
Способы обнаружения подводных лодок и противолодочное оружие
У подводников есть своя профессиональная шутка: «В мире существует только один класс боевых кораблей – подводные лодки. А все остальное, что плавает по морям, это мишени». Шутки шутками, но данное высказывание не так уж далеко от истины.
Из всех средств ведения войны, когда-либо созданных человеком, coвременный подводный ракетоносец является, пожалуй, самым скрытным и разрушительным. Разумеется, борьба со столь опасным противником для флота любой страны, претендующей на роль морской державы, является задачей номер один. Подводные лодки давно показали себя очень грозным орудием войны, однако на верхнюю ступень военно-морской иерархии они поднялись только в середине XX века. Дело в том, что радиолокация лишила надводные корабли скрытности: отныне их не спасали ни ночь, ни маскировка, ни дымовые завесы. Но в воде радиоволны не распространяются, и ушедшие на глубину субмарины оставались для вражеских радаров невидимыми. Ученые предложили множество способов обнаружения подводных лодок, но по сей день ни один из них по эффективности не может сравниться с радиолокацией.

СПОСОБЫ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ЛОДОК
Подводная лодка является источником физических полей. Все эти поля выделяются на фоне естественных полей океана и выдают присутствие на глубине инородного объекта. Однако найти по ним подводную лодку не так-то просто. Дело в том, что аппаратура поиска по изменению магнитного поля, по тепловому или кильватерному следу, выхлопным газам и так далее отличается крайне невысокой дальностью действия, малой помехозащищенностью, зависимостью от погодных условий. Единственным более или менее эффективным способом обнаружения подводных целей был и остается гидроакустический. По дальности действия акустическая аппаратура превосходит магнитометрическую в десятки раз, но при этом ее работа сильно зависит от гидрологических условий моря. Например, на глубине существует зона так называемого температурного скачка, которая может служить своеобразным барьером, укрывающим цель.
Гидроакустические станции (ГАС), или сонары, могут работать в активном режиме (когда они сами излучают ультразвуковой сигнал и принимают его отраженное от цели эхо) и в пассивном (когда они принимают только шумы, исходящие от подводной лодки). Однако активный режим демаскирует охотника: подводная лодка неизбежно услышит излучающий сигнал сонара гораздо раньше, чем тот поймает отраженное эхо.
Существуют разные типы корабельных ГАС. Их антенны могут быть крупногабаритными цилиндрическими или сферическими; плоскими – для бокового обзора; буксируемыми, способными погружаться на заданную глубину. Из последних наиболее совершенными считаются гибкие протяженные антенны, выпускаемые кораблем или подводной лодкой в виде длинного «хвоста».
Для противолодочных вертолетов созданы малогабаритные опускаемые ГАС; еще более компактные станции устанавливаются на радиогидроакустических буях (РГАБ).

ГЛОБАЛЬНЫЕ СИСТЕМЫ СЛЕЖЕНИЯ
Один из самых масштабных противолодочных проектов эпохи холодной войны – американская система SOSUS (Sound Surveillance Undersea System – звуковая система подводного обзора). Это глобальная сеть стационарных шумопеленгаторных антенн, охватывающая акватории Атлантического и Тихого океанов.
В качестве дополнения к системе SOS US в США была создана позиционно-маневренная система дальнего гидроакустического наблюдения SURTASS. Ее основой являлись специальные корабли гидроакустической разведки, оснащенные мощными ГАС AN/UQQ-2.
По сообщениям печати, им удавалось обнаружить российские атомные подлодки на рекордной дальности 150 миль (278 км). В настоящее время система SOSUS законсервирована, и вместо нее используется интегрированная система освещения подводной обстановки IUSS (Integrated Undersea Surveillance System), объединяющая стационарные и мобильные комплексы дальнего гидроакустического наблюдения и боевого управления.
Следует упомянуть и о попытках следить за подводными лодками из космоса. Например, вышедший на поверхность инфракрасный (тепловой) след от атомной субмарины обнаруживается со спутника. Но эффективность такого способа подводной разведки пока остается невысокой.
