
Способы описания механического движения.
Способы описания механического движения.
по средством указания вектора Aв каждый момент времени –
векторный способ,естественный –по параметрам движения например пройденному частицей.
Координатный – посредством указаний проекций в декартовой системе координат.
Векторный способ описания движения заключается в нахождении величины и направления радиус-вектора rв любой
момент времени, т. е. установлении вида зависимости:
r(t) = r(t)·er(t),
где r(t) — модуль (величина) радиус-вектора;
er(t) — единичный век тор, задающий направление вектора r.
 er = r/r =
er = r/r =
Эквивалентность различных способов описания движения.
Путь и траектория. Понятие средней и мгновенной скорости и ускорения. Скорость прохождения пути. Поиск графика движения по его характеристикам.
Вектором средней скорости называется величина, равная отношению приращения радиус-вектора к промежутку времени, в течение которого оно произошло.
Vср = ∆r/∆t. Вектор средней скорости сонаправлен вектору перемещения,
но их величины не равны друг другу и, кроме того, измеряются в разных единицах. Для описания движения в конкретный момент времени
используется понятие мгновенной скорости, V=lim ∆r/∆t=dr/dt. Мгновенная скорость показывает, как быстро изменяется радиус-вектор материальной точки при бесконечно малом приращении времени Dt для выбранного момента t. Траектория – воображаемая непрерывная линия по которой перемещается мат. точка в пространстве. Вектором среднего ускорения называется физическая
величина, равная отношению приращения вектора скорости к промежутку времени, в течение которого оно произошло.
aср = ∆V /∆t. Мгновенное ускорение равно пределу, к которому стремится
среднее ускорение при ∆t, стремящемуся к нулю, или производной от вектора скорости по времени:
a=lim ∆v/∆t=dv/dt.
Скорость прохождения пути.
∆S=∫│V(t)│dt; Vs ср = ∆s/∆t;
|Vср.|(t)= 1/(t-tₒ)∫│V(t)│dt; Vsср=|V|ср.
4. Преобразования Галилея. Инвариантность пространственных и временных интервалов в классической физике. Законы преобразований скоростей и ускорений.
Преобразования Галилея.Выявим связь между пространственными координатами в неподвижной относительно наблюдателя — лабораторной СО (ЛСО) S и СО S’, движущейся
относительно нее равномерно прямолинейно. Пусть СО S’
смещается в положительном направлении вдоль оси OX с постоянной скоростьюV, для
любого момента времени можно записать выражение, связывающее радиус-вектор r‘ частицы A в подвижной и ЛСО:
rA’ = rA — r‘0 = rA – V*t.
Здесь мы учли абсолютный характер времени и предварительно проведенную операцию синхронизации часов в начальный
момент времени, когда начала обеих систем координат совпадали (т. е. tₒ = tₒ’ = 0). Спроецировав это уравнение на оси координат и учтя абсолютность времени и предварительно проведенную в этих системах от счета процедуру синхронизации часов, получим прямые и обратные преобразования Галилея:
x’ = x – V*t; y’ = y; z’ = z; t’ = t;
x = x’ + V*t’; y’ = y; z’ = z; t’ = t.
Согласно преобразованиям Галилея: одновременность — инвариант преобразований. События, одновременные в одной СО, одновременны в любой другой системе отсчета, движущейся относительно
нее равномерно прямолинейно;
временной и пространственный интервалы — инварианты преобразований Галилея.
Инвариантные величины в классической механике.
Докажем утверждение об инвариантности пространственного
интервала применительно к классической механике (т. е. его
инвариантность к преобразованиям Галилея).Пусть СО S’ движется относительно системы S с переменной скоростью V(t), много меньшей скорости света. Используя принцип независимости перемещений, можно записать, что радиус-векторы произвольных точек A и B в этих СО в приближении классической механики связаны между собой следующими соотношениями: rA=r’A+∫V(t)dt; rB=r’B+∫V(t)dt;
Из этих соотношений следует, что пространственный ин тер вал ∆r = |∆r| не зависит от вы бора СО:|∆r‘|=|r‘B- r‘A|=|rB- rA| = |∆r|. Пространственный интервал в классической механике есть абсолютная величина по отношению к выбору СО.Из однородности времени, однородности и изотропности пространства, а так же преобразований Галилея вытекают обобщения повседневного опыта и удается выявить характеристики пространственно-временных отношений, не зависящие от выбора СО, в том числе движущихся. Ими являются временные и пространственные интервалы. Временной и пространственный интервалы инвариантны по
отношению к преобразованиям Галилея.
