
Передача и представление измерительной информации
Передача результатов измерения в области физической культуры и спорта осуществляется двумя способами:
— с помощью проводной связью между спортсменом и исследовательской аппаратурой;
— путем беспроводной связи (с помощью радиоволн).
Проводная телеметрия чаще используется при лабораторных исследованиях. Она соединяет блок преобразования и предварительной обработки информации с блоком ее отображения. Проводная телеметрия отличается высокой помехоустойчивостью, но в то же время провода, идущие от спортсмена, мешают его действиям.
Радиотелеметрия лишена этого недостатка и позволяет осуществлять контроль за спортивной техникой в реальных динамических условиях учебно-тренировочного процесса и иногда в условиях соревнований. На спортсмене укрепляются датчики, усилители и преобразователи информации, радиопередатчик и антенна. Все это выполняется в очень компактном варианте и спортсмен получает возможность свободно перемещаться по спортивной площадке и выполнять те или иные упражнения. Посылаемые передающим устройством сигналы принимаются блоком, состоящим из антенны и приемника. Здесь происходит отображение, хранение и автоматическая обработка результатов измерений. В нашей стране нет серийного производства радиотелеметрических систем. Большинство таких устройств и систем создаются на радиолюбительском уровне отдельными организациями, научными сотрудниками в единичных экземплярах.
Аналоговая форма представления результатов измерений осуществляется приборами, называемыми самописцами. С их помощью получают наглядные диаграммные записи, которые позволяют анализировать динамику регистрируемого процесса.
Другая форма представления измерительной информации – с помощью цифровых приборов. Результаты измерений в этом случае высвечиваются на разных цифровых табло. Цифровая индикация может быть следующих типов:
— механические приборы цифровой индикации;
— оптические цифровые приборы;
— электронные цифровые приборы.
В электронных цифровых приборах используются светодиоды или жидкие кристаллы. Они наиболее популярны в сфере спорта. Иногда используются электронно-лучевые визуальные или печатающие приборы. В качестве печатающих применяются:
— ленточные (результаты измерений печатаются на узкой бумажной ленте);
— электрические пишущие машинки, снабженные блоком ввода данных.
При использовании электронно-вычислительной техники результаты измерений могут:
— показываться (в виде графика или цифр) на экране дисплея;
— печататься на бланке;
— записываться на магнитные диски для хранения.
Источник
Большая Энциклопедия Нефти и Газа
Передача — измерительная информация
Передача измерительной информации от первичного преобразователя ко вторичному прибору осуществляется посредством линии связи. В промышленности, в основном, используются двух -, трех — и четырех-проводные линии связи, обычно медные. [1]
Для передачи измерительной информации применяются волоконные световоды — влагозащитные световоды жесткого или гибкого типа, а также гибкие невлагозащитные световоды с сухим волокном. [2]
При передаче измерительной информации о тех или иных электрических величинах, в том числе и об активном сопротивлении реаистивногЬ датчика по проводному каналу связи, точность ИУ в большой степени яввксит от обеспечения инвариантности1 к параметрам канала свя ш, ко-торы й в большинстве случаев оказывается звеном ИУ, наиболеа подвер — Евннмм влияние дестабилизирующих факторов. [3]
При передаче измерительной информации по каналу связи она искажается под воздействием внутренних и внешних воздействий на сигнал. Дискретные сигналы в меньшей степени подвержены искажениям в процессе передачи, и эти искажения легче обнаружить. [5]
Реостатная система передачи измерительной информации строится следующим образом. От вторичной обмотки трансформатора Tpl ( рис. 56, а) выпрямленное напряжение подается на резистор R2 приемника и переменные резисторы R1 и датчик реостатный ДР. В диагональ образованного этими резисторами моста включен измерительный прибор ИП. С помощью резистора R1 устанавливают степень чувствительности прибора, а резистор R2 служит для балансировки моста. ДР соединен с чувствительным элементом передающего преобразователя. При увеличении измеряемой величины движок ДР перемещается, мост разбаланси-руется и в диагонали протекает ток, пропорциональный перемещению движка ДР. [7]
