
Способы передачи вращательного движения.
Передача – устройство, главная функция которого передача энергии на расстояние, в зависимости от способа передачи энергии, они могут быть: механические, электрические, пневматические, гидравлические. Механической передачей называется механизм, который преобразует параметры движения источника энергии (двигателя) при передаче исполнительным органам, в этом случае передача осуществляет согласование параметров движения двигателя и исполнительного рабочего органа.
Передачи вращательного движения по способу соединения тел вращения бывают: 1) передачи с контактом тел вращения – зубчатые, червячные, фрикционные, винтовые, 2) передачи гибкой связью – ремённые и цепные; по способу передачи движения – передачи с зацеплением (зубчатые, червячные, цепные), трением – ременные и фрикционные. Электри́ческая переда́ча — обеспечивает передачу тягового усилия от первичного двигателя к движителю или исполнительному органу, используя электрически соединённые электрогенератор и электродвигатель.
Сложное движение. Плоскопараллельное движение тела.
Плоскопаралле́льное движе́ние — вид движения абсолютно твёрдого тела, при котором траектории всех точек тела располагаются в плоскостях, параллельных заданной плоскости.
Примером плоскопараллельного движения по отношению к вертикальной плоскости, относительно которой тело движется в параллельном направлении, является качение колеса по горизонтальной дороге.
Пример плоскопараллельного движения относительно плоскости чертежа — качение колеса по горизонтальной дороге. Все точки колеса движутся параллельно плоскости рисунка.
Здесь плоскопараллельное движение в каждый момент времени может быть представлено в виде суммы двух движений — полюса C, являющегося не чем иным, как центром вращения колеса в связанной с ним системе координат (в общем случае по любой траектории на плоскости с точки зрения неподвижного наблюдателя) и вращательного движения остальных точек тела вокруг этого центра.
 Вращение тела в случае его плоско-параллельного движения не является необходимым признаком последнего. В таком случае вектор абсолютной скорости движения любой точки будет определяться векторной суммой переносной скорости движения центра вращения С, (одинаковой для расчёта скорости любой точки колеса). И вектора относительной скорости выбранной точки, зависящей от её положения, угловой скорости вращения и расстояния от центра.
Вращение тела в случае его плоско-параллельного движения не является необходимым признаком последнего. В таком случае вектор абсолютной скорости движения любой точки будет определяться векторной суммой переносной скорости движения центра вращения С, (одинаковой для расчёта скорости любой точки колеса). И вектора относительной скорости выбранной точки, зависящей от её положения, угловой скорости вращения и расстояния от центра.
Если в данный момент для точки контакта колеса с поверхностью (точки А) эти скорости равны по модулю и противоположны по направлению, имеет место случай чистого (без проскальзывания) качения, что показано на рисунке. Только в этом случае скорость точки М будет в 2 раза больше скорости точки С и направлена в ту же сторону. В общем случае их соотношение может быть любым не только по величине, но и по направлению.
Сложное движения. Определение скорости любой точки тела.
Теорема 1. Абсолютная скорость  любой точки плоской фигуры в каждый данный момент равна геометрической сумме двух скоростей: скорости
любой точки плоской фигуры в каждый данный момент равна геометрической сумме двух скоростей: скорости  произвольно выбранного полюса в поступательном движении плоской фигуры и вращательной скорости
произвольно выбранного полюса в поступательном движении плоской фигуры и вращательной скорости  во вращательном движении фигуры относительно полюса.
во вращательном движении фигуры относительно полюса.
Положение любой точки В тела можно определить равенством:

 Взяв производную от обеих частей уравнения по времени получим,
Взяв производную от обеих частей уравнения по времени получим,
где  — искомая скорость;
— искомая скорость;  — скорость полюса;
— скорость полюса;  — скорость точки В при вращательном движении тела вокруг полюса А при
— скорость точки В при вращательном движении тела вокруг полюса А при  Таким образом
Таким образом
 ,
, 
 Теорема 2. Проекции скоростей двух точек плоской фигуры на ось, проходящую через эти точки, равны и имеют одинаковый знак. Зная, что
Теорема 2. Проекции скоростей двух точек плоской фигуры на ось, проходящую через эти точки, равны и имеют одинаковый знак. Зная, что  , спроецируем данное выражение на прямую АВ, тогда
, спроецируем данное выражение на прямую АВ, тогда
Теорема 3. Плоская фигура в каждый момент времени имеет одну точку, абсолютная скорость которой равна нулю. Эта точка называется мгновенным центром скоростей (МЦС), обозначим ее буквой Р. Докажем существование МЦС  тогда точка Р и будет искомой.
тогда точка Р и будет искомой.