ПРОТИВОЛОДОЧНОЕ ОРУЖИЕ И ЕГО НОСИТЕЛИ
Основное средство борьбы с подводными лодками – самонаводящиеся акустические торпеды. Они действуют в соответствии с принципом «выстрелил и забыл»: двигаются по спирали, постепенно увеличивая глубину; при этом их головка самонаведения постоянно сканирует подводное пространство. При обнаружении подводной лодки и ее идентификации как противника торпеда автоматически наводится на цель. Противолодочные торпеды могут выстреливаться из торпедных аппаратов надводных кораблей и подводных лодок или сбрасываться с самолетов и вертолетов. Кроме того, они используются в качестве головной части корабельных противолодочных ракетно-торпедных комплексов и «активных» противолодочных мин – таких как американская Мк 60 «Кэптор» или советская ПМТ-1. К противолодочному оружию ближнего действия относятся многоствольные реактивные бомбометы.
Они служат и средством самозащиты от вражеских торпед. Глубинные бомбы, противолодочные донные и якорные мины сейчас используются ограниченно.

ПЕРСПЕКТИВЫ
В конце 2012 года Министерство обороны США представило свою новую разработку – робота-охотника ACTUV. Этот полностью автономный аппарат является тримараном (судном с тремя параллельными корпусами) водоизмещением 157 т, оснащенным самым современным гидро-акустическим оборудованием. Он будет находиться в море в автоматическом режиме 60-90 суток. В перспективе планируется создать целую флотилию таких роботов-охотников, интегрированных в систему управления флотом. В случае обнаружения вражеской субмарины они смогут наводить на цель корабли и противолодочную авиацию.
Источник
Найти подводную лодку
Главным достоинством подводной лодки, с момента ее изобретения почти 400 лет назад, была незаметность. Скорее всего так будет и впредь, но за все эти годы появилось множество методов обнаружения подводных лодок.
Все способы поиска подводных лодок можно разделить на две группы: активные и пассивные. Активный метод — с использованием своего излучения и отражения сигнала, пассивный — только излучение или возмущение среды вызванные целью.
Визуальный метод
Вода прозрачна и лодку банально видно с воздуха пока она находится на небольшой глубине. А уж если она не погрузилась, то кильватерный след будет виден и с орбиты, а главное, он будет хорошо заметен еще некоторое время после погружения.

Также интересным приемом поиска можно считать наблюдение за морем ночью. В воде обитает огромное количество светящихся организмов. Любой объект прошедший сквозь «облако» флуоресцентного планктона оставит длинный и хорошо заметный шлейф. Даже если глубина будет большой, этот шлейф может подняться ближе к поверхности и демаскировать подводную лодку. Правда нет никаких данных об эффективности такой методики. Свечение ведь довольно слабое.

Так светится планктон в некоторых частях мирового океана
Известный факт, скорость распространения колебаний зависит от плотности среды. Жидкость плотнее газа, а значит шум издаваемый подлодкой будет распространяться в ней очень хорошо. В 4,5 раза быстрее, если сравнивать атмосферу на уровне моря и воду на поверхности. Именно поэтому эхолокация — это самый популярный метод.
Интересно, что вода в море-океане на однородна, скорость звука зависит от температуры и давления. К тому же существуют такие явления как «подводные звуковые каналы», где звук распространяется на большее расстояние и зоны с эффектом «акустической тени», в которой лодка может скрываться.
Любая подводная лодка, противолодочный корабль, самолет или вертолет имеет на борту ГАС (гидроакустическую станцию). У подлодки или надводного корабля она является частью конструкции, либо может быть буксируемой, в авиации — только буксируемой (или сбрасываемой). Но работают все гидролокаторы одинаково, улавливают звук (пассивный режим) или испускают свои звуковые сигналы, чтобы обнаружить отраженный от препятствия эхо-сигнал.
По тому же принципу работают гидроакустические буи, которые обычно сбрасывают с самолетов, вертолетов или кораблей противолодочной обороны и стационарные системы подобные американской SOSUS. Слушают море.