Реостатная система передачи измерительной информации строится следующим образом. От вторичной обмотки трансформатора Tpl ( рис. 89, а) выпрямленное напряжение подается на сопротивление R2 приемника и переменные сопротивления R. В диагональ образованного этими сопротивлениями моста включен измерительный прибор ИП. [8]
В процессе передачи измерительной информации в приемник попадает не только посланный передатчиком полезный сигнал, но и помехи, которые могут вызвать погрешность. [10]
Реостатная система передачи измерительной информации строится следующим образом. От вторичной обмотки трансформатора Tpl ( рис. 21, а) выпрямленное напряжение подается на сопротивление R2 приемника и переменные сопротивления R1 и датчик реостатный ДР. В диагональ образованного этими сопротивлениями моста включен измерительный прибор ИП. С помощью сопротивления R1 устанавливают степень чувствительности прибора, а сопротивление R2 служит для балансировки моста. ДР представляет собой реостат, соединенный с чувствительным элементом передающего преобразователя. При увеличении измеряемой величины движок ДР перемещается, мост разбалансируется и в диагонали протекает ток, пропорциональный перемещению движка ДР. [11]
В этих случаях передача измерительной информации производится по каналам связи, под которыми понимается совокупность технических средств для передачи сигналов. Канал связи характеризуется определенной полосой пропускания частот, зависящей от вида канала связи и наличия помех. [13]
В этих случаях передача измерительной информации производится по каналам связи, под которыми понимается совокупность технических средств для передачи электрических сигналов. [14]
Источник
Преобразователи и системы передачи измерительной информации
Страницы работы




Фрагмент текста работы
2.Преобразователи и системы передачи измерительной информации
2.1. Общие сведения
Для контроля и управления технологическими процессами широко используются системы дистанционной передачи информации, которые предназначены для сбора информации с удаленных от наблюдателя объектов. С помощью этих систем измерительная информация может быть передана на расстояние до нескольких десятков километров.
По виду энергии носителя информации системы передачи информации подразделяют на электрические, пневматические и гидравлические. В ГСП приняты следующие системы передачи, в которых информация передается в виде унифицированных сигналов: пневматическая, электрическая токовая, электрическая частотная. Реже в практике измерений используются следующие системы передачи информации: реостатная, индуктивная, дифференциально — трансформаторная, ферродинамическая, сельсинная и другие.
Перечисленные системы передачи информации получают название в соответствии с типом преобразователя. Первичные измерительные преобразователи (ПИП) систем передачи информации ГСП обычно построены на блочно-модульном принципе, что позволяет большое число технологических параметров легко и с достаточной точностью преобразовать в усилие или линейное (угловое) перемещение. Преобразование усилия в унифицированный пневматический или электрический сигнал осуществляется, как правило, промежуточными преобразователями, работа которых основана на принципе компенсации сил. Широко распространены преобразователи типа “сила-давление” (пневмосиловые) и “сила-ток” (электросиловые), а также “перемещение-ток” (магнитомодуляционные с компенсацией магнитных потоков).
ПИП в ГСП конструктивно выполняются в виде блока, включающего чувствительный элемент, к которому непосредственно подводится измеряемый технологический параметр и один из вышеуказанных промежуточных преобразователей.
2.2. Пневматическая система передачи измерительной информации
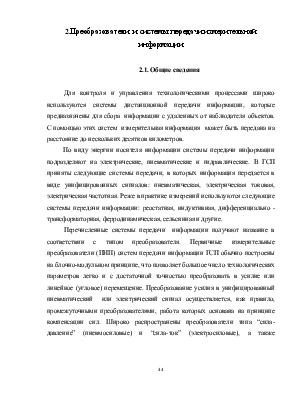
Основным элементом в пневматических преобразователях является преобразователь “сопло-заслонка”. Передача информации в пневматических системах осуществляется посредством пластмассовой или металлической трубки с внутренним диаметром 4÷10 мм на расстоянии до 300 мм, а при использовании специального усилителя мощности — до 600м. С увеличением расстояния точность системы передачи измерительной информации уменьшается.