 ,
,
Источник
Механизмы передач вращательного движения

![]()
Содержимое разработки
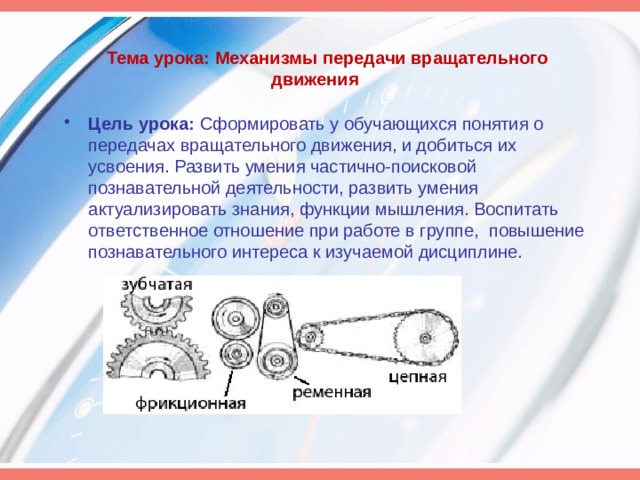
Тема урока: Механизмы передачи вращательного движения
- Цель урока: Сформировать у обучающихся понятия о передачах вращательного движения, и добиться их усвоения. Развить умения частично-поисковой познавательной деятельности, развить умения актуализировать знания, функции мышления. Воспитать ответственное отношение при работе в группе, повышение познавательного интереса к изучаемой дисциплине.
Вращательное движение получило наибольшее распространение в механизмах и машинах, так как обладает следующими достоинствами :
Все современные двигатели для уменьшения габаритов и стоимости выполняют быстроходными с весьма узким диапазоном изменения угловых скоростей. Передача механической энергии от двигателя к рабочему органу машины осуществляется с помощью различных передач.
Передачей будем называть устройство, предназначенное для передачи энергии из одной точки пространства в другую, расположенную на некотором расстоянии от первой
обеспечивает непрерывное и равномерное движение при небольших потерях на трение;
позволяет иметь простую и компактную конструкцию передаточного механизма.
Механизм – это сочетание деталей (звеньев), предназначенных для преобразования движения одного или нескольких тел в требуемое движение других тел.
В механизме различают ведущую и ведомую детали.
Одно из звеньев, которое передает движение другому, называют ведущим .
А звено, которое получает движение от ведущего звена, называют ведомым .
Ведущее звено приводится в движение внешней силой (рука, нога, электродвигатель и т.п.), а ведомое звено приходит в движение от ведущего.
Механизмы, предназначенные для передачи движения с преобразованием скорости и крутящего момента, называются механизмами передачи движения .
При помощи передач изменяют скорость, направление движения, преобразуют вращательное движение в поступательное и винтовое т.е.
Механическими передачами, или просто передачами, называют механизмы для передачи энергии от машины-двигателя к машине-орудию, как правило, с преобразованием скоростей, моментов, а иногда — с преобразованием видов (например, вращательное в поступательное) и законов движения .
Классификация механических передач
по энергетической характеристике
по принципу передачи движения:
механические передачи делятся на:
- передачи трением (примеры: фрикционная — рис.1, а и ременная — рис.2, а) — действующие за счет сил трения, создаваемых между элементами передач;
- — зацеплением (примеры: зубчатые — рис.1, б, червячные — рис.1, в; цепные — рис.2, б; передачи винт-гайка — рис.1, г, д) — работающие в результате возникновения давления между зубьями, кулачками или другими специальными выступами на деталях.
- — кинематические (передаваемая мощность Р
- — силовые (передаваемая мощность Р ≥0,1 кВт).
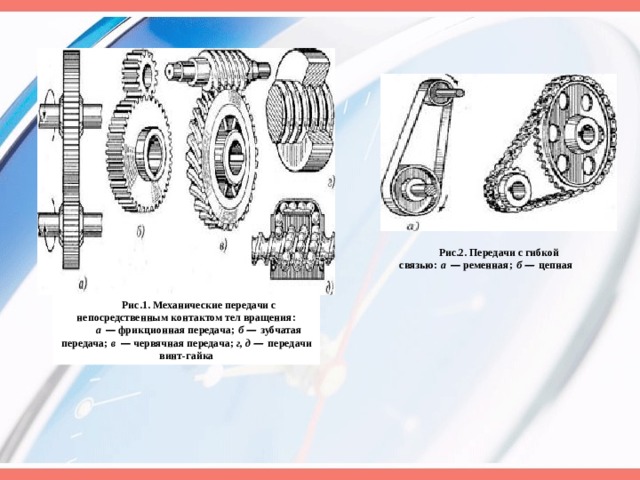
Рис.1. Механические передачи с непосредственным контактом тел вращения:
по взаимному расположению валов в пространстве
– с параллельными валами зубчатые с цилиндрическими колесами, фрикционные с цилиндрическими роликами, цепные;
– с пересекающими валами — зубчатые и фрикционные конические, фрикционные лобовые;
– с перекрещивающимися валами — зубчатые — винтовые и коноидные, червячные, лобовые фрикционные со смещением ролика;
— с соосными валами.