Закон преобразования скоростей. Скорость частицы при переходе от описания движения в одной СО к описанию движения в другой изменяется в соответствии со следующим
уравнением, называемым законом преобразования скоростей:
v=v’ + V, где v — абсолютная скорость (скорость частицы относительно ЛСО); v’ относительная скорость (скорость частицы относительно движущейся СО системы S’);
Vпереносная скорость (скорость движения системы S’ относительно ЛСО).
Движение материальной точки по окружности и её кинематические характеристики: вектор элементарного углового перемещения, угловая скорость и ускорение. Связь линейных и угловых кинематических характеристик.
Движение частицы по окружности как движение с одной степенью свободы.При движении частицы поокружности меняется только направление ее радиус-вектора r(t). Уравнение, характеризующее изменение положения материальной точки со временем, имеет вид:r(t) = r·e(t), где r = const; er — единичный вектор, направленный вдоль r. Пусть радиус-вектор частицы описывает конус. Тогда его сечение плоскостью XO’Y, перпендикулярной оси OZ — оси
симметрии этого конуса, образует окружность радиуса r
В декартовой СК зависимости координат частицы от
времени имеют следующий вид: x(t)=p·cosφ(t); y(t)=p·sinφ(t),
а траектория частицы задается уравнением: x*x+y*y=p*p
Понятие вектора элементарного углов го перемещения.Рассмотрим движение частицы в плоскости XY в полярных координатах. В данном случае поскольку частица обладает одной степенью свободы, ее движение удобно характеризовать зависимостью угловой координаты (угла) от времени φ(t)и может быть описано следующим образом:
r=const. φ=φ(t) . По аналогии с понятием вектора элементарного перемещения drвведем понятие вектора элементарного углового перемещения dφ . За величину вектора dφ примем значение угла, на который повернется частица вокруг оси OZ за время dt, выраженное в радианах. Направление вектора dφ зададим таким образом, чтобы оно совпадало с осью вращения и определялось в соответствии с правилом буравчика или правого винта. следует, что вектора линейного и углов го перемещений связаны соотношением dr=[dφ*r] и не
зависят от выбора положения тела от счета (точки O) на оси
вращения. Модуль вектора drравен dr=dφ·r·sinθ=dφ·p и не зависит от выбора точки О на оси OZ Направление вектора drзадается следующим образом. Вектора dφ и rизображают исходящими из одной точки. Затем головку правого винта поворачивают от dφ к r. Направление вектора dr) будет совпадать с направлением поступательного движения правого винта. Чтобы быть вектором, величина должна удовлетворять закону сложения векторов. Последовательность перемещений на элементарные углы подчиняется этому закону и величина dφ с этой точки зрения может быть вектором. Перемещения же на конечные углы ∆φ этому правилу не удовлетворяют. Кроме этого, при повороте на конечный угол ∆φ модуль вектора перемещения равен: |∆r|=2r*sinθ*sin∆φ/2 и, следовательно, соотношение dr=[dφ*r] в этом случае не выполняется. Для малых углов поворота оно соблюдается приближенно и тем точнее, чем величина 2· sin(∆φ/2) ближе к ∆φ.
Вектор угловой скорости – физическая величина, равная производной от вектора углового перемещения по времени:
Вектор углового ускорения – физическая величина, равная производной от угловой скорости по времени:
Связь: a=sqrt(a(тао в квадрате)+a(n-ое в квардате))
A(тао)= [ε,r]. a(n-ое) =[ω[ω.r]]
Описание движения несвободных частиц в ИСО. Понятие силы и массы. Второй закон Ньютона. Процедура измерения массы, свойства массы. Понятие импульса материальной точки. Второй закон Ньютона в Импульсивной форме.