Для подводников, существует хороший способ остаться не обнаруженной — поменьше шуметь. Но когда применяется активная эхолокация, шансов становится меньше, ведь создать покрытие или форму совершенно не отражающее звуковые волны невозможно, так же как и в случае с радиолокатором и самолетом-невидимкой — абсолютной невидимости не существует.
Кильватерный след
Это шлейф из вихрей который оставляет за собой любое судно при движении. Обычно его хорошо видно, но в случае субмарины это не так, если она находится глубоко под поверхностью. Это проблема для всех, кроме другой подлодки.
Эхолокаторы созданные в СССР были менее эффективны по сравнению с аналогами у вероятного противника. Поэтому в 70 годах 20 века была создана целая серия устройств позволяющих отслуживать чужие субмарины по их кильватерному следу (СОКС). Работает устройство используя принцип когерентной оптической томографии, это то же самое, что и эхолокация, но вместо звуковых волн — оптические, инфракрасного диапазона. Дело в том, что длинный хвост из вихрей созданных винтом по другому переломят свет, чем относительно спокойная жидкость вокруг, а значит, достаточно чувствительный датчик это заметит.

Проект 971 «Щука-Б» то, что выглядит как трубки на рубке — СОКС
Магнитометр
Подводная лодка, это большое металлическое судно, а значит имеет достаточно сильное собственное магнитное поле, по которому ее можно засечь. Для этого используется магнитометр. Фактически, это обычная электромагнитная катушка. Впервые такой прием был применен в далеком 1915 году и тогда это была просто индукционная петля, лежащая на дне, в которой возникал ток при проходе над ней корабля.
Проблема с магнитометрическим способом существенная, чтобы что-то найти нужно оказаться почти точно над (или под) целью. Чуть влево или вправо, цель останется незамеченной. Магнитометры применяются в противолодочной авиации, но не как основной метод обнаружения подводной лодки, а как вспомогательный.

P-3 «Orion». Магнитометр выглядит как длинная балка на хвосте. Красный квадрат на фюзеляже — блок гидроакустических буев
Выхлопные газы
Если субмарина оборудована двигателем внутреннего сгорания, а не ядерным реактором или воздухо-независимым двигателем, ее можно обнаружить по специфическому запаху. В английском прибор-газоанализатор так и называется «нюхач» sniffer. Но время идет и «сесть на хвост» подводной лодке с воздухо-независимой или атомной силовой практически невозможно.
По неподтвержденным данным, существуют приборы способные определить наличие в воде даже ничтожного количества посторонних примесей, таких как частички краски или обшивки. Но это похоже скорее на легенду, чем на действительно рабочий прием.
Тепловой след и радиация
Ядерный реактор нуждается в охлаждении. Для этого используется морская вода, которая после ее использования становится теплее. В инфракрасном диапазоне волн тепловой след достаточно заметен даже из космоса, чтобы демаскировать субмарину. Тоже касается и следов радиации в использованной воде, ее также можно обнаружить. Не ядерным силовым установкам точно так же нужно охлаждение, хотя и не такое интенсивное, как реактору.
Радиолокация
Один из самых современных методов. Еще во время Второй Мировой появилась возможность обнаруживать поднятый перископ или шноркель (выхлопную трубу) субмарины при помощи радаров. Но сегодня существуют и более продвинутые методы — поиск по возмущениям водной поверхности. Причем сам объект может двигаться на большой глубине, а след от него в виде специфических зыби, можно выделить на фоне стандартного волнения океана.
С таким эффектом знаком любой рыбак наблюдавший так называемый горб Бернулли и Волны Кельвина. Рыба глубоко, ее не увидеть с помощью зрения, но на поверхности воды при быстром движении появляется заметные круги.

Примерно так выглядит возмущение от движущегося под водой объекта
Эффект известный, но до наших дней использовать его не было возможности. Сейчас специальное программное обеспечение уже может отличить обычные волны в океане от рисунка Волн Кельвина высотой несколько миллиметров, полученном с помощью радара.
Например, у японского специализированного самолета «Кавасаки» Р-1 сразу 4 радара дающие обзор на все 360 градусов. Наверняка они появились на борту не просто так.