по характеру изменения передаточного отношения (числа)
— передачи с постоянным (неизменным) передаточным отношением;
— передачи с переменным (изменяемым или по величине, или по направлению или и то и другое вместе) передаточным отношением.
по способу соединения деталей:
— передачи с непосредственным контактом тел вращения (фрикционные, зубчатые, червячные, передачи винт-гайка — см. рис.1);
— передачи с гибкой связью (ременная, цепная — см. рис.2).
по характеру изменения скорости
— регулируемые (со ступенчатым регулированием и бесступенчатым (плавным) регулированием);
по числу ступеней (т.е. отдельных передач , взаимно связанных и одновременно участвующих в передаче и преобразовании движения )
по конструктивному оформлению
– открытые (не имеют общего закрывающего их корпуса);
– полузакрытые, смонтированные в легкий защитный кожух, который не выполняет силовых функций;
– закрытые, заключенные в общий прочный и жесткий корпус, объединяющий все подшипниковые узлы и выполняющий герметизацию и постоянную смазку передачи.
по характеру движения валов
– простые передачи, в которых валы вращаются лишь вокруг своих осей, а оси валов и сопряженные с ними детали остаются в пространстве неподвижными;
— планетарные передачи, в которых оси и сопряженные с ними детали (сателлиты) перемещаются в пространстве. Разновидностью планетарных передач являются волновые передачи.
по подвижности осей и валов
— передачи с неподвижными осями валов рядовые (коробки скоростей, редукторы);
— передачи с подвижными осями валов (планетарные передачи, вариаторы с поворотными роликами).
Основные характеристики передач
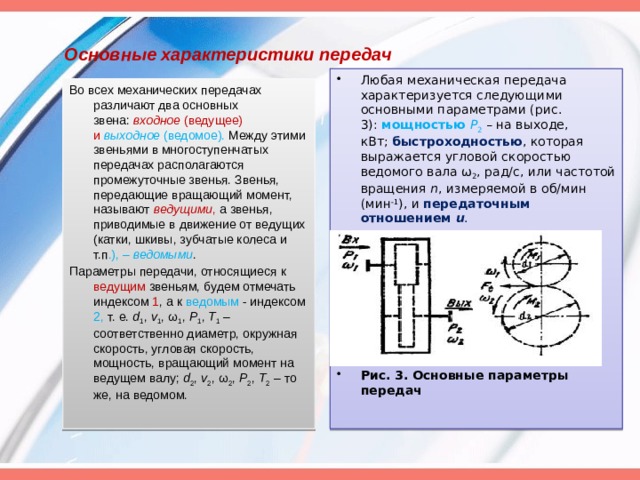
- Любая механическая передача характеризуется следующими основными параметрами (рис. 3): мощностьюР 2 – на выходе, кВт; быстроходностью , которая выражается угловой скоростью ведомого вала ω 2 , рад/с, или частотой вращения n , измеряемой в об/мин (мин -1 ), и передаточным отношениемu .
- Рис. 3. Основные параметры передач
Во всех механических передачах различают два основных звена: входное (ведущее) и выходное (ведомое). Между этими звеньями в многоступенчатых передачах располагаются промежуточные звенья. Звенья, передающие вращающий момент, называют ведущими , а звенья, приводимые в движение от ведущих (катки, шкивы, зубчатые колеса и т.п .), – ведомыми .
Параметры передачи, относящиеся к ведущим звеньям, будем отмечать индексом 1 , а к ведомым — индексом 2, т. е. d 1 , v 1 , ω 1 , P 1 , T 1 – соответственно диаметр, окружная скорость, угловая скорость, мощность, вращающий момент на ведущем валу; d 2 , v 2 , ω 2 , P 2 , T 2 – то же, на ведомом.
