- Классификация по способу передачи сигналов управления, по стабильности и алгоритму управления.
- Передача данных и виды связи
- Последовательный метод передачи информации
- Скорость обмена данными
- Управление потоком
- Режимы связи
- Симплексная связь
- Полудуплексная связь
- Дуплексная связь
- Передача линейных и управляющих сигналов
- Передача сигналов по двум выделенным каналам
- Аппаратурная реализация
- Подсистема передачи пользователя (Уровень 4). Подсистема ISUP
Классификация по способу передачи сигналов управления, по стабильности и алгоритму управления.




![]()
![]()
По хар-ру передачи сигнала:
1) непрерывные системы (в процессе упр.сигнал не прерывается)
2) дискретные сист(в процессе упр.сигнал прерывается)
По хар-ру процесса управления :
1) Сист с детерминированными параметрами – у кот. в проц-ссе упр. парам. состояние элементов САУ не измен.
2) Стохастические САУ – в кот. параметры (управления ) элементов в процессе упр. могут изм (функции времени или др. параметры)
По хар-ру функционирования сист.:
1) Обычные САУ – замкнутые САУ с неизм. парам. вход. в САУ могут быть неприрывн., дискретными , релейными.
2) Адаптивные САУ – существует много методов адптации:
а)самонастривающ. САУ (сами изм. коэф. сист.)
б)самоорганизуещие сист (процессе упр автом изм свою структ)
в) самоалгоритмизирующиеся ( автом изм алгоритм своего функц-я)
г)экстремальные ( сист, кот автоматически находят точку экстремума хода тех процесса)
3)терминаьные САУ (на базе ЭВМ)
По наличию статической ошибки регулирования:
1) Статическая САР – обязательно имеет статич ошибку, может только уменьшать ошибку рег-я, но ликвидировать
2)Астатическая САР – не имеет статич ошибки, она способна полностью компенсировать действия возмущения и свести стат ошибку к 0.
10. Виды схем, использующихся в ТАУ.
1) Схема электрическая принципиальная
2) Схема функциональная
3) Схема структурная
1) СЭП дает полное представление о принципе работы установки, о составе элементов схемы САУ и их взаимодействии. СЭП выполняется в соответствии с ЕСКД(единая система конструкторской документации).ЕСКД регламентируется ГОСТом. По этой системе все элементы, входящие САУ.
2) СФ в ТАУ используется в построении структурной схемы. На этой схеме выполняется ход сигналы упр. и элементы зи кот строится САУ. (Не охвачена ЕСКД и не является элементом рабочей документации, выполняется в виде рисунка)
3) СС служит для изучения динамических свойств САУ. Элементами САУ являются динамические звенья и сумматоры. Динамические схемы изображаются в виде прямоугольников, имеющих входящую и выходящую стрелки. Стрелки показывают направления прохождения сигнала.
11. Понятие о схеме электрической принципиальной (определение, назначение, пример)
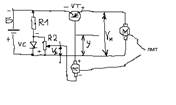
М — электрическая машина
VT – регулятор напр машины- транзистор
R1- параметрический стабилизатор напряжения
ТГ – датчик скорости вращения машины – тахогенератор
Принцип работы:R2 задается скорость двигателя, при вращении изменяется М , двигатель уменьшает обороты на одном валу присоединен ТГ, скорость его уменьшается. ТГ выдает напряжение , проп-ое ск-ти вращения Етг=кw – напр. обратной связи, напр. задания сравн. с напр. обр. связи они включены встречно. При этом транзистор открывается больше, т.е. пропускает большее напряжение на двигатель, кот. увеличивает скорость, компенсирует (напряжение) изменение М.
12.Понятие о схеме функциональной .
Одним из этапов анализа и синтеза САР является разработка функциональной схемы. За основу берется схема электрическая схема принципиальная.
ТГ вкл в схему т.о. что осуществляется гальваническое суммирование напр. тахогенератора Етг . Этот гальв сумматор осущ вычитание , т.к. напр. задание и Етг вкл встречно.
В уст. режимах напр. задания всегда больше Етг.
На ФС нет электрических цепей. Стрелки указывают соед элементов между собой и напр. входа сигнала управления.
На ФС количество блоков может быть избыточным.Сигнал управления может проходить не через все элементы, поэтому для построения СС САР используются только те элементы, через кот. проходит сигнал управления.
Источник
Передача данных и виды связи
Передача данных играет очень большую роль в электронике.
В прошлых статьях по цифровой электронике я рассказывал о цифровых сигналах. Чем же так хороши эти цифровые сигналы? Как это бы странно не звучало, но цифровые сигналы по своей природе являются аналоговыми, так как передаются путем изменения значения напряжения или тока, но передают сигналы с ранее оговоренными уровнями. По своей сути, они являются дискретными сигналами. А что означает слово «дискретный»? Дискретный — это значит состоящий из отдельных частей, раздельный, прерывистый. Цифровые сигналы относятся как раз к дискретным сигналам, так как имеют только ДВА СОСТОЯНИЯ: «активно» и «не активно» — «есть напряжение/ток» и «нет напряжения/тока».
Главный плюс цифровых сигналов в том, что их проще передавать и обрабатывать. Для передачи чаще всего используют напряжение. Поэтому, принято два состояния: напряжение близко к нулю (менее 10% от значения напряжения) и напряжение близко к напряжению питания (более 65% от значения). Например, при напряжении питания схемы 5 Вольт мы получаем сигнал с напряжением 0,5 Вольт — «ноль», если же 4,1 Вольта — «единица».
Последовательный метод передачи информации
Есть просто два провода, источник электрического сигнала и приемник электрического сигнала, которые цепляются к этим проводам.