Kawasaki P-1. Есть и магнитометр, и акустические буи, и радары
Итак, найти подлодку можно используя несколько приемов: услышать, увидеть, заметить ее след или изменение физических полей. А лучше использовать сразу несколько способов поиска подводных лодок, для надежности. Не стоит сбрасывать со счетов и прослушивание радио эфира (подводникам нужно иногда выходить на связь) и возможность предугадать вероятный маршрут и банальный шпионаж. Скрытность не бывает абсолютной.
Источник
Найти невидимку: системы обнаружения субмарин
Корабль-невидимка, способный внезапно напасть из самой неожиданной точки, – именно такими задумывались субмарины и до самого последнего времени такими и оставались. Скрытность ПЛ особенно повысилась после появления атомных и воздухонезависимых энергетических установок (в 50-х годах XX века). ХХ век, возможно, когда-нибудь назовут веком подводных лодок. В XXI веке подводный флот либо вообще перестанет существовать, либо изменится самым радикальным образом.

Однако подводный флот в его нынешнем виде, скорее всего, умирает. Море перестает быть пространством, где корабли способны оставаться незаметными для противника. А произошла эта перемена в результате появления систем, позволяющих отслеживать любые передвижения сколько-нибудь крупных подводных объектов.
От шумопеленгаторных систем к комплексным СОПО
История развития подводных лодок – а их массовое строительство началось в первой четверти XX века – является иллюстрацией к знаменитому тезису о соперничестве средств нападения и защиты. Первоначально никаких средств обнаружения ПЛ, находящихся в подводном положении, не существовало вовсе. В надводном же положении ПЛ, из-за особенностей конструкции, обладали весьма малой заметностью. Эти боевые качества, которые делали ПЛ едва ли не самым грозным морским оружием своего времени, сохранялись вплоть до 1941 года. Именно тогда на противолодочных самолетах британской авиации впервые появился радиолокатор. Он уверенно обнаруживал подводные лодки, находящиеся в надводном положении, а тогдашние ПЛ заслуживали название не столько подводных, сколько «ныряющих», ибо как минимум половину боевого похода вынуждены были идти «над водой». Обнаруженная радиолокатором лодка не успевала погрузиться и практически гарантированно уничтожалась. Почти в тот же период – и тоже британцами – был создан эффективный гидролокатор, и группы противолодочных кораблей начали уверенно локализовывать и уничтожать подводные лодки в подводном положении. В результате к концу войны эффективность немецкого подводного флота была практически сведена к нулю.
Однако с появлением атомного подводного флота возможность обнаружить подводную лодку в надводном положении исчезла – лодка больше не всплывала на поверхность во время боевого похода. А обнаружить ПЛ под водой силами поисково-ударных групп было делом чрезвычайно хлопотным. Это стало толчком для создания глобальных систем освещения подводной обстановки, прежде всего гидроакустических. При этом главным средством обнаружения ПЛ стала пассивная гидроакустика, или шумопеленгация, – главным образом из-за своей относительной дешевизны, технологической простоты и способности обнаруживать цели на больших расстояниях. Наиболее впечатляющей шумопеленгационной системой является созданная Соединенными Штатами во времена холодной войны знаменитая система SOSUS. Она представляла собой гигантские поля акустических антенн, раскинутых в Атлантическом и Тихом океанах. На нашем ближнем Севере они располагались на всем пространстве Лофотенской котловины – от берегов Норвегии до острова Ян Майн. После развертывания системы cкрытый проход советских подводных лодок в Атлантику и Тихий океан оказался практически невозможен: ПЛ обнаруживались на расстоянии до нескольких сотен километров.