Частица, которая не изменяет в результате взаимодействия с другими телами свои свойства (например массу), но изменяет характеристики своего состояния (радиус-вектор и скорость) называется несвободной. изменение характеристик состояния несвободнойчастицы происходит под влиянием внешнего воздействия.Сила— физическая величина, являющаяся мерой воздействия одного тела или поля на другое тело. Масса – физическая величина – отражающая способность частицы сопротивляться внешнему воздействию. Масса является мерой инертности тела по отношению к внешнему воздействию. В этой связи ее называют инертной массой. Свойства массы: аддитивность — M=m1+m2. масса величина скалярная, значение которой постоянно в медленно движущихся ИСО, Второй закон Ньютона – Ускорение зависит от силы прямо пропорционально а от массы обратно пропорционально. Второй закон Ньютона можно применять в любых ИСО, движущихся со скоростями, много меньшими скорости света. Импульс – произведение массы частицы на вектор её скорости. P=mv.Закон движения в импульсивной форме:
F=ma=m*dv/dt=dvm/dt=dP/dt
10.Действие и противодействие. Третий закон Ньютона. Область применимости третьего закона Ньютона. В природе нет односторонних действий, есть исключительно взаимодействия. Третий закон рассматривает взаимодействие тел. Этот закон утверждает, что независимо от природы взаимодействия любая пара тел действует друг на друга с силами, равными по величине и направленными в противоположные стороны вдоль прямой, соединяющей эти тела.
11. Понятие неинерциальной СО. Силы инерции и их свойства. Причины возникновения сил инерции.
Сила инерции сила, сообщающая телу дополнительное ускорение, которое не вызвано взаимодействием с
другими телами или полями и обусловлено ускоренным характером движения системы отсчета. Свойства: пропорциональна ускорению, пропорциональна массе тела, направлена против вектора ускорения с которым движется НСО. (В НСО ВТОРОЙ ЗАКОН НЬЮТОНА НЕ ВЫПОЛНЯЕТСЯ)
Способы описания механического движения.
по средством указания вектора Aв каждый момент времени –
векторный способ,естественный –по параметрам движения например пройденному частицей.
Координатный – посредством указаний проекций в декартовой системе координат.
Векторный способ описания движения заключается в нахождении величины и направления радиус-вектора rв любой
момент времени, т. е. установлении вида зависимости:
r(t) = r(t)·er(t),
где r(t) — модуль (величина) радиус-вектора;
er(t) — единичный век тор, задающий направление вектора r.
er = r/r =
Эквивалентность различных способов описания движения.
Источник
Механическое движение. Траектория. Путь. Перемещение

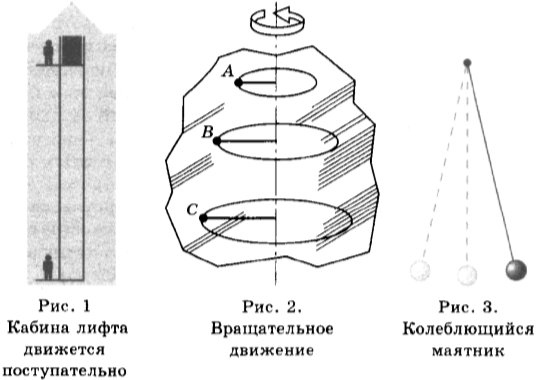
1. Механическим движением называют изменение положения тела в пространстве относительно других тел с течением времени. Существуют различные виды механического движения. Если все точки тела движутся одинаково и любая прямая, проведённая в теле, при его движении остаётся параллельной самой себе, то такое движение называется поступательным (рис. 1).
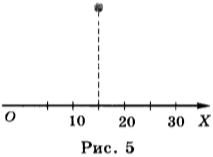
Точки вращающегося колеса описывают окружности относительно оси этого колеса. Колесо как целое и все его точки совершают вращательное движение (рис. 2).