Это ФИЗИЧЕСКИЙ УРОВЕНЬ.
Как мы уже сказали, по этим двум проводам мы можем передавать только два сигнала: «есть напряжение/ток» и «нет напряжения/тока». Какие способы передачи информации мы можем реализовать?
Самый простой способ — сигнал есть (лампочка горит) — это ЕДИНИЧКА, сигнала нет (лампочка не горит) — это НОЛЬ

Если пораскинуть мозгами, можно придумать еще несколько различных комбинаций. Например, широкий импульс принять за единичку, а узкий — за ноль:

Или даже вообще взять за единичку и ноль фронт и срез импульса. Внизу рисунок, если подзабыли, что такое фронт и срез импульса.

А вот и практическая реализация:

Да можно хоть сколько придумать различных комбинаций, если «получатель» и «отправитель» согласуют прием и передачу. Здесь я привел просто самые популярные способы передачи цифрового сигнала. То есть все эти способы и есть ПРОТОКОЛЫ. И их, как я уже сказал, можно напридумывать очень много.
Скорость обмена данными
Представьте себе картину… Студенты, идет лекция… Преподаватель диктует лекцию, а студенты ее записывают

Но если преподаватель очень быстро диктует лекцию и в придачу эта лекция по физике или матанализу, то в результате получаем:

Почему же так произошло?
С точки зрения цифровой передачи данных, можно сказать, что скорость обмена данными между «Отправителем» и «Получателем» разная. Поэтому, может быть реальна ситуация, когда «Получатель» (студент) не в состоянии принять данные от «Отправителя» (преподавателя) из-за несоответствия скорости передачи данных: скорость передачи может быть выше или ниже той, на которую настроен приемник (студент).
Данная проблема в разных стандартах последовательной передачи данных решается по-разному:
- предварительная договоренность о скорости передачи данных (договориться с преподавателем, чтобы диктовал лекцию медленнее или чуть быстрее);
- перед передачей информации «Отправитель» передает некую служебную информацию, используя которую «Получатель» подстраивается под «Отправителя» ( Преподаватель: «Кто не запишет эту лекцию полностью, тот не получит зачет»)
Чаще всего, используется первый способ: в устройствах связи заранее устанавливается необходимая скорость обмена данными. Для этого используется тактовый генератор, который вырабатывает импульсы для синхронизации всех узлов устройства, а также для синхронизации процесса связи между устройствами.
Управление потоком
Также возможна ситуация, когда «Получатель»(студент) не готов принимать передаваемые «Отправителем»(преподавателем) данные по какой-либо причине: занятость, неисправность и др.