Между тем атомный подводный корабль изначально был сооружением довольно шумным. Шумность первых американских АПЛ «Наутилус» и «Сивульф» составляла около ста децибел. Шумят корабельные механизмы (двигатели, насосы, вентиляторы, валы и проч.), шумят гребные винты, шумит вода, обтекающая корабль… Снижение шумности — единственный способ противодействия шумопеленгаторным станциям обнаружения и системам, подобным SOSUS. Шумность снижали, впрочем, и по другим причинам — например, для снижения радиуса реагирования неконтактных взрывателей минно-торпедного оружия. Конструкторы оттачивали геометрию гребных винтов, повышали точность изготовления валов и деталей машин, предусматривали системы амортизирующих креплений, гасящие вибрацию (а значит, и шум) механизмов, придумывали специальные покрытия корпуса. Начиная с 70-х годов прошлого века АПЛ снижали свою шумность в среднем на 1 дБ в два года. Только за последние 19 лет — с 1990 года по настоящее время — средняя шумность АПЛ США снизилась в десять раз, с 0,1 Па до 0,01 Па.
Для иллюстрации: со второй половины XX века одним из самых эффективных способов обнаружения субмарин стало использование для этой цели атомных подводных лодок, так называемых «лодок-охотников». Однако в наше время их поисковая производительность упала до совершенно смешного уровня. Согласно данным, публиковавшимся в открытой зарубежной печати, АПЛ типа 688I SSN 772 «Гринвилл» (1995 года постройки) обнаруживает АПЛ типа 688 «Лос-Анджелес» (1978 года постройки) на расстоянии от 10 до 35 км. Это вполне приемлемый результат. Но современную «Вирджинию» (SSN 774, 2004 года постройки) «Гринвилл» обнаруживает на дистанции всего от 1 до 4 км (по оценке независимого британского эксперта адмирала Палмера). Если лодки «видят» друг друга только на таких расстояниях, то само их маневрирование рядом друг с другом становится смертельно опасным не только для «жертвы», но и для «охотника»: резко увеличивается риск неожиданного столкновения не видящих друг друга кораблей.
(Отдельно заметим — сколько-нибудь близкие к истине данные о шумности российских подводных лодок и расстоянии их обнаружения невозможно увидеть иначе как под грифом «секретно».)
Резкое снижение дальности обнаружения шумопеленгаторными ГАС малошумных подводных лодок, событие революционное с технологической точки зрения, совпало с революционными переменами в политике — распадом СССР. Под конец XX века подводные лодки Советского Союза (и России) фактически перестали рассматриваться в качестве военной угрозы для США и Западной Европы. Два эти обстоятельства имели далеко идущие последствия. Соединенные Штаты изменили свою стратегию ведения войн и, в частности, применения военно-морских сил. Вместо глобального противостояния с флотом противника на морских и океанских просторах, в локальных войнах и вооруженных конфликтах основной задачей ВМС стало нанесение ударов из окраинных морей по территории противника.
Система SOSUS из-за снижения эффективности и фактического отсутствия противника была законсервирована. А для решения задач противолодочной обороны в США был поставлен вопрос о создании быстроразвертываемых многоэлементных региональных систем освещения подводной обстановки (СОПО), предназначенных для работы в планируемых районах боевых действий. Перед СОПО было выдвинуто главное требование: немедленно обнаруживать любой подводный объект при заходе в назначенную зону ответственности. Так закончилось время глобальных систем обнаружения подводных лодок.
Современные СОПО становятся локальными и комплексными. Они должны быть быстроразвертываемыми, многоэлементными, би- или мультистатическими, работающими на различных принципах обнаружения (не только акустическом), сформированными на методах сетецентрической архитектуры с обязательным обеспечением работающих элементов связью и позиционированием от систем космического базирования. На сегодняшний день подобные системы созданы и испытаны.
Гигантская сеть
В середине 1990-х — начале 2000-х годов в ВМС США были разработаны и приняты к исполнению документы, определяющие задачи ВМС и облик будущих войн на море. Среди прочих положений эти концепции включали в себя описание перспективных принципов противолодочной борьбы. Тогда и был провозглашен отказ от стационарных пассивных шумопеленгаторных систем (таких, как SOSUS) в пользу активно-пассивных гидроакустических систем освещения подводной обстановки быстрого развертывания.