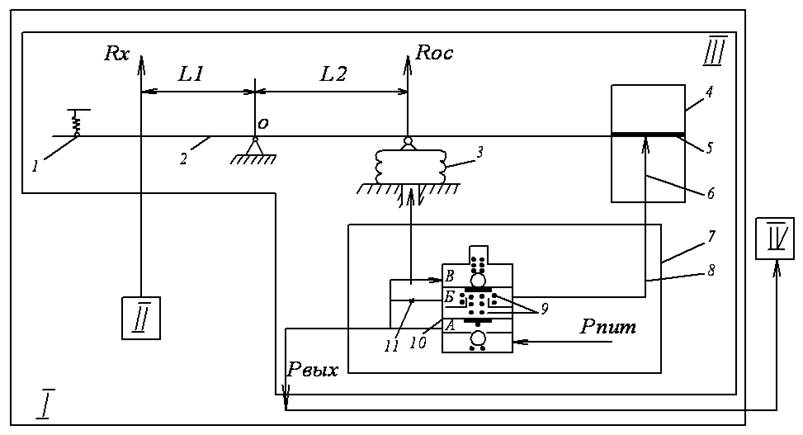
Рис.2.1. Принципиальная схема пневматической системы
На схеме (рис.2.1) ПИП I и приемник информации IV соединены между собой каналом связи. ПИП получает информацию от объекта и осуществляет преобразование измеряемого параметра в унифицированный сигнал (пневматический) Рвых. ПИП состоит из чувствительного элемента II и преобразователя “сила-давление III. Преобразователь III включает в себя корректор нуля — пружину 1; рычаг 2; сильфон обратной связи 3; пневмосопротивление — преобразователь “сопло-заслонка” 4; пневматический усилитель мощности 7. Преобразователь “сопло-заслонка” является индикатором перемещения рычага 2. Питание сопла осуществляется через усилитель 7 из линии выходного сигнала через постоянное пневмосопротивление 11. Потому давление в камере Б всегда меньше, чем в камерах А и В на одно и то же значение, которое определяется натяжением пружин 9.
При отклонении измеряемого параметра от заданного значения
Источник
Формы представления и основные принципы передачи измерительной информации




![]()
![]()
Классификация измерительных задач
Критерии классификация измерительных задач учитывают свойства измерительных сигналов, передаваемых в информационно- измерительных системах, а также существующую классификацию случайных функций, которыми и являются измерительные сигналы [39,40].
Зависимость вероятностных характеристик измерительных сигналов от начала отсчета времени. В соответствии с этим критерием случайные процессы делят на стационарные, для которых характерна независимость приведенных в предыдущем параграфе вероятностных характеристик от начала отсчета времени, и нестационарные, которым соответствует изменение распределения вероятностей при сдвиге процесса по оси времени.
Таким образом, случайный процесс X(t) называется стационарным в широком смысле или слабо стационарным, если M[X(t)]=const, D[X(t)]=const, RX(t1,t2)=R(t2,t1)=RX(t) (т.е. не зависят от времени), где t= t2-t1.
Для оценки стационарных процессов используют нормированные корреляционные функции .
На рис.5,а приведен измерительный сигнал X(t), имеющий место на выходе одного из звеньев информационно- измерительной системы, а на рис.5,б – его автокорреляционная функция ρX(t). Корреляционная функция имеет затухающий характер, так как вероятностная связь между сечениями случайного процесса (измерительного сигнала) ослабевает с увеличением отрезка времени t=tк-t1. При значительном времени t эта связь исчезает, принято считать, что этому соответствует интервал времени корреляции tк, при котором нормированная корреляционная функция ρX(t)=0,1. Это означает, что значения сигнала X(t1) и X(tк) статистически независимы. Такой вывод позволяет перейти к оценке независимых случайных значений измерительных сигналов.
В теории случайных процессов различают стационарные процессы в широком и узком смысле. Когда имеют в виду стационарный процесс, вероятностные характеристики которого не зависят от времени, подразумевают стационарный процесс в узком смысле, для которого все вероятностные характеристики постоянны во времени. Когда от времени не зависят только функции распределения вероятности не выше второго порядка (одно- , двумерные), корреляционные и спектральные функции и их числовые характеристики, случайный процесс считается стационарным в широком смысле.
Характер изменения вероятностных характеристик случайного процесса. В том случае, когда вероятностные характеристики множества реализаций равны вероятностным характеристикам одной длинной реализации, такой процесс (измерительный сигнал) называется эргодическим, если эти характеристики различны для разных реализаций – неэргодическими. Для эргодических процессов одна реализация является как бы полноправным представителем процесса в целом, по ней можно определить вероятностные характеристики всего процесса.