Решается эта проблема различными методами:
1) На уровне протоколов. Например, в протоколе обмена оговорено: после передачи «Отправителем» служебного сигнала «начало передачи данных» в течение определенного времени «Получатель» обязан подтвердить принятие этого сигнала путем передачи специального служебного сигнала «готовность к приему».
Данный способ называют «программным управлением потоком» — «Soft»

2) На физическом уровне — используются дополнительные каналы связи, по которым «Отправитель» ДО передачи информации запрашивает у «Получателя» о его готовности к приему). Такой способ называют «аппаратным управлением потоком» — «Hard»;

Оба метода очень распространены. Иногда они используются одновременно: и на физическом уровне, и на уровне протокола обмена.
При передаче информации важно засинхронизировать работу передатчика и приемника. Способ установки режима связи между устройствами называют «синхронизацией». Только в этом случае «Получатель» может правильно (достоверно) принять переданное «Отправителем» сообщение.
Режимы связи
Симплексная связь
В этом случае Получатель может только принимать сигналы от отправителя и никак не может на него повлиять. Это в основном телевидение или радио. Мы можем их только или смотреть или слушать.

Полудуплексная связь
В этом режиме и отправитель и получатель могут передавать друг другу сигналы поочередно, если канал свободен. Отличный пример полудуплексной связи — это рации. Если оба абонента будут трещать каждый в свою рацию одновременно, то никто никого не услышит.
— Первый, первый. Я второй. Как слышно?
— Слышу вас нормально, отбой!