Что представляют собой такие системы? Группа заранее размещенных в море излучателей (установленных либо на дне, либо на заданной глубине или же буксируемых) посылает по заданной программе в установленных частотных диапазонах и интервалах времени акустические сигналы. Эти сигналы принимает целая сеть также заранее развернутых специальных антенн (они могут быть размещены на подводных лодках, надводных кораблях, системах сбрасываемых радиогидроакустических буев, антенных решетках, размещенных на дне, и т. д.). Эта группа работает как одно гигантское гидролокационное устройство, позволяющее в кратчайший срок по эхосигналам получить координаты зашедшей в зону ответственности системы цели. С командного пункта СОПО информация о цели с помощью космической связи передается на командный пункт объединенного оперативного формирования. Таким образом местонахождение даже самой современной и малошумной подводной лодки может быть немедленно установлено — и ее уничтожение предельно упрощается.
Собственно развертывание элементов СОПО может происходить с самых разных носителей — подводных лодок (с помощью необитаемых автоматических подводных аппаратов, базирующихся на материнской подводной лодке, а также легких водолазов), надводных кораблей, самолетов и вертолетов. Основным средством доставки систем подводного наблюдения предполагается сделать малые быстроходные надводные корабли программы LCS, а также подводные лодки типа SSGN. Под размещение элементов СОПО — излучателей LELFAS (Long-Endurance Low-Frequency Active Source) и приемников ADS (Advanced Deployable System) — уже переоборудованы АПЛ типа «Огайо», SSGN 726-729. Кроме того, в следующем году будет заложена и к 2012 году построена головная многоцелевая АПЛ второй подсерии SSN 774 — SSN 784, специально оборудованная для доставки и размещения мультистатических СОПО.
Акустические излучатели LELFAS имеют габариты половины торпеды Mk-48 (длина около 3 м), размещаются в стандартном торпедном аппарате и рассчитаны на непрерывную работу в течение 30 суток. Их сигнал улавливают размещенные на дне моря шумопеленгаторные приемники ADS — оптические гидроакустические гирлянды антенн.
Эти приемники выглядят как кабель из оптоволокна диаметром 2 мм и длиной примерно 20 км. В каждой из приемных систем две секции по 10 км длиной, в каждой секции — до 26 модулей, в каждом модуле — чуть больше тысячи принимающих сигнал гидрофонов. Приемники ADS могут быть скрытно развернуты менее чем за пятеро суток, установка же излучателей требует еще меньшего времени (их изготавливают в виде специальных буев, которые могут быть установлены в том числе и с самолетов). Лежащие на грунте элементы ADS осуществляют связь с командными пунктами при помощи необитаемых подводных аппаратов — морских планеров Sea Glider, выполняющих функцию антенн.
Современные подводные лодки обладают возможностью подходить к этим системам, подключаться к ним через специальные стыковочные узлы и в результате скрытно контролировать значительные пространства морской акватории.
Система ADS принята на вооружение ВМС США в 2001 году, и на сегодняшний день изготовлено более десятка ее комплектов. Во время испытаний системы LELFAS — ADS в июле 2003 года на шельфе в районе острова Ньюфаунленд дальность уверенного обнаружения системой, работающей в активно-пассивном режиме, ПЛА SSN 21 колебалась в пределах 30-35 км.
АПЛ типа SSGN 726, имеющая на борту четыре комплекта антенн ADS, может создать «поле освещенной подводной обстановки» площадью около 2500 квадратных миль.
Группа из трех кораблей типа LCS, развернув систему ADS и имея на борту буксируемые излучатели для подсветки целей LFAS и противолодочные вертолеты, способна в течение длительного времени контролировать акваторию общей площадью более 30 000 квадратных миль (96 100 км2, что представляет собой квадрат со стороной 310 км).
Ни одна сколько-нибудь крупная подводная цель в результате применения этой системы не способна остаться незамеченной.
Будущее — за маленькими
Что же теперь — подводному флоту как военной силе приходит конец? Данный вопрос пока остается открытым.