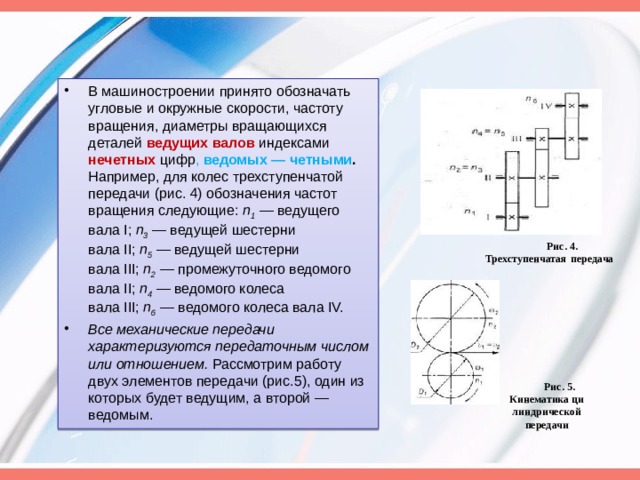
- В машиностроении принято обозначать угловые и окружные скорости, частоту вращения, диаметры вращающихся деталей ведущих валов индексами нечетных цифр , ведомых — четными. Например, для колес трехступенчатой передачи (рис. 4) обозначения частот вращения следующие: п1 — ведущего вала I; п3— ведущей шестерни вала II; п5 — ведущей шестерни вала III; п2— промежуточного ведомого вала II; п4 — ведомого колеса вала III; п6— ведомого колеса вала IV.
- Все механические передачи характеризуются передаточным числом или отношением. Рассмотрим работу двух элементов передачи (рис.5), один из которых будет ведущим, а второй — ведомым.
Рис. 4. Трехступенчатая передача
Рис. 5. Кинематика ци линдрической передачи
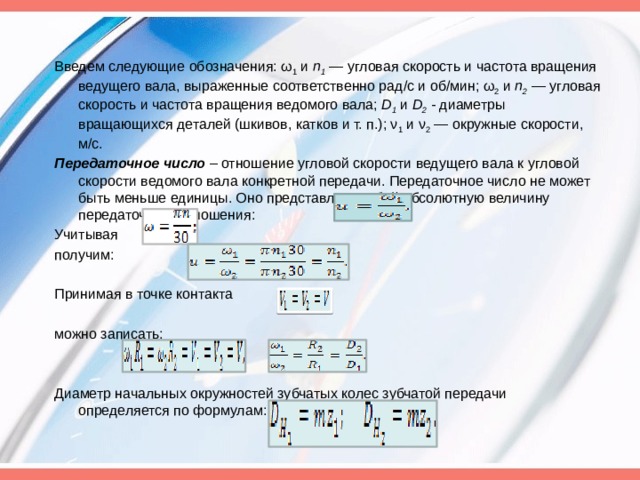
Введем следующие обозначения: ω 1 и п 1 — угловая скорость и частота вращения ведущего вала, выраженные соответственно рад/с и об/мин; ω 2 и п 2 — угловая скорость и частота вращения ведомого вала; D 1 и D 2 — диаметры вращающихся деталей (шкивов, катков и т. п.); ν 1 и ν 2 — окружные скорости, м/с.
Передаточное число – отношение угловой скорости ведущего вала к угловой скорости ведомого вала конкретной передачи. Передаточное число не может быть меньше единицы. Оно представляет собой абсолютную величину передаточного отношения:
Принимая в точке контакта
Диаметр начальных окружностей зубчатых колес зубчатой передачи определяется по формулам:
- Передаточное число:
- Таким образом, для любой передачи:
- Отношение угловых скоростей ведущего ω 1 и ведомого ω 2 звеньев называют также передаточным отношением и обозначают і .
- Передаточное число в отличие от передаточного отношения всегда положительное и не может быть меньше единицы . Передаточное число характеризует передачу только количественно.
 1; при и Передачи выполняют с постоянным, переменным или регулируемым передаточным отношением. Как те, так и другие, широко распространены. Регулирование передаточного отношения может быть ступенчатым или бесступенчатым. Ступенчатое регулирование реализуется в коробках передач с зубчатыми колесами, в ременных передачах со ступенчатыми шкивами и т. п.; бесступенчатое регулирование – с помощью фрикционных, ременных или цепных вариаторов » width=»640″
1; при и Передачи выполняют с постоянным, переменным или регулируемым передаточным отношением. Как те, так и другие, широко распространены. Регулирование передаточного отношения может быть ступенчатым или бесступенчатым. Ступенчатое регулирование реализуется в коробках передач с зубчатыми колесами, в ременных передачах со ступенчатыми шкивами и т. п.; бесступенчатое регулирование – с помощью фрикционных, ременных или цепных вариаторов » width=»640″
Устройства, повышающие частоты вращения, называют ускорителями или мультипликаторами
- В передаче, понижающей частоту вращения n (угловую скорость ω), u 1; при и
- Передачи выполняют с постоянным, переменным или регулируемым передаточным отношением. Как те, так и другие, широко распространены. Регулирование передаточного отношения может быть ступенчатым или бесступенчатым. Ступенчатое регулирование реализуется в коробках передач с зубчатыми колесами, в ременных передачах со ступенчатыми шкивами и т. п.; бесступенчатое регулирование – с помощью фрикционных, ременных или цепных вариаторов
Источник