Сигнал может посылать только отправитель, в этом случае получатель его принимает. Либо сигнал может отправлять получатель, а в этом случае отправитель его получает. То есть и отправитель и получатель имеют равные права на доступ к каналу (линии связи). Если они сразу оба будут передавать сигнал в линию, то, как я уже сказал, ничего из этого не получится.
Дуплексная связь
В этом режиме и прием и передача сигнала могут вестись сразу в двух направлениях одновременно. Яркий тому пример — разговор по мобильному или домашнему телефону, или разговор в Skype.
Источник
Передача линейных и управляющих сигналов
Передача сигналов по двум выделенным каналам
При рассмотрении принципов использования временных каналов при цифровом потоке с импульсно-кодовой модуляцией приводилось два способа применения 16-го канала (канал сигнализации) [16, 17].
В первом случае сигналы управления передаются для любого из каналов тракта (общий канал сигнализации) со скоростью 64 Кбит/с. Такой принцип передачи сигналов будет рассмотрен в дальнейшем.
Второй способ получил название выделенный канал. В этом случае за каждым информационным каналом закрепляется сигнальный канал с реальной скоростью передачи для каждого 4 Кбит/c. Он был весьма распространен при связи с электромеханическими системами по цифровым трактам. Образование в цифровом тракте выделенного канала уже рассматривалась в разделе в «Коммутационные поля на микроэлектронной элементной базе» при описании рис. 2.1. При этом принципе 16-й канал разделяется на две части по 4 бита каждый. Принцип их использования подробно изложен в «Коммутационные поля на микроэлектронной элементной базе» .
В таблицах 5.1и 5.2приведены линейные сигналы, передаваемые по двум выделенным каналам.
| № | Направление сигнала | Название сигнала | Состояние бит | Примечание | |||
|---|---|---|---|---|---|---|---|
| 1 ВСК (a) | 2 ВСК (b) | c | d | ||||
| 1 | —-> | ЗАНЯТИЕ | 1 | 0 | 0 | 1 | Передается при появлении нового вызова |
| 2 | —-> | НАБОР НОМЕРА | Время передачи: Импульса – 50 мс Межцифрового интервала – 700 мс | ||||
| 3 | —-> | РАЗЪЕДИНЕНИЕ | 1 | 1 | 0 | 1 | Передается в случае освобождения исходящей СЛ (отбой A и др.) |
| 4 | —-> | ОТБОЙ A | 0 | 0 | 0 | 1 | Может быть принят, если АТС реализует систему двухстороннего отбоя |
| № | Направление сигнала | Название сигнала | Состояние бит | Примечание | |||
|---|---|---|---|---|---|---|---|
| 1 ВСК (a) | 2 ВСК (b) | c | d | ||||
| 1 | посылки сигнала «занято» | ||||||
| 2 | Информация , касающаяся соединения по любому каналу из группы, проходит по общему каналу и сопровождается адресом источника. Преимущества такого способа следующие:
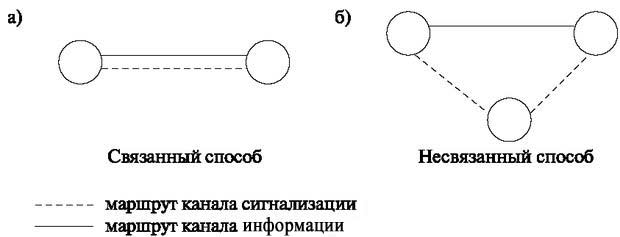
С точки зрения управления этот недостаток присущ системам с централизованным управлением, где программа управления ОКС связана с одним (резервированным устройством). В децентрализованной системе могут быть несколько модулей, программное обеспечение которых управляет сигнализацией. Общие каналы сигнализации представляют отдельную сеть и коммутируются по правилам коммутации сообщений. Возможны следующие способы маршрутизации сигнальных сообщений (рис. 5.1).
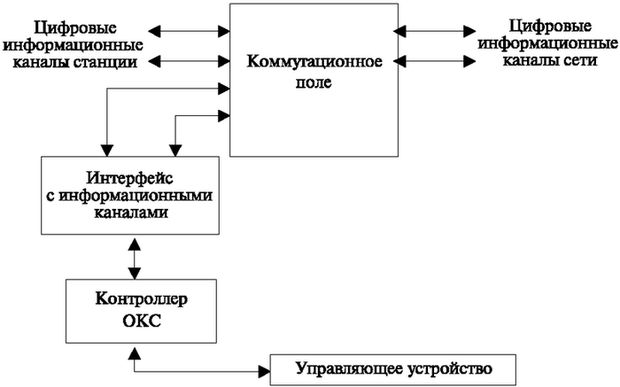
Согласно первому способу (связанный ОКС), маршрутизация каналов сигнализации проводится совместно с маршрутизацией информационных каналов. При этом их маршруты совпадают, как показано на рис. 5.1а. Второй способ — несвязный ОКС: маршрутизация сигнальной информации идет независимо от информационных каналов, и их маршруты могут не совпадать, как показано на рис. 5.1б. Часто используется квазисвязанный способ, который заключается в том, что связанный способ применяется в нормальном режиме функционирования сети, а при выходе из строя система переходит на резервные направления сигнализации, не совпадающие по маршруту с информационными каналами. Они обычно заданы заранее. Аппаратурная реализацияОсновные устройства, реализующие ОКС, показаны на рис. 5.2.