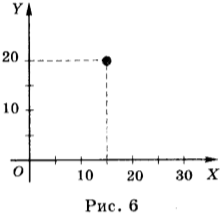
Если тело, например шарик, подвешенный на нити, отклоняется от вертикального положения то в одну, то в другую сторону, то его движение является колебательным (рис. 3).
2. В определение понятия механического движения входят слова «относительно других тел». Они означают, что данное тело может покоиться относительно одних тел и двигаться относительно других тел. Так, пассажир, сидящий в автобусе, движущемся относительно зданий, тоже движется относительно них, но покоится относительно автобуса. Плот, плывущий по течению реки, неподвижен относительно воды, но движется относительно берега (рис. 4). Таким образом, говоря о механическом движении тела, необходимо указывать тело, относительно которого данное тело движется или покоится. Такое тело называют телом отсчёта. В приведённом примере с движущимся автобусом в качестве тела отсчёта может быть выбран какой-либо дом, или дерево, или столб около автобусной остановки.

Для определения положения тела в пространстве вводят систему координат, которую связывают с телом отсчёта. При рассмотрении движения тела вдоль прямой линии используют одномерную систему координат, т.е. с телом отсчёта связывают одну координатную ось, например ось ОХ (рис. 5).
Если тело движется по криволинейной траектории, то система координат будет уже двухмерной, поскольку положение тела характеризуют две координаты X и Y (рис. 6). Таким движением является, например, движение мяча от удара футболиста или стрелы, выпущенной из лука.
Если рассматривается движение тела в пространстве, например движение летящего самолёта, то система координат, связанная с телом отсчёта, будет состоять из трёх взаимно перпендикулярных координатных осей (OX, OY и OZ) (рис. 7).
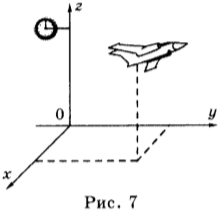
Поскольку при движении тела его положение в пространстве, т.е. его координаты, изменяются с течением времени, то необходим прибор (часы), который позволяет измерять время и определить, какому моменту времени соответствует та или иная координата.
Таким образом, для определения положения тела в пространстве и изменения этого положения с течением времени необходимы тело отсчёта, связанная с ним система координат и способ измерения времени, т.е. часы, которые все вместе представляют собой систему отсчёта (рис. 7).
3. Изучить движение тела — это значит определить, как изменяется его положение, т.е. координата, с течением времени.
Если известно, как изменяется координата со временем, можно определить положение (координату) тела в любой момент времени.
Основная задача механики состоит в определении положения (координаты) тела в любой момент времени.
Чтобы указать, как изменяется положение тела с течением времени, нужно установить связь между величинами, характеризующими это движение, т.е. найти математическое описание движения или, иными словами, записать уравнение движения тела.
Раздел механики, изучающий способы описания движения тел, называют кинематикой.
4. Любое движущееся тело имеет определённые размеры, и его различные части занимают разные положения в пространстве. Возникает вопрос, как в таком случае определить положение тела в пространстве. В делом ряде случаев нет необходимости указывать положение каждой точки тела и для каждой точки записывать уравнение движения.
Так, поскольку при поступательном движении все точки тела движутся одинаково, то нет необходимости описывать движение каждой точки тела.
Движение каждой точки тела не нужно описывать и при решении таких задач, когда размерами тела можно пренебречь. Например, если нас интересует, с какой скоростью пловец проплывает свою дистанцию, то рассматривать движение каждой точки пловца нет необходимости. Если же необходимо определить действующую на мяч выталкивающую силу, то пренебречь размерами пловца уже нельзя. Если мы хотим вычислить время движения космического корабля от Земли до космической станции, то корабль можно считать единым целым и представить в виде некоторой точки. Если же рассчитывается режим стыковки корабля со станцией, то, представив корабль в виде точки, решить эту задачу невозможно.
Таким образом, для решения ряда задач, связанных с движением тел, вводят понятие материальной точки.
