный режим.
Источник