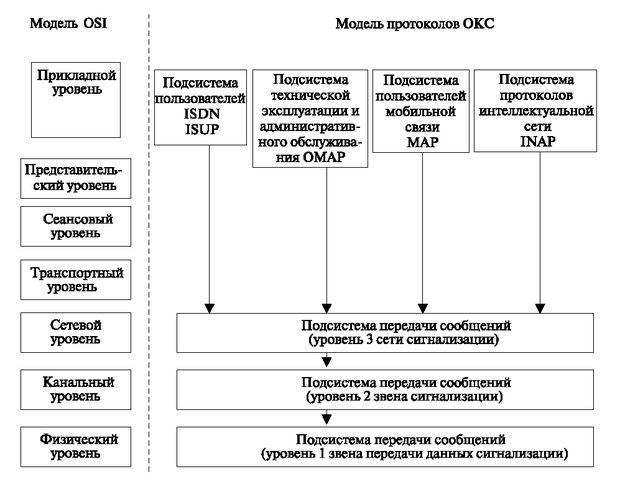
Первое из них — интерфейс с информационными каналами —реализует интерфейс с коммутационным полем . В зависимости от нагрузки входы ОКС могут занимать несколько входов в коммутационное поле . При этом в общем случае они имитируют цифровой поток и могут быть скоммутированы в любой канал любого тракта на выходе. Но как уже было указано, они коммутируются в 16-м канале каждого тракта (напомним, типовой ИКМ включает в себя 30 информационных каналов). Интерфейс позволяет накопить информацию от каждого канала сигнализации и коммутировать ее в 16-й канал требуемого тракта. Возможность коммутации с другими каналами создает возможности ликвидации аварийных ситуаций и резервирования. Контроллер ОКС может производить обработку сигналов и выполнять запросы нижних уровней протокола (физического и канального). Аппаратурная реализация части протокола, как правило, увеличивает быстродействие и устойчивость системы. Управляющее устройство представляет собой процессор и необходимые виды памяти. Это либо станционное управляющее устройство, либо устройство управления модулем. В первом случае при установлении соединения взаимодействуют программные блоки ОКС и установления соединения. Во втором требуется обмен информацией с другими модулями. На рис. 5.3 приводится диаграмма, сравнивающая архитектуру протоколов ОКС№7 и уровни OSI [16].
Три нижних уровня модели протоколов ОКС носят название протоколов передачи сообщений (Message Transfer Part — MTP ) и реализуются преимущественно с помощью аппаратуры (hardware). Прикладные уровни приведены для примера, и их число и функции меняются с развитием коммутационной техники. Например, не так давно выделялась подсистема телефонной сигнализации, теперь она полностью реализуется подсистемой ISUP, которая объединяет в себе особенности телефонных протоколов и системы ISDN. Усовершенствованием прикладного уровня является прикладная подсистема транзакций (TCAP — Transaction Capabilities Application Part). Введение этой подсистемы позволяет на прикладном уровне обобщить некоторые действия и программы, либо наиболее часто вызываемые, либо общие переходы (транзакции), характерные для нескольких прикладных задач. Такие проблемы очень характерны для услуг, оказываемых Интеллектуальными или Подвижными сетями. В подсистемах нижнего уровня имеется тенденция обеспечить передачу через ОКС не только данных, относящихся к сигнальной информации, но и других данных. В этом случае необходимо учитывать, что при передаче возникает две группы единиц информации — ориентированных на соединение и не ориентированных на соединение. В рамках этих групп появляются классы информации, которые предъявляют различные требования к системе. Это, в первую очередь, требования к временным задержкам (чувствительна ли информация или нет к этому явлению), и в каждом из этих классов может передаваться информация, имеющая постоянную и переменную скорость. Такие требования породили на уровне 3 системы передачи сообщений подсистему управления сигнальным соединением (SCCP — Signaling Connection Control Part), управляющую передачей по сети, в зависимости от типа информации. Рассмотрим подсистемы, входящие в модель ОКС. Начнем с системы, которая раскрывает основные сигналы на уровне пользователя. Это поможет нам сравнить процедуры установления соединения в системах без ОКС и с ОКС. Потом рассмотрим другие уровни, позволяющие защитить информацию, маршрутизировать сообщение и обеспечить надежность функционирования сети. Подсистема передачи пользователя (Уровень 4). Подсистема ISUPРанее были перечислены возможные подсистемы пользователя:
Теперь нам необходимо детальное рассмотрение всех видов работы этих систем. Далее внимание будет сосредоточено на первой из них, которая подробно разбирается в этом курсе. Надо отметить, что в настоящее время подсистема ISUP — часть, относящаяся к подсистеме ISDN, — поглощает ранее развитые системы. Источник | ||||||