Материальной точкой называют тело, размерами которого можно пренебречь в условиях данной задачи.
В приведённых выше примерах материальной точкой можно считать пловца при расчёте скорости его движения, космический корабль при определении времени его движения.
Материальная точка — это модель реальных объектов, реальных тел. Считая тело материальной точкой, мы отвлекаемся от несущественных для решения конкретной задачи признаков, в частности, от размеров тела.
5. При перемещении тело последовательно проходит точки пространства, соединив которые, можно получить линию. Эта линия, вдоль которой движется тело, называется траекторией. Траектория может быть видимой или невидимой. Видимую траекторию описывают трамвай при движении по рельсам, лыжник, скользя по лыжне, мел, которым пишут на доске. Траектория летящего самолёта в большинстве случаев невидима, невидимой является траектория ползущего насекомого.
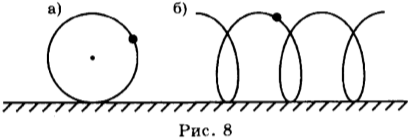
Траектория движения тела относительна: её форма зависит от выбора системы отсчёта. Так, траекторией точек обода колеса велосипеда, движущегося по прямой дороге, относительно оси колеса является окружность, а относительно Земли — винтовая линия (рис. 8 а, б).
6. Одной из характеристик механического движения является путь, пройденный телом. Путём называют физическую величину, равную расстоянию, пройденному телом вдоль траектории.
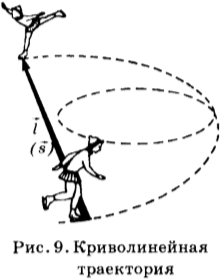
Если известны траектория тела, его начальное положение и пройденный им путь за время \( t \) , то можно найти положение тела в момент времени \( t \) . (рис. 9)
Путь обозначают буквой \( l \) (иногда \( s \) ), основная единица пути 1 м: \( [\,\mathrm
Путь — величина относительная, значение пути зависит от выбора системы отсчёта. Так, путь пассажира, переходящего из конца движущегося автобуса к его передней двери, равен длине автобуса в системе отсчёта, связанной с автобусом. В системе отсчёта, связанной с Землёй, он равен сумме длины автобуса и пути, который проехал автобус относительно Земли.
7. Если траектория движения тела неизвестна, то значение пути не позволит установить его положение в любой момент времени, поскольку направление движения тела не определено. В этом случае используют другую характеристику механического движения — перемещение.
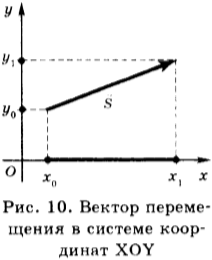
Перемещение — вектор, соединяющий начальное положение тела с его конечным положением (рис. 10)
Перемещение — векторная физическая величина, имеет направление и числовое значение, обозначается \( \overrightarrow \) . Единица перемещения \( [\,\mathrm\,] \) = 1 м.
Зная начальное положение тела, его перемещение (направление и модуль) за некоторый промежуток времени, можно определить положение тела в конце этого промежутка времени.
Следует иметь в виду, что перемещение в общем случае не совпадает с траекторией, а модуль перемещения — с пройденным путём. Это совпадение имеет место лишь при движении тела по прямолинейной траектории в одну сторону. Например, если пловец проплыл 100-метровую дистанцию в бассейне, длина дорожки которого 50 м, то его путь равен 100 м, а модуль перемещения равен нулю.
Перемещение, так же как и путь, величина относительная, зависит от выбора системы отсчёта.
При решении задач пользуются проекциями вектора перемещения. На рисунке 10 изображены система координат и вектор перемещения в этой системе координат.
Координаты начала перемещения — \( x_0, y_0 \) ; координаты конца перемещения — \( x_1, y_1 \) . Проекция вектора перемещения на ось ОХ равна: \( s_x=x_1-x_0 \) . Проекция вектора перемещения на ось OY равна: \( s_y=y_1-y_0 \) .