Слабость описанных СОПО заключается в их локальном применении. Они способны эффективно работать лишь в том случае, если доминирующей силой в Мировом океане является флот Соединенных Штатов. Но если Китай к 2030 году решит довести численность своего атомного подводного флота до 300 единиц, из которых 200 постоянно будут развернуты на просторах Тихого океана, решить задачу противолодочной борьбы подобными системами будет в принципе невозможно. В том, что технически, финансово и организационно Китай на это способен, никаких сомнений нет.
При сохранении количественного соотношения подводных сил средство противодействия подобным системам обнаружения ПЛ может быть только радикальным — это ядерное оружие, применение которого по понятным причинам рассматривается лишь в качестве самого последнего варианта. Бригады тральщиков и легких водолазов теоретически тоже могли бы заниматься поиском и уничтожением излучателей и приемников систем СОПО — однако подобная работа требует использования поистине громадного флота, надежнейшим образом прикрытого авиацией. Словом, овчинка не стоит выделки.
Собственно, уже сейчас ясно, что применение быстроразвертываемых СОПО полностью изменит ход вооруженной борьбы на море. Использование подводных лодок в том виде, в каком они существуют сейчас, станет практически невозможным. А это значит, что подводные лодки будущего, скорее всего, будут иметь принципиально иной облик. Среди прочих рассматривается, например, такой, вероятно, наиболее перспективный вариант: оснащение крупных, «материнских» АПЛ небольшими автоматическими подводными аппаратами. Эти аппараты, в свою очередь, как матрешки, будут содержать в себе другие, еще меньшего размера, предназначенные для выполнения самых разных задач, от связи и разведки до нанесения минно-торпедных ударов. «Материнская» лодка не станет даже приближаться к зоне ответственности противолодочных сил противника, туда отправятся практически незаметные, крошечные, но многочисленные подводные роботы узкой специализации. Никакая СОПО не сможет обнаружить подводные аппараты величиной с рыбу среднего размера.
Остается только догадываться, какие средства противодействия будут придуманы против них.
Принципы СОПО
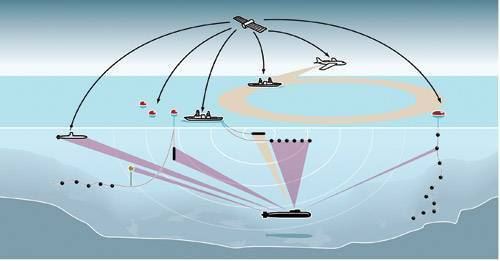
Подводная лодка (в центре) обнаруживается системой, состоящей из излучателя, буксируемого надводным кораблем, и многочисленных приемников: буксируемой антенны надводного корабля, ГАК подводной лодки, гидроакустическими буями и разложенными на грунте линейными антеннами. Координаты каждого элемента СОПО в каждый момент времени известны благодаря системе спутникового позиционирования. Работа корабельного соединения и СОПО координируется с помощью космической связи, системы AWACS; с любого элемента соединения — подводной лодки или надводных кораблей — могут быть использованы средства поражения обнаруженной лодки противника. Система обстановки освещается как с подводной, так и с надводной частей. Для освещения надводной части используются космические аппараты, самолеты ДРЛО и надводные корабли. Комплексная информация об обстановке в районе боевых действий концентрируется на командных пунктах, расположенных на надводных кораблях и на берегу.
Способы обнаружения
Помимо гидролокации, лодка может быть обнаружена еще по трем десяткам различных физических полей и вызываемых действиями лодки явлений.
Соответствующие датчики отслеживают изменения в естественном фоне среды, которые вызываются присутствием корабля. Например, в результате прохождения лодки изменяется давление воды, образуется волна повышенного гидростатического давления, что легко может быть зафиксировано. Сейсмические датчики могут отследить вызванные прохождением подводной лодки колебания морского дна (лодка оказывает давление на воду, а та в свою очередь на морское дно). Из-за прохождения лодки изменяются освещенность подводного дна, магнитное поле, гравитационное поле Земли. Наконец, со спутника при определенных условиях можно увидеть волновой след лодки, даже если она идет глубоко под водой. Современные системы противолодочной борьбы используют целый комплекс средств поиска — что-нибудь да должно сработать.
Источник