Обоснование эргодичности проводится или исследованием множества реализаций, или на основании изучения физической природы процесса (с точки зрения характера влияющих факторов, их взаимосвязи). Обоснование строгой эргодичности случайного процесса является сложной задачей. Проще обосновать частную эргодичность по отношению к конкретной характеристике. Для эргодического случайного процесса любая вероятностная характеристика, полученная усреднением по времени, должна совпадать с характеристикой., полученной усреднением по множеству реализаций.
Стационарные случайные процессы делятся на эргодические и неэргодические. Классификация нестационарных случайных процессов проводится по особенностям их нестационарностей [40]. Решение прикладных задач оказывается более простым, когда стационарные случайные функции оказываются эргодическими.
В результате классификации случайных функций по таким признакам, как стационарность и эргодичность, имеют место четыре класса: стационарные эргодические, стационарные неэргодические, нестационарные эргодические, нестационарные неэргодические.
Графическое изображение различных видов измерительных сигналов в соответствии вышеназванными критериями классификации показано на рис. 6. Наибольшее практическое значение имеют стационарные эргодические измерительные сигналы.

Эмпирические оценки для перечисленных видов измерительных сигналов имеют различные значения (таблица 3):
— для стационарных случайных процессов θt,=const , для эргодических — θk = const;
— для стационарного эргодического случайного процесса
— для стационарного неэргодического случайного процесса θt= θср;
— для нестационарного эргодического процесса θk = θср;
— для нестационарного неэргодического процесса все виды вероятностных характеристик различны.
Эмпирические оценки, определяемые для различных случайных процессов
| Вид процесса | Соотношения между вероятностными характеристиками | |
| Эргодический | Неэргодический | |
| Стационарный | θt= θk = θср | θt= θср; θk |
| Нестационарный | θk= θср; θt | θt ;θk ; θср |
Область существования (множество значений аргумента) и характер изменения случайной функции (множество ее значений). В соответствии с этим критерием различают:
— дискретные случайные последовательности, характеризуемые дискретным множеством аргумента и дискретным множеством значений измерительного сигнала (измерительные сигналы, квантованные по уровню и по времени ; сигналы, представляющие кодово- импульсные комбинации – в определенный момент времени каждому разрешенному уровню сигнала соответствует определенный код);
— непрерывные случайные последовательности (непрерывные по информативному параметру и дискретные по времени сигналы), для которых характерно дискретное множество значений аргумента и непрерывное множество значений функции, например, периодическая последовательность импульсов постоянного тока;
— дискретные случайные функции (непрерывные по времени и квантованные по информативному параметру сигналы), характеризуемые дискретным множеством значений при непрерывных значениях аргумента, например, сигнал на выходе цифро- аналогового преобразователя;
— случайные функции, имеющие непрерывный характер изменения при непрерывном изменении аргумента; примерами являются постоянные и гармонические токи и напряжения, мгновенные значения параметров которых связаны с измеряемой величиной.
Появление информационно- измерительных систем с дискретным аргументом, определенным на дискретном конечном или счетном множестве объясняется цифровой формой передаваемого и обрабатываемого измерительного сигнала . Такие функции называются счетными последовательностями (если аргумент – время, временными рядами).
Зависимость вероятных характеристик от характеристик в определенный момент времени. Если характер случайного процесса не зависит от его значений в предшествующие моменты времени, но определяется значением в настоящий момент времени и условной вероятностью перехода к последующему моменту времени, такой процесс называется марковским, остальные относятся к немарковским.
Рис. 5. Измерительный сигнал X(t), представляющий случайный процесс (а) и его автокорреляционная функция (б)
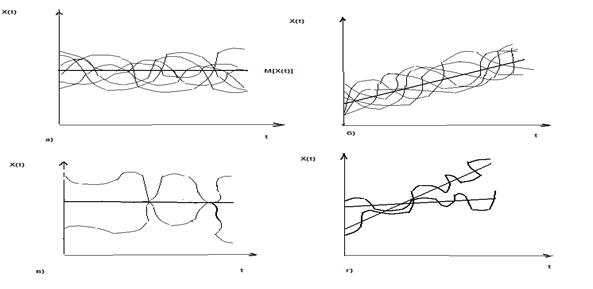
Рис.6. Измерительные сигналы, представляющие: а — стационарный эргодический процесс; б — нестационарный эргодический процесс; в — стационарный неэргодический процесс; г — нестационарный неэргодический процесс
Источник