Модуль вектора перемещения равен: \( s=\sqrt
ПРИМЕРЫ ЗАДАНИЙ
Часть 1
1. В состав системы отсчёта входят
1) только тело отсчёта
2) только тело отсчёта и система координат
3) только тело отсчёта и часы
4) тело отсчёта, система координат, часы
2. Относительной величиной является: А. Путь; Б. Перемещение. Правильный ответ
1) только А
2) только Б
3) и А, и Б
4) ни А, ни Б
3. Пассажир метро стоит на движущемся вверх эскалаторе. Он неподвижен относительно
1) пассажиров, стоящих на другом эскалаторе, движущемся вниз
2) других пассажиров, стоящих на этом же эскалаторе
3) пассажиров, шагающих вверх по этому же эскалатору
4) светильников на баллюстраде эскалатора
4. Относительно какого тела покоится автомобиль, движущийся по автостраде?
1) относительно другого автомобиля, движущегося с такой же скоростью в противоположную сторону
2) относительно другого автомобиля, движущегося с такой же скоростью в ту же сторону
3) относительно светофора
4) относительно идущего вдоль дороги пешехода
5. Два автомобиля движутся с одинаковой скоростью 20 м/с относительно Земли в одном направлении. Чему равна скорость одного автомобиля в системе отсчёта, связанной с другим автомобилем?
1) 0
2) 20 м/с
3) 40 м/с
4) -20 м/с
6. Два автомобиля движутся с одинаковой скоростью 15 м/с относительно Земли навстречу друг другу. Чему равна скорость одного автомобиля в системе отсчёта, связанной с другим автомобилем?
1) 0
2) 15 м/с
3) 30 м/с
4) -15 м/с
7. Какова относительно Земли траектория точки лопасти винта летящего вертолёта?
1) прямая
2) окружность
3) дуга
4) винтовая линия
8. Мяч падает с высоты 2 м и после удара о пол поднимается на высоту 1,3 м. Чему равны путь \( l \) и модуль перемещения \( s \) мяча за всё время движения?
1) \( l \) = 3,3 м, \( s \) = 3,3 м
2) \( l \) = 3,3 м, \( s \) = 0,7 м
3) \( l \) = 0,7 м, \( s \) = 0,7 м
4) \( l \) = 0,7 м, \( s \) = 3,3 м
9. Решают две задачи. 1. Рассчитывают скорость движения поезда между двумя станциями. 2. Определяют силу трения, действующую на поезд. При решении какой задачи поезд можно считать материальной точкой?
1) только первой
2) только второй
3) и первой, и второй
4) ни первой, ни второй
10. Точка обода колеса при движении велосипеда описывает половину окружности радиуса \( R \) . Чему равны при этом путь \( l \) и модуль перемещения \( s \) точки обода?
1) \( l=2R \) , \( s=2R \)
2) \( l=\pi R \) , \( s=2R \)
3) \( l=2R \) , \( s=\pi R \)
4) \( l=\pi R \) , \( s=\pi R \) .
11. Установите соответствие между элементами знаний в левом столбце и понятиями в правом столбце. В таблице под номером элемента знаний левого столбца запишите соответствующий номер выбранного вами понятия правого столбца.
ЭЛЕМЕНТ ЗНАНИЙ
A) физическая величина
Б) единица величины
B) измерительный прибор
ПОНЯТИЕ
1) траектория
2) путь
3) секундомер
4) километр
5) система отсчёта
12. Установите соответствие между величинами в левом столбце и характером величины в правом столбце. В таблице под номером элемента знаний левого столбца запишите соответствующий номер выбранного вами понятия правого столбца.
ВЕЛИЧИНА
A) путь
Б) перемещение
B) проекция перемещения
ХАРАКТЕР ВЕЛИЧИНЫ
1) скалярная
2) векторная
Часть 2
13. Автомобиль свернул на дорогу, составляющую угол 30° с главной дорогой, и совершил по ней перемещение, модуль которого равен 20 м. Определите проекцию перемещения автомобиля на главную дорогу и на дорогу, перпендикулярную главной дороге.
Источник